курсовой проект. КП (2 вариант). Курсовой проект по дисциплине Техническая механика
 Скачать 249.06 Kb. Скачать 249.06 Kb.
|

 Министерство науки и высшего образования Российской Федерации Министерство науки и высшего образования Российской ФедерацииКумертауский филиал федерального государственного бюджетного образовательного учреждения высшего образования «Оренбургский государственный университет» (Кумертауский филиал ОГУ) Кафедра электроснабжения промышленных предприятий КУРСОВОЙ ПРОЕКТ по дисциплине «Техническая механика» на тему «Структурный, кинематический и силовой анализ механизма» КФ ОГУ 13.03.02. 2 1 22. 792 ПЗ Руководитель работы __________ Полякова Л.Ю. «____»___________2022 г. Выполнил Студент группы 21ЭЭ(ба)Э ____________ Балашов Д.А. «____»____________2022 г. Кумертау 2020 Аннотация Курсовой проект посвящен структурному, кинематическому и силовому анализу механизма. Большое место в работе уделено графоаналитическим методам кинематического исследования механизма; методу графического дифференцирования, навыку выполнения математических расчетов; построению с помощью методов планов для конкретного мгновенного значения времени, планов положений, скоростей и ускорений точек звеньев механизма. Работа содержит___27__ листов текста, __6___ рисунков. У  словие задания на курсовой проект: Вариант задания № 92 словие задания на курсовой проект: Вариант задания № 92
Для технологической машины, блочная схема которой приведена на рисунке 1, выполнить разделы: Структурный анализ механизмов машины. Кинематический анализ и кинематический синтез зубчатого механизма. Кинематический и силовой анализ рычажного механизма. Расчет потребной мощности, приведенной к кривошипу рычажного механизма. В состав машины входят: электродвигатель (1), муфта (2), зубчатый механизм (3), рычажный механизм (4). Схемы механизмов и исходные данные для расчетов приведены в вариантах заданий.  Рисунок 1- Схема механизма Машина работает в установившемся циклическом режиме. Цикл включает рабочий и обратный ход. В начале рабочего хода точка Е находится в крайнем левом положении, в конце рабочего хода – в крайнем правом положении. При рабочем ходе машины на ее выходное звено в точке Е действует постоянная по модулю сила производственного сопротивления Fc, направленная противоположно скорости точки Е. При обратном ходе машины сила сопротивления отсутствует. Содержание
Введение Последовательное наступление научно-технического прогресса ставит перед вузами новые, более сложные задачи подготовки профессионалов, способных не отставать от темпов его развития, а именно усовершенствования современного оборудования, обеспечивающего механизацию и автоматизацию всех процессов производства в энергетике. В виду этого основным назначением механизма является выполнение требуемых движений, которые описываются кинематическими характеристиками. Очевидно, что строение механизма, действующие на него силы оказывают влияние на его движение. Чтобы выбрать механизм, который бы обеспечивал требуемое движение, необходимо, прежде всего, знать основные виды механизмов и их возможности, затем при выбранной структурной схеме и размерах звеньев найти его кинематические характеристики, по заданному движению определить действующие на звенья и в кинематических парах силы. При таких условиях основная задача кинематического анализа механизмов является как определение положений звеньев и построение необходимых траекторий их точек; определение линейных скоростей и ускорений этих точек, а также угловых скоростей и ускорений звеньев. Более того вопрос об определении сил имеет большое значение при расчетах на прочность отдельных деталей, звеньев и кинематических пар механизмов, расчетах на износ трущихся деталей в кинематических парах, определении потребной мощности, оценке точности механизма, обосновании мощности двигателей систем автоматики, регулировании скорости движения. Автоматизация как один из решающих факторов научно-технического прогресса коренным образом меняет положение человека в производстве. С ростом автоматизации возрастают требования не только к опыту и практическим навыкам, а прежде всего к общетехническим знаниям современного работника и его способностям усваивать новые знания. Так при разработке технической документации на проектируемое изделие создается комплект конструкторской документации, включающей в себя как графические (схемы, чертежи и эскизы), так и текстовые (ведомости, пояснительные записки, спецификации и т.п.) документы. Но труд проектировщика и конструктора заключается не только в умении составлять и оформлять техническую документацию. Это также творческий процесс, решающий широкий крут задач. При изучении курса технической механики предлагается в данной работе рассмотреть задачу доработки конструкции существующего изделия, решение которой базируется на знаниях, умениях и навыках, полученных при изучении данного курса. 1 Структурный анализ механизмов 1.1 Структурный анализ зубчатого механизма Кинематическая схема зубчатого механизма состоит из одной ступени - планетарной однорядной передачи с одновенцовым сателлитом, с одним внешним (1 - 2) и одним внутренним (2 - 3) зацеплением, передаточное отношение которого находится в диапазоне от 3 до 10 [3]. Движение передается от солнца 1 к водилу Н. При этом водило Н является выходным звеном планетарного зубчатого механизма. Схема зубчатого механизма приведена ниже на рисунке 2. 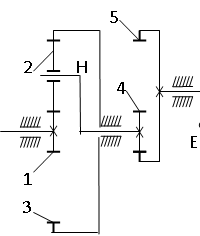 1 - солнечное колесо; 2 - сателлит; 3 - эпициклическое колесо; 4 – зубчатое колесо; 5- зубчатое колесо; 0 - стойка. Рисунок 2 – Планетарный редуктор Степень подвижности зубчатого механизма определяется по формуле П.Л.Чебышева (1): W = 3n - 2Р5 - Р4, (1) где n = 3 (1; 2; Н) - число подвижных звеньев данного механизма; Р5 = 3 (1 - 0; 2 - Н; Н - 0) - число кинематических пар пятого класса; Р4 = 2 (1 - 2; 2 - 3) - число кинематических пар четвертого класса. Подставляем числовые значения в формулу (1): W = 3∙3 - 2∙3 - 2 = 1 Вывод: Степень подвижности заданного редуктора с тремя подвижными звеньями равна 1 1.2 Структурный анализ рычажного механизма В шарнирно-рычажных механизмах жесткие звенья типа стержней, рычагов соединяются вращательными и поступательными кинематическими парами. Эти механизмы применяют для преобразования вращательного или поступательного движения в любое движение с требуемыми параметрами. Наибольшее распростроение получили плоские четырехзвенные механизмы с тремя подвижными и одним неподвижным звеньями [5]. «Родоначальником» этой группы является шарнирный четырехзвенник (Рисунок 3), служащий для преобразования равномерного вращения ведущего звена 1 в неравномерное вращение звена 3. 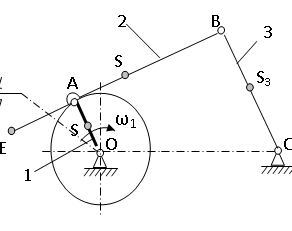 1 -кривошип; 2 -шатун; 3 -коромысло; 0 - стойка. Рисунок 3 – Шарнирный четырехзвенник Степень подвижности рычажного механизма определяется по формуле П.Л.Чебышева (1), где n = 3 (1; 2; 3) - число подвижных звеньев данного механизма; Р5 = 4 (О; А; В; С) - число кинематических пар пятого класса; Р4 = 0 - число кинематических пар четвертого класса. Подставляем числовые значения в формулу (1): W = 3∙3 - 2∙4 - 0 = 1 Вывод: Степень подвижности рычажного механизма с 3-я подвижными звеньями равна 1. Согласно принципа А.В.Ассура [1]: «Схема любого механизма может быть составлена последовательным присоединением к начальному звену групп звеньев с нулевой степенью подвижности». Расчленение рычажного механизма на группы А.