Лабораторная работа 1 Цель работы
 Скачать 1.08 Mb. Скачать 1.08 Mb.
|

|
Радиотехнические системы передачи информации Лабораторная работа №1 Цель работы: Изучить вероятности ошибок принимаемого двоичного цифрового сигнала в зависимости от вида модуляции. Сделать выводы о помехоустойчивости различных видов модуляции. Дать рекомендации по использованию модуляций для передачи цифровых сигналов. Виды модуляции изучаемых двоичных цифровых сигналов: амплитуд-ная (АМ), частотная (ЧМ), фазовая (ФМ) относительная фазовая модуляция (ОФМ) показаны на рис. 1. 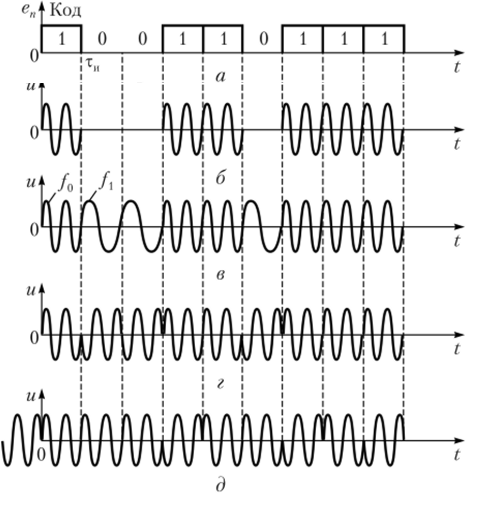 Рисунок 1 На рис.1 показаны: видеоимпульсы Uцс -передаваемого двоичного цифрового сигнала, и радиосигналы при использовании АМ, ЧМ, ФМ и ОФМ. видеоимпульсы поступают на один из модуляторов, показанных на рис. 2 при использовании АМ и ФМ на одной частоте. При использовании ЧМ используются две разные частоты f1 и f2, которые должны быть выбраны, чтобы отсутствовали разрывы фазы при модуляции. Для этого они должны быть кратны тактовой частоте передаваемого ЦС:  , (1) , (1)T – длительность единичных импульсов 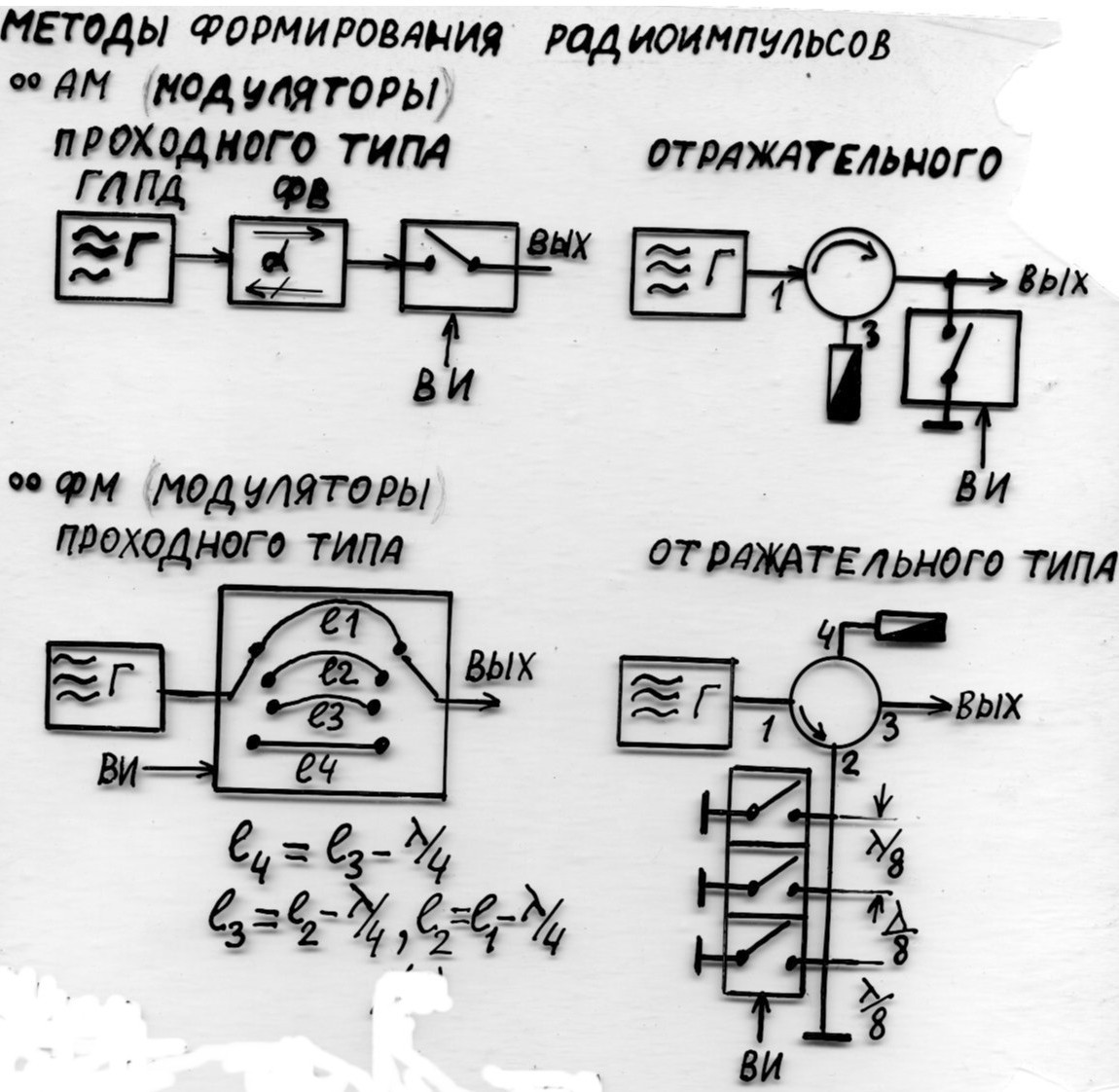 Рис. 2. На рис. 2 показаны: Г – генератор несущей частоты радиосигнала (РС), ФВ – ферритовый вентиль, ГЛПД – генератор на лавинно пролетном диоде, ферритовый циркулятор. Управление коммутаторами осуществляется видеоимпульсами. В модуляторах АМ проходного типа коммутация осуществляется подключением выхода к генератору при передаче единичного значения цифрового сигнала и разрыва этого подключения при передаче нулевого значения цифрового сигнала. В модуляторах АМ отражательного типа цепь коммутатора отключается от земли при передаче единичного значения цифрового сигнала, и замыкается на землю при передаче нулевого значения ЦС. Аналогично работают четырехпозиционной ФМ путем изменения расстояния, проходимого сигналом на величину кратную четверть длины волны  электрических колебаний Г, соответствующих изменениям фазы колебаний генератора кратные 900. Для отражательного типа ФМ изменение достигается изменением точки отражения от земли сигнала в прямом и обратном направлении. Разделение сигналов прямого и отраженного сигналов, поступающего на выход модулятора, осуществляется ФВ. Полученные сигналы передаются и поступают вход приемника с полосой пропускания ВЧ сигнала: электрических