Лабораторная работа №10 ЭПА. ЛР10. Лабораторная работа 10. Исследование статики и динамики системы стабилизации скорости двигателя с электромашинным усилителем
 Скачать 2.61 Mb. Скачать 2.61 Mb.
|

|
М  ИНОБРНАУКИ РОССИИ ИНОБРНАУКИ РОССИИФедеральное государственное бюджетное образовательное учреждение высшего образования «Самарский государственный технический университет» (ФГБОУ ВО «СамГТУ») Кафедра «Электропривод и промышленная автоматика» Лабораторная работа №10. ИССЛЕДОВАНИЕ СТАТИКИ И ДИНАМИКИ СИСТЕМЫ СТАБИЛИЗАЦИИ СКОРОСТИ ДВИГАТЕЛЯ С ЭЛЕКТРОМАШИННЫМ УСИЛИТЕЛЕМ Работу выполнил: Студент 3-ЭТФ-6 Горбунов А.А Назимов Н.Д Гордеев Л.Ю Харитонов М.Л Горюнов В.Ю Работу проверил: Курган В.П Самара 2022 г. Цель работы – практическое изучение электропривода, собранного по схеме ЭМУ – Д объекта автоматического управления в статических и динамических режимах работы, сопоставление материалов экспериментов с результатами теоретических исследований.   На рис. 2 приняты обозначения: Uзс - напряжение задатчика скорости; Uос - напряжение обратной связи по скорости; U - напряжение сигнала ошибки; Uя - напряжение на якоре двигателя М1; Мс - статический момент нагрузки; Iс - статический ток якоря; - скорость двигателя; - изменение скорости, вызванное моментом нагрузки; kэ - коэффициент передачи ЭМУ; kос - коэффициент передачи обратной связи; см - коэффициент передачи, связывающий момент и ток нагрузки; ДУ k , ДВ k - коэффициент передачи двигателя, соответственно, по управляющему и возмущающему воздействиям; Тм - электромеханическая постоянная времени двигателя; Описание лабораторной установки электромашинной системы стабилизации скорости Принципиальная электрическая схема лабораторной установки представлена на рис. 3:  В лабораторной установке системы автоматической стабилизации скорости вращения двигателя постоянного тока М1 типа П22 в качестве