В. Ассура начинаем с наиболее удалённых от входа звеньев. Рассмотрим кинематическую цепь, состоящую из звеньев (3 – 2) (Рисунок 4). 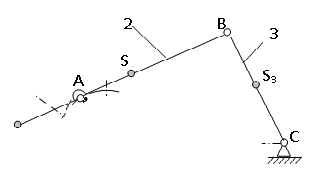 Рисунок 4 – Кинематическая цепь (3 – 2) Степень подвижности кинематической цепи (3 – 2) определяем по формуле П.Л.Чебышева (1), где: n = 2 (2; 3) - число подвижных звеньев данного механизма; Р5 = 3 ( А; В; С) - число кинематических пар пятого класса; Р4 = 0 - число кинематических пар четвертого класса. Подставляем числовые значения в формулу (1): W = 3∙2 - 2∙3 - 0 = 0 Вывод: Степень подвижности кинематической цепи (3 – 2) равна 0, являющейся присоединенной группой Ассура. Далее рассмотрим кинематическую цепь, состоящую из звеньев (1– 0) (Рисунок 5). 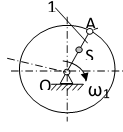 Рисунок 5 – Начальное звено рычажного механизма Степень подвижности кинематической цепи (1 – 0) определяем по формуле П.Л.Чебышева (1), где: n = 1 (1) - число подвижных звеньев данного механизма; Р5 = 1 ( О) - число кинематических пар пятого класса; Р4 = 0 - число кинематических пар четвертого класса. Подставляем числовые значения в формулу (1): W = 3∙1 - 2∙1 - 0 = 1 Вывод: Степень подвижности начального или ведущего звена кинематической цепи (1 – 0) равна 1, тогда строение рычажного механизма, согласно принципа А.В.Ассура: (1 – 3) = (0 – 1) + (2 – 3) 2 Кинематический анализ механизма 2.1 Кинематический синтез зубчатого механизма Задача кинематического синтеза –это определение передаточного отношения планетарной ступени (Рисунок 6), определение чисел зубьев колес для обеспечения данного передаточного отношения, а также проверка для планетарной передачи условий соосности, соседства и сборки.  Рисунок 6 – Планетарная передачи (1 - Н) от солнца к водилу при заторможенном эпицикле С одной стороны, передаточное отношение планетарной однорядной передачи (1 - Н) от солнца к водилу при заторможенном эпицикле определяется по формуле (2);  , (2) , (2)где z3– число зубьев неподвижного зубчатого колеса (эпицикла); z1– число зубьев солнечного зубчатого колеса. C одной стороны, передаточное отношение зубчатого механизма: I16= i1H*i45, (3) где I15=  – частное передаточное отношение второй ступени цилиндрической передачи внешнего зацепления (4-5). В результате после подстановки имеем: – частное передаточное отношение второй ступени цилиндрической передачи внешнего зацепления (4-5). В результате после подстановки имеем:I15=  I45=  - передаточное отношение второй ступени цилиндрической передачи внешнего зацепления (4-5 - передаточное отношение второй ступени цилиндрической передачи внешнего зацепления (4-5 С другой стороны, передаточное отношение планетарной однорядной передачи (1 - Н) от солнца к водилу при заторможенном эпицикле определяется по формуле (3);  , (4) , (4)где n1, nH – число оборотов колеса 1 и водила Н. Согласно задания: n1 = 2950 об/мин; ωкрив = 15 рад/с., то nH = ωкрив/ 2π. Подставляем числовые значения в формулу (3).  Поскольку планетарная однорядная передача (1 - Н) от солнца к водилу при заторможенном эпицикле может иметь передаточное отношение от 3 до 10, то принимаем U1H = 5. В этом случае i45=  . Отсюда следует, что Z4=20, а Z5=80. . Отсюда следует, что Z4=20, а Z5=80. В планетарной однорядной передачи от солнца к водилу при заторможенном эпицикле:  = i1Н - 1; = 5 - 1 = 4. = i1Н - 1; = 5 - 1 = 4.При этом согласно методических указаний [1], принимаем z3= 84 (число зубьев неподвижного зубчатого колеса (эпицикла)); тогда из формулы (2) получаем число зубьев солнечного зубчатого колеса z1= 84 / (5 – 1) = 21. Число зубьев сателлита z2 планетарной однорядной передачи определяем из выполнения условия соосности: z3 = z1 + 2 z2; …………………………..