колебаний Г, соответствующих изменениям фазы колебаний генератора кратные 900. Для отражательного типа ФМ изменение достигается изменением точки отражения от земли сигнала в прямом и обратном направлении. Разделение сигналов прямого и отраженного сигналов, поступающего на выход модулятора, осуществляется ФВ. Полученные сигналы передаются и поступают вход приемника с полосой пропускания ВЧ сигнала:  (1.1) (1.1)В приемнике образуются шумы с нормальным распределением, спектральная плотность мощности которой равна:  K T, (1.2) K T, (1.2)где K=1,38 10-11 нВт/Гц Ko – постоянная Больцмана, Ko-градусы Кельвина, Т – суммарная температура шумов приемника и направления, откуда принимается радиосигнал. В околоземном космическом пространстве минимальное значение Т без учета шумов приемника ниже 1,5 Ko не найдена. Для исследования помехоустойчивости при использовании вероятности ошибок применяется следующая функция плотности нормального распределения случайной величины t:  . (1.3) . (1.3)Вероятность нахождения случайной величины на интервале от  определяется интегралом: определяется интегралом: , (1.4) , (1.4) соответствующей функции Матлаба   , которая используется в программах (ПР) для расчета вероятности ошибок цифрового сигнала. Графики использованных функций в (1.4) и (1.5) показаны на рис. 3 и 4 в виде индексированных кривых, индекс которых является величиной их аргумента. Отметим, что при проведении исследования помехоустойчивости в используются другая функция, которая связана с введенной функцией уравнением: , которая используется в программах (ПР) для расчета вероятности ошибок цифрового сигнала. Графики использованных функций в (1.4) и (1.5) показаны на рис. 3 и 4 в виде индексированных кривых, индекс которых является величиной их аргумента. Отметим, что при проведении исследования помехоустойчивости в используются другая функция, которая связана с введенной функцией уравнением: (1.5) (1.5)для определения: малых ВО 10-6 в при средних условиях распространения радиосигналов (РС) на трассах и 10-3 при замираниях РС. Удобство использования функции  заключается в том, что она непосредственно определяет ВО за счет выбросов шумов на интервале от заключается в том, что она непосредственно определяет ВО за счет выбросов шумов на интервале от  , которые превышают порог срабатывания решающего устройства (РУ) x, согласно