силового усилителя мощности использован электромашинный усилитель G1 типа ЭМУ - 12А. ЭМУ приводится во вращение гонным асинхронным двигателем М2 типа АО - 21/4. Напряжение питания на гонный двигатель М2 подается от сети переменного тока 220 В через силовую коммутирующую аппаратуру, а именно автомат F1 и магнитный пускатель KM, который включается кнопочной станцией SB1 - SB2. При включении автомата F1 одновременно подается напряжение на выпрямитель схемы Ларионова UZ1, питающий задающий потенциометр R1 и балластное сопротивление R7, которое можно закорачивать тумблером S3. Кнопка SB3 в цепи питания задатчика скорости R1 служит для создания скачкообразного управляющего воздействия. На обмотке управления ЭМУ L1G1 происходит электрическое суммирование задающего сигнала и сигнала обратной связи. Задающий сигнал через переключатель S1 подается с потенциометра R1. Сигнал обратной связи снимается с потенциометра R3, предназначенного для регулирования глубины обратной связи. Цепочка резистора R2 и стабилитронов VD1, VD2 образует узел ограничения входного сигнала. Ток в цепи задатчика скорости контролируется амперметром PA1, величина напряжения сигнала ошибки - вольтметром PV1, а напряжения сигнала обратной связи - вольтметром PV2. Для введения обратных связей по различным координатам системы управления служит галетный переключатель S2. При положении «0» переключателя S2 получается схема разомкнутой системы, при положении «1» - собирается система с обратной связью по напряжению двигателя M1, при положении «2» - система регулирования с обратной связью по противо э.д.