(5) Отсюда z2 = (z3- z1 ) / 2 = 31,5; принимаем z2 = 32. Проверяем планетарную однорядную передачу от солнца к водилу при заторможенном эпицикле на выполнения условия соседства: (z1 + z2)∙sin(2π /k)> z2 + 2; (6) если количество сателлитов k = 3, то (21 + 32) ∙ 0,866 > 32 + 2; или 45 > 34. Условие соседства планетарной однорядной передачи от солнца к водилу при заторможенном эпицикле выполняется. Проверяем планетарную однорядную передачу от солнца к водилу при заторможенном эпицикле на выполнения условия сборки: z1 + z3 = γk;(7) где γ = (z1 + z3)/k; подставляем числовые значения γ= (21 + 84)/3 = 35 В итоге условие сборки планетарной однорядной передачи от солнца к водилу при заторможенном эпицикле выполняется, поскольку γ = 35, т.е. число целое. Вывод: кинематический синтез зубчатого механизма показал, что передаточное отношение планетарной передачи (1 - Н) от солнца к водилу при заторможенном эпициклеобеспечивается при условий соосности, соседства и сборки, если числа зубьев равны: z1 = 21; z2 = 32; z3 = 84; z4=30; z5=60 2.2 Кинематический анализ рычажного механизма Основными задачами кинематического анализа механизмов являются определение положений звеньев и построение необходимых траекторий их точек; определение линейных скоростей и ускорений звеньев. Для большинства механизмов характерно периодическое движение. Под периодом подразумевается промежуток времени, по истечении которого механизм возвращается в исходное положение и его кинематические параметры принимают первоначальное значения. Поэтому кинематическое исследование механизмов ограничим пределами только одного периода. Данное исследование проведем графоаналитическим методом. 2.2.1 Определение положений звеньев механизма Чертеж, представляющий собой ряд последовательных положений звеньев механизма, соответствующих полному циклу его движения, называют планом положений рычажного механизма. Выбираем масштаб длин μL =1000 мм/м. (Лист 1, ГЧ); намечаем неподвижные точки рычажного механизма (точка О и С). Делим траекторию точки А на 12 равных частей и затем по способу засечек проводим разметку траектории точек В и Е.Максимальное перемещение точки Е по горизонтали и вертикали указаны на чертеже. Таким образом проверяем, что условие проворачиваемости рычажного механизма выполняется. 2.2.2 План скоростей для третьего положения механизма План скоростей строим по предварительно вычисленной скорости точки Апо формуле (7): VА = R· ω1,м / с (7) Подставляем числовые значения: VА = 0,055 м· 30 с-1= 1.65 м / с Выбираем масштаб скоростей µv =25 мм/м/с и определяем отрезок Vа: Vа= 1.35 м / 25 мм/м/с = 54 мм Скорости точек В и Е определяем путем решения следующих уравнений: Из плана скоростей вычисляем: VВ = Vb/ µv = 100 мм / 25 мм/м/с = 4 м/с; VВА = Vba/ µv = 40 мм / 25 мм/м/с = 1,6 м/с; VЕ = Ve/ µv = 65 мм / 25 мм/м/с = 2,6 м/с; VEА = Vea/ µv = 48 мм / 25 мм/м/с = 2 м/с; Определяем угловую скорость шатуна: ω ВА = VВА / ВА = 1,6 м/с / 0,064 м = 8 с-1 ω ЕА = VвЕ/ ВЕ = 2 м/с / 0,25 м = 8 с-1 Результаты скоростей для третьего положения механизма сводим ниже в таблицу 1 Таблица 1- Скорости точек рычажного механизма, [м / с]
2.2.3 План ускорений для третьего положения механизма Для построения плана ускорений определяем величину ускорения точки Апо формуле (8): αА = R· ω2, м / с2 (7) Подставляем числовые значения: αА = 0,055 м· (50 с-1)2= 50 м / с2 Выбираем масштаб ускорений µa =2 мм/м/с2 и определяем отрезок αа: αА= 50 м / с2 2 мм/м/с2 = 25 мм Ускорение точки В определяем путем решения векторного уравнения: где нормальная составляющая ускорения αВА определяется по формуле (8)  = ВА· (ωВА)2, м / с2 = ВА· (ωВА)2, м / с2Подставляем числовые значения: В масштабе ускорений µa = 2 мм/м/с2 и определяем отрезок: αва= 12 м / с2 2 мм/м/с2 = 6 мм Из плана ускорений вычисляем: αВ = αb/ µа =110 мм / 2 мм/м/с = 55 м/с2; Ускорение точки Е определяем путем решения векторного уравнения: где нормальная составляющая ускорения определяется по формуле (7) Подставляем числовые значения:  = 0,25 м· (8 с-1)2= 16 м / с2 = 0,25 м· (8 с-1)2= 16 м / с2В масштабе ускорений µa =2 мм/м/с2 и определяем отрезок: αев= 16 м / с2·2 мм/м/с2 = 8 мм Из плана ускорений вычисляем: αЕ = αе/ µа = 40 мм / 2 мм/м/с = 60 м/с2; Из плана ускорений вычисляем ускорение центра тяжести S2 шатуна: αs= αs/ µа = 110 мм / 2мм/м/с = 55м/с2 Результаты ускорений для третьего положения механизма сводим ниже в таблицу 2 Таблица 2 - Ускорение точек рычажного механизма, [м / с2]
2.2.4 Построение кинематической диаграммы рычажного механизма Путем графического дифференцирования функции SЕ = f (φкр) строим график скорости VЕ = f (φкр)(Лист 2, ГЧ). Скорость точки в рассматриваемый момент времени пропорциональна тангенсу угла наклона касательной в соответствующих точках кривой диаграммы перемещений. Поскольку скорость точки Е в третьем положении механизма VЕ = 2,6 м/с (Таблица 1), а на графике скорости VЕ = f (φкр) она соответствует 9 мм, максимальная скорость согласно графику будет в шестом положении механизма измеряем 116 мм, тогда Vmax= 2,6 м/с· 116 мм / 9 мм = 34 м/с Далее методом графического дифференцирования функции VЕ = f (φкр) строим график ускорений αЕ = f (φкр). Ускорение точки в рассматриваемый момент времени пропорциональна тангенсу угла наклона касательной в соответствующих точках кривой диаграммы скоростей. Поскольку ускорение точки Е в третьем положении механизма равно αЕ = 60 м/с2 (Таблица 2), а на графике ускорений αЕ = f (φкр)оно соответствует 5 мм, то максимальное ускорение согласно графику будет в шестом положении механизма, измеряем его 58 мм и вычисляемαmax= 60 м/с· 58 мм / 5мм = 696 м/с2. Вывод: метод графического дифференцирования широко применяется для кинематического исследования механизмов. Анализ графиков позволяет судить о динамических нагрузках, возникающих в механизме, а следовательно, о надежности механизма. Избежать ударов в механизмах можно лишь тогда, когда ускорение звеньев на кинематической диаграмме изменяется плавно. 3. Силовой анализ рычажного механизма Движение звеньев механизма происходит под действием различных сил. Вопрос об определении сил имеет большое значение при расчетах на прочность отдельных деталей, звеньев и кинематических пар механизмов, расчетах на износ трущихся деталей в кинематических парах, определении потребной мощности, оценки точности механизма, обосновании мощности двигателей автоматики и робототехники, следящих приводов, расчете быстродействия, регулировании скорости движения 3.1 Определение силы инерции Определяем массы звеньев механизма: m1 = g · ОА; m1 = 10 кг/м · 24 · 10-3 м = 0,24 кг; m2= g · АЕ; m2= 10 кг/м · 25 · 10-3 м = 0,25 кг; m3= g · ВС; m3= 10 кг/м · 60 · 10-3 м = 0,6 кг; Определяем силы тяжести звеньев механизма: G1=m1g; G1=0,24 кг · 9,81 м/с2=2,3 Н; G2=m2g; G2=0,25 кг · 9,81 м/с2 = 2,4 Н G3=m3g; G2=0,6 кг · 9,81 м/с2 = 5 Н Определяем силы инерции второго звена механизма: Fu2= m2·αs;Fu2= 2,4 кг·37,2м/с2 = 89,28 Н 3.2 Определение усилий в кинематических парах Исследуемый механизм состоит из последовательно соединенных ведущего звена механизма (0 – 1) и присоединенной группы Ассура (3 - 2).Силовой расчет производим в обратном порядке кинематическому расчету. Выделяем группу (3 – 2) и прикладываем все действующие на нее силы: Неизвестную силу ∑ M(А)= - Fс·h1- Fu2·h3 + G2 ·h2+Fu3h5 + G3 ·h4– R03 ·h6= 0.  