равенству , которые превышают порог срабатывания решающего устройства (РУ) x, согласно равенству (1.6) (1.6)Иногда для расчетов ВО используется первый член асимптотического разложения функции в ряд: , (1.7) , (1.7)показанный на рис. 4 кривой  , которая исполльзуется в ЛР 2с некоторыми модификациями. Согласно (1.4) –(1.6) график функции в ПР на Рис. 3 и далее описывается уравнением , которая исполльзуется в ЛР 2с некоторыми модификациями. Согласно (1.4) –(1.6) график функции в ПР на Рис. 3 и далее описывается уравнением (1.8) (1.8)показанный кривой Q. На рис. 4 график кривой Qa2 соответствует использованию первого и второго членов ряда (1.7). Для удобства сравнения используется аргумент в дБ, определяемый  График График  соответствует использованию первых четырех членов ряда. Все кривые сливаются практически в одну при значениях аргумента более 6дБ. соответствует использованию первых четырех членов ряда. Все кривые сливаются практически в одну при значениях аргумента более 6дБ.   Рис. 3 Для меньших значений аргумента кривые различаются. Для их анализа на Рис. 4 используется расположенный ниже второй график для значений аргументов менее 5дБ. Для различения кривых дополнительно в ПР на Рис. 4.вводятся функции из разницы с кривой Q:  (1.9) (1.9) (1.10) (1.10)Поскольку графики построены для положительных величин и  кривая кривая  определяется (1.9). Для кривой определяется (1.9). Для кривой  берется другая разность поскольк берется другая разность поскольк . В добавок для аргументов . В добавок для аргументов  кривая кривая  меняет знак на отрицательный, что видно из кривой меняет знак на отрицательный, что видно из кривой  Аналогично перемена знака происходит для кривой Аналогично перемена знака происходит для кривой  Для показа этих особенностей в ПР использовано 20 тысяч точек расчета аргумента. Для показа этих особенностей в ПР использовано 20 тысяч точек расчета аргумента.   Рис. 4 Для устранения операций деления на ноль в расчеты для аргумента t при нулевом значении аргумента добавлена единица. Из всех членов ряда (1.7) только кривая остается положительной для значений  и точность расчета по ней выше при и точность расчета по ней выше при  , чем при использовании , чем при использовании  Однако при Однако при  погрешность расчета с использованием погрешность расчета с использованием  становиться менее 1%. Тогда как при использовании становиться менее 1%. Тогда как при использовании  погрешность расчетов составляет 10%.