с. с помощью тахометрического моста, а в положении «3» - система автоматического регулирования с обратной связью по скорости с помощью тахогенератора BR типа ТМГ - 1. При этом напряжение на двигателе M1 контролируется вольтметром PV3, напряжение тахомоста - вольтметром PV4, а напряжение тахогенератора BR - вольтметром PV5. Якорная цепь двигателя M1 и ЭМУ - G1 замыкается переключателем Q1, а ток в ней контролируется амперметром PA2. Двигатель M1 нагружается нагрузочной машиной G2, которая получает питание по якорной цепи от тиристорного тормозного устройства UZ2 через переключатель Q3, служащий для переключения ее режима работы. В положении «согласованно» G2 создает момент согласно с моментом M1, а в положении «встречно» - встречно, в результате изменения полярности напряжения UZ2 на якоре G2. Тиристорное тормозное устройство UZ2 подключается к сети переменного тока 220В. автоматом F3. Регулировка напряжения UZ2 осуществляется потенциометром R6. Якорный ток 5 электромашины контролируется амперметром PA3. Обмотки возбуждения двигателя M1, тахогенератора BR и нагрузочной машины G2 подключаются к сети постоянного тока 110В автоматом F2, а напряжение на них контролируется вольтметром PV6. Автоматическое ограничение тока в якорной цепи и момента, развиваемого двигателем M1, осуществляется за счет действия задержанной отрицательной обратной связи по току якоря. В исследуемой системе такая связь реализована посредством шунтирования компенсационной обмотки ЭМУ L2G1 кремневыми стабилитронами VD3,VD4. Данные электрических машин, использованных в лабораторной установке приведены в таблице 1. Экспериментальное определение коэффициента передачи разомкнутой системы kp
 Uос Uб    По данным таблицы построить график зависимостей Uoc от Uoc, определить глубину обратной связи по формуле:  kp =  Экспериментальное определение электромеханической постоянной времени двигателя ТМ  Tm =  Аналитическое и экспериментальное определение постоянной времени замкнутой системы ТЗ Тз.т =  Тз.е=  Экспериментальное определение коэффициента передачи двигателя по управляющему воздействию kДУ и возмущающему воздействию kДВ и сопротивления якорной цепи RЯЦ