Выбрав масштаб сил µF= 1.5 мм/Н, строим план сил. Из плана сил определяем силы реакции: R12 n= R12 t= 3.3 Кинетостатика кривошипа Кривошип находится в равновесии под действием сил: Выбрав масштаб сил µF= 1.5 мм/Н, строим план сил. Из плана сил определяем силы реакции: R01n= R01t= Определяем фиктивную (условно приложенную) уравновешивающую силу Pyиз уравнения моментов: ∑ M(О)=R21t·h21- Py·h21= 0, Py= R21t = 36 Н Определяем уравновешенный момент, приложенный к кривошипу: Му= Py·h21; Му= 36 Н·0,060 м = 2,16 Н·м; Определение потребной мощности привода Требуемая мощность на валу кривошипа определяется как произведение уравновешенного момента на угловую скорость кривошипа, поскольку уравновешенный момент развивается двигателем и обеспечивает заданное движение входного звена: Nкр= Му·ω1 ; Nкр= 2,16 Н·м · 30 с-1 =65 Вт · Мощность приводного двигателя: N=Nкр / ηзп, где ηзп= 0,9 - коэффициент полезного действия зубчатой передачи N=65 Вт / 0,9 = 73 Вт, Вывод: Потребная мощность двигателя заданной машины должна быть не меньше 0,073 кВт Заключение Курсовой проект посвящен структурному, кинематическому и силовому анализу механизма.Большое место в работе уделено графоаналитическим методам кинематического исследования механизма; методу графического дифференцирования, навыку выполнения математических расчетов; построению с помощью методов планов для конкретного мгновенного значения времени, планов положений, скоростей и ускорений точек звеньев механизма. Шарнирный четырехзвенник применяют для преобразования вращательного в любое движение с требуемыми параметрами. Наибольшее распростроение получили плоские четырехзвенные механизмы с тремя подвижными и одним неподвижным звеньями. «Родоначальником» этой группы является шарнирный четырехзвенник, служащий для преобразования равномерного вращения ведущего звена в неравномерное вращение ведомого звена. Список использованных источников Бурчак, Г.П. Теоретическая механика [Электронный ресурс] : учеб.пособие / Г.П. Бурчак, Л.В. Винник - М.: НИЦ ИНФРА-М, 2015. - 271 с. - (Высшее образование: Бакалавриат) . Богомаз, И. В. Механика [Электронный ресурс] : учеб.пособие / И. В. Богомаз. - Красноярск: Сиб. федер. ун-т, 2012. - 346 с. Диевский, А. В. Теоретическая механика [Электронный ресурс]. Курс лекций / А. В. Диевский. - Лань, 2009. – 320 с. Лабунцев, Д. А. Механика двухфазных систем [Электронный ресурс] :учеб. пособие для вузов / Д. А. Лабунцев. – 2-е изд., перераб. и доп. М.: Издательский дом МЭИ, 2007. – 384с. Механика: Учебное пособие для вузов / В.Т. Батиенков, В.А. Волосухин, С.И. Евтушенко, В.А. Лепихова. - М.: ИЦ РИОР: ИНФРА-М, 2011. - 512 с.: 60x90 1/16. - (Высшее образование). (переплет) ISBN 978-5-369-00757-0 http://znanium.com Методические рекомендации для проведения практических занятий по дисциплине «Механика» / Т.А. Посягина; Кумертауский филиал ОГУ – Кумертау: Кумертауский филиал ОГУ, 2016. – 27 с. Методические рекомендации для проведения лабораторных работ по дисциплине «Механика» / Т.А. Посягина; Кумертауский филиал ОГУ – Кумертау: Кумертауский филиал ОГУ, 2016. – 54 с. Методические указания к выполнению курсового проекта дисциплины «Механика» / Т.А. Посягина; Кумертауский филиал ОГУ – Кумертау: Кумертауский филиал ОГУ, 2016. – 21 с. Механика. Основы расчёта и проектирования деталей машин [Электронный ресурс] : учеб.пособие / В.А. Жуков, Ю.К. Михайлов. - М.: НИЦ ИНФРА-М, 2014. - 349 с. - (Высшее образование:Бакалавриат). ISBN 978-5-16-009218-8. Теоретическая механика : учебник / В. Л. Цывильский. — 4-е изд., перераб. и доп. — Москва: Курс Инфра-М, 2015. — 368 с.: ил. — Библиогр.: с. 365. Техническая механика. Курсовое проектирование : учебное пособие для вузов / С. П. Волков. — Старый Оскол: ТНТ, 2013. — 150 с.: ил. — Библиогр.: с. 150. | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||