Приравнивание знаменателя в (1.7) 2 ( погрешность расчетов составляет 10%.Приравнивание знаменателя в (1.7) 2 ( приводит к увеличению ВО примерно на порядок по величине, что соответствует увеличению аргумента на 0,5 дБ, что иллюстрируется кривой Qa1, используемой в ЛР 2. приводит к увеличению ВО примерно на порядок по величине, что соответствует увеличению аргумента на 0,5 дБ, что иллюстрируется кривой Qa1, используемой в ЛР 2.Приведем уравнения для расчета ВО ЦС при использовании когерентного приема радиосигналов из [1-3] и (1.4) и (1.5) :  ), (1.11) ), (1.11)где n отношение мощностей сигнала и шума (ОСШ) на входе РУ. Для: ФМ а = 2, ЧМ а = 1, ФМ а = 1/2. Уравнение (1.11)получено при одинаковой вероятности символов ЦС 1 и 0 равной 0,5. Расчеты, приведенные по (1.11), показаны на Рис. 1.5. Отметим, что при переходе к расчетам ПУ на Рис. 5 был сделан переход к мощностям, что привело к появлению квадратных корней в аргументах функций ВО и соответствующим расчетам децибел для оси х на графике Рис. 1.5. Отметим, что использование когерентного метода приема предполагает усложнение приемной аппаратуры, связанное с выделением несущей частоты радиосигнала. Особенно это затруднено для ФМ, т.к. требуется умножение частоты радиосигнала в 2 раза для устранения фазовой модуляции и последующего деления ее также в 2 раза. При этом может возникнуть фазовый сдвиг синхронного сигнала на  , что вызовет ошибки в принимаемой цифровой последовательности на обратные, для устранения которых требуется контроль принимаемого сигнала и сравнение его с передаваемым, что усложняет аппаратуры и требует увеличение количества передаваемой информации для введения контрольных сигналов. От этого недостатка свободна АМ, в при которой требуется только фильтрация несущей радиосигнала. Преимуществом когерентных способов передачи является снижение мощности помех на выходе детектора за счет подавления ортогональной составляющей шумов. , что вызовет ошибки в принимаемой цифровой последовательности на обратные, для устранения которых требуется контроль принимаемого сигнала и сравнение его с передаваемым, что усложняет аппаратуры и требует увеличение количества передаваемой информации для введения контрольных сигналов. От этого недостатка