 kДУ = 
ω Iя 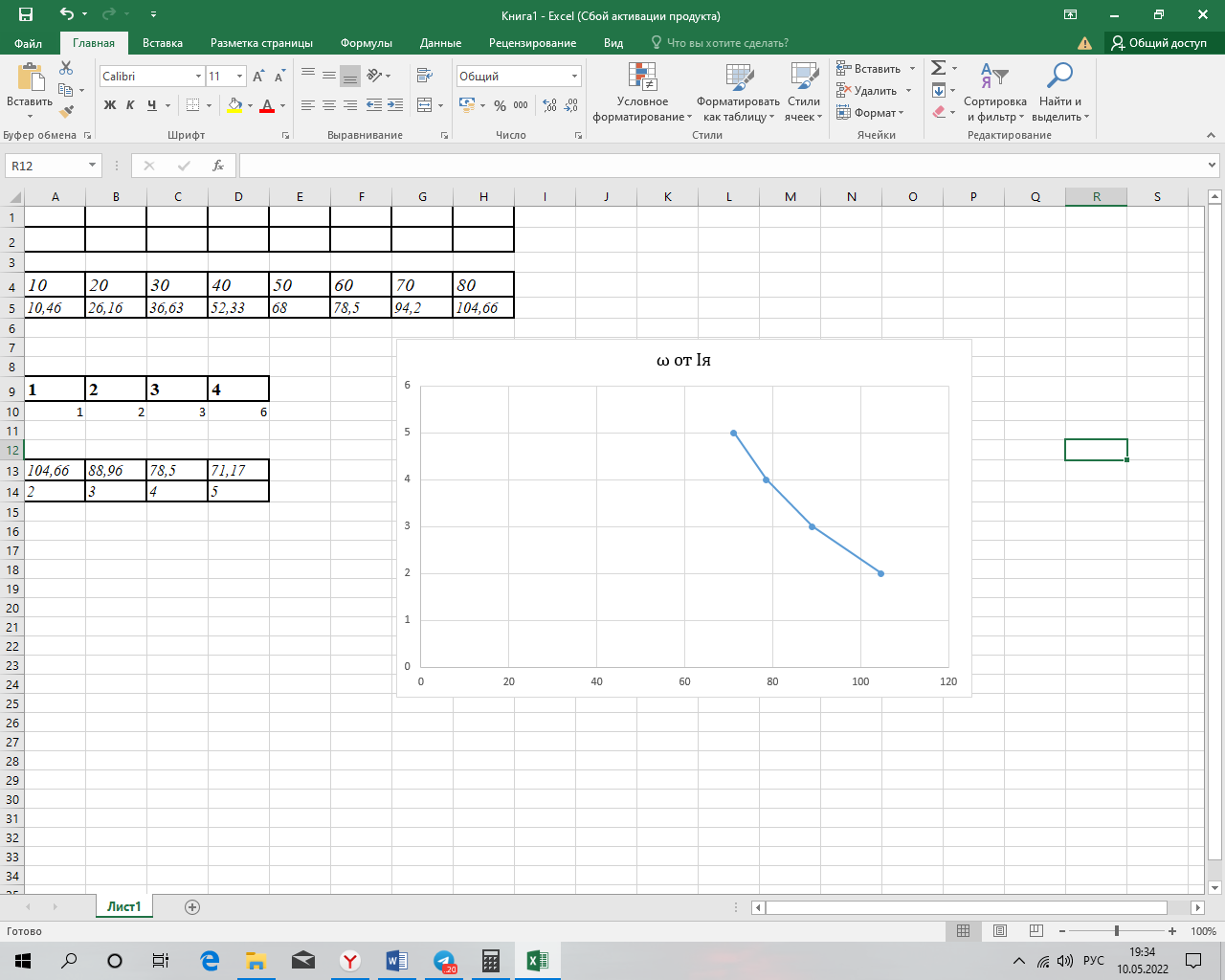 Iя Uя  Кдв =  Rяц = 10,66 Кдв = 14,32 Аналитическое и экспериментальное определение коэффициента передачи замкнутой системы автоматической стабилизации скорости по возмущающему воздействию kВ K в.т = 
Iя ω  k в.э = 4,18 Вывод по проделанной работе: Мы получили практические знания по работе с электроприводом, собранного по схеме ЭМУ – Д объекта автоматического управления в статических и динамических режимах работы, сопоставили материалы экспериментов с результатами теоретических исследований. Контрольные вопросы: Как коэффициент передачи kp влияет на быстродействие электропривода? Он определяет глубину обратной связи системы Как коэффициент передачи kp влияет на точность стабилизации скорости электропривода? Чем выше коэффициент, тем хуже точность стабилизации скорости электропривода. Какой физический смысл коэффициента передачи kду? Это коэффициент передачи двигателя, соответственно, по управляющему и возмущающему воздействиям Какой физический смысл коэффициента передачи kдв? Это коэффициент передачи двигателя, соответственно, по управляющему и возмущающему воздействиям Какой физический смысл коэффициента передачи kу? Это коэффициент передачи системы автоматической стабилизации скорости по управляющему воздействию Какой физический смысл коэффициента передачи kв ? Это коэффициент передачи замкнутой системы автоматической стабилизации по возмущающему воздействию Как экспериментально определить коэффициент передачи kp ? Он определяется при помощи поворота потенциометра, который задаёт необходимые скорости вращения двигателя, сигналы ошибок и обратной связи контролируются по приборам, далее, исходя из полученных данных, вычисляем коэффициент по формуле. | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
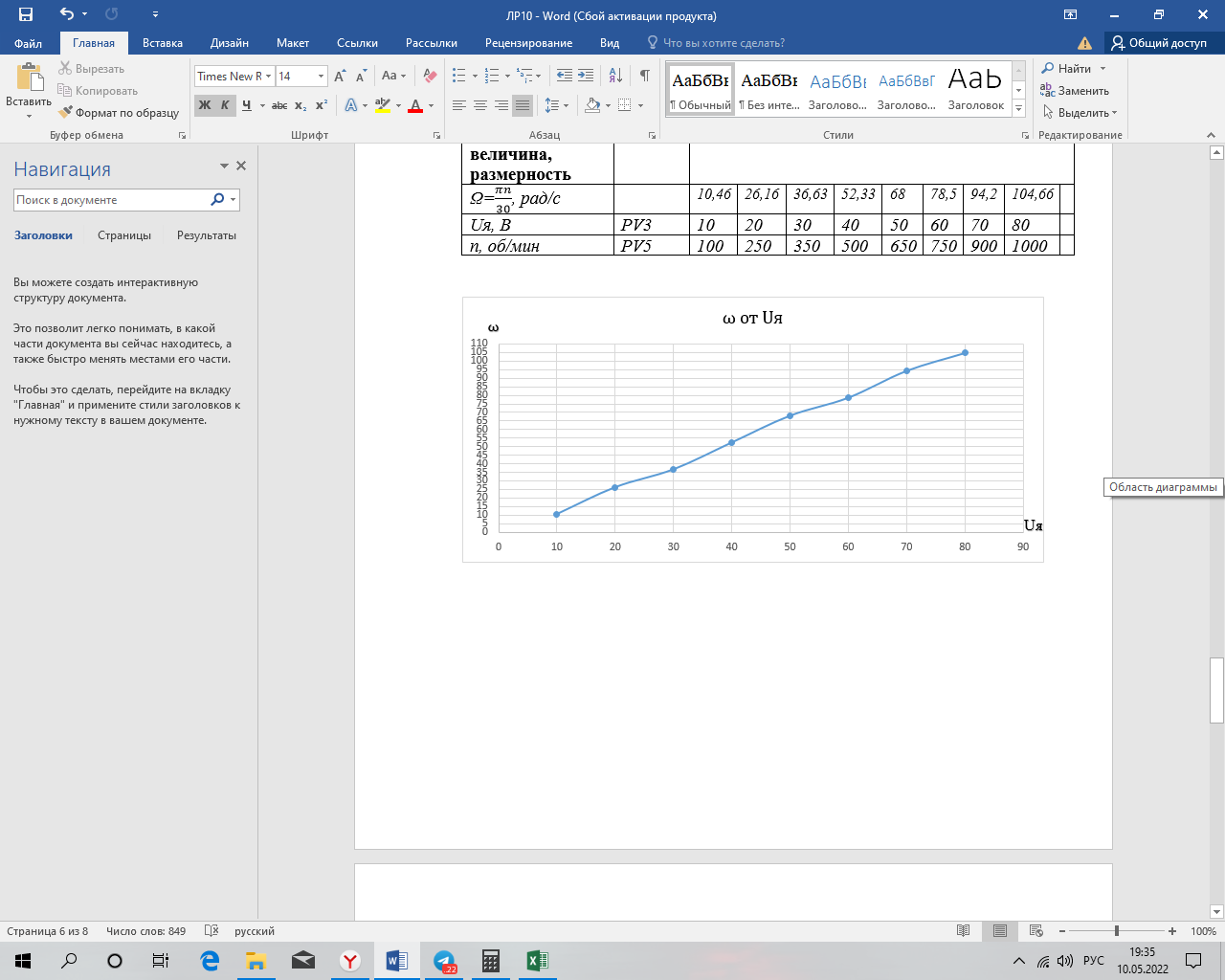
 , рад/с
, рад/с