свободна АМ, в при которой требуется только фильтрация несущей радиосигнала. Преимуществом когерентных способов передачи является снижение мощности помех на выходе детектора за счет подавления ортогональной составляющей шумов. Самой низкой ПУ обладает АМ, поскольку порог РУ должен быть установлен на уровне половинного значения амплитуды сигнала на выходе детектора. РУ принимает решение о том, какой сигнал принимается 1 или 0. Выбросы шумов вызывают ошибки (О) РУ. 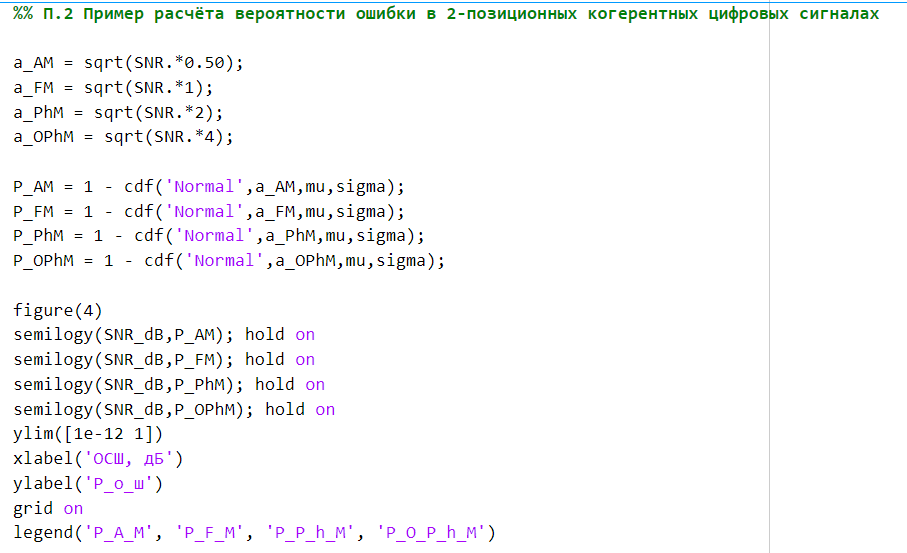  Рис. 5 Самой высокой ПУ обладает ФМ, вызванное увеличением напряжения в 2 раза между уровнями сигнала 1 и 0 по сравнению с АМ. При использовании двухпозиционной ФМ напряжение радиосигнала описывается уравнением U sin(ω t + θ), где  принимает значения 00 или 1800. Соответственно напряжение сигнала на выходе фазового детектора будет равно U при 00 –U при 1800. Порог РУ устанавливается равным нулевому напряжении сигнала на выходе фазового детектора. Следовательно ПУ ФМ по сравнению с АМ увеличивается на 6дБ, что видно из графиков на рис. 1.5. При использовании ЧМ используются ортогональные сигналы на выходе детектора 1 и 0, что приводит к уменьшению расстояния между ними в принимает значения 00 или 1800. Соответственно напряжение сигнала на выходе фазового детектора будет равно U при 00 –U при 1800. Порог РУ устанавливается равным нулевому напряжении сигнала на выходе фазового детектора. Следовательно ПУ ФМ по сравнению с АМ увеличивается на 6дБ, что видно из графиков на рис. 1.5. При использовании ЧМ используются ортогональные сигналы на выходе детектора 1 и 0, что приводит к уменьшению расстояния между ними в  по сравнению в ФМ и уменьшению помехоустойчивости на 3дБ, как показано в ПР на рис. 1.6: 10log(nf/nh)=3.01. по сравнению в ФМ и уменьшению помехоустойчивости на 3дБ, как показано в ПР на рис. 1.6: 10log(nf/nh)=3.01. При использовании первого члена асимптотического ряда (1.7) можно (1.11) записать в виде:  , (1.12) , (1.12)которое будет использовано в лабораторной работе (ЛР) 2. Расчёт шумовой температуры приёмника и требуемой мощности на входе приёмника для различных видов модуляции. 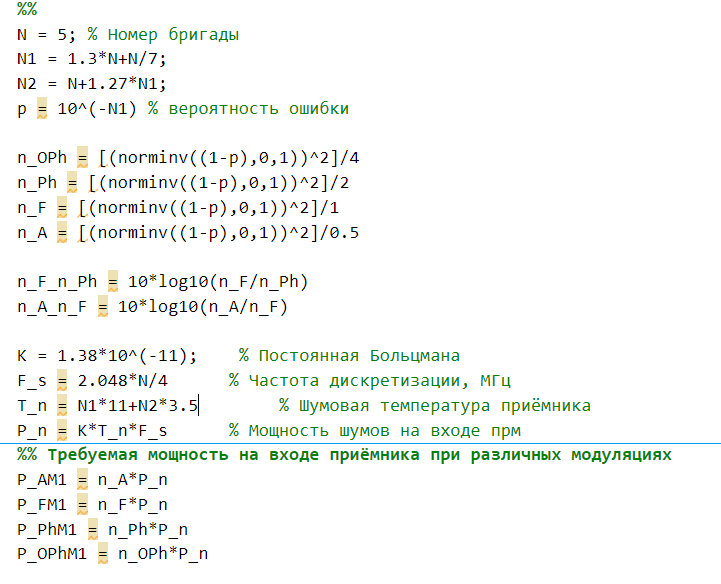 Записать полученные значения шумовой температуры приёмника, мощности шума на входе приёмника и требуемой мощности сигнала на входе приёмника для различных видов модуляции. |