Лабораторная по Зоориктуеву. Королёв Г.С. АТП-149м Лабораторная Работа №2. Лабораторная работа 2 ст гр. Атп149М Королёв Г. С. Проверила Гончарова С. Г. Цель работы
 Скачать 360.13 Kb. Скачать 360.13 Kb.
|

|
Министерство образования и науки Российской Федерации Федеральное государственное бюджетное образовательное учреждение высшего профессионального образования «УФИМСКИЙ ГОСУДАРСТВЕННЫЙ АВИАЦИОННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ» ИНСТИТУТ АВИАЦИОННЫХ ТЕХНОЛОГИЙ И МАТЕРИАЛОВ Кафедра АТП Лабораторная работа №2 Выполнил: ст. гр. АТП-149М: Королёв Г.С. Проверила: Гончарова С.Г. Цель работы: создание и исследование математической робастной системы. Теоретическая часть: Робастное управление — совокупность методов теории управления, целью которых является синтез такого регулятора, который обеспечивал бы хорошее качество управления (к примеру, запасы устойчивости), если объект управления отличается от расчётного или его математическая модель неизвестна. Главной задачей синтеза робастных систем управления является поиск закона управления, который сохранял бы выходные переменные системы и сигналы ошибки в заданных допустимых пределах несмотря на наличие неопределённостей в контуре управления. Неопределённости могут принимать любые формы, однако наиболее существенными являются шумы, нелинейности и неточности в знании передаточной функции объекта управления. Ход работы: Вводим данные и создаем модель в Simulink >> [A, B, C, D]= tf2ss ([8.64 1080.43],[0.00022 38 4882 30902]); >> B2=B B2 = 1 0 0 >> C2=C C2 = 0 39272.7272727273 4911045.45454546 >> B1=0.2*B B1 = 0.2 0 0 >> C1=0.2*C C1 = 0 7854.54545454546 982209.090909091 >> B=[B1,B2] B = 0.2 1 0 0 0 0 >> [X,L,G]=care(A,B2,C1'*C1,1) X = 0.000162804689184754 28.1208099633465 3434.06639054136 28.1208099633465 4857409.53409568 593179790.700341 3434.06639054136 593179790.700341 72440296927.852 L = -172598.708061147 -121.887905920536 -6.6769230101524 G = 0.000162804689184754 28.1208099633465 3434.06639054136 >> [Y,L1,G1]=care(A',C2',B1*B1',1) Y = 1.15793716882061e-07 7.24959121993508e-19 -5.21806026702107e-15 7.24959121993508e-19 5.2180667253305e-15 4.96473638501649e-22 -5.21806026702107e-15 4.96473638501649e-22 6.41653755920164e-18 L1 = -172598.708061147 -121.887905920626 -6.6769230101336 G1 = -2.5626102647762e-08 2.04930149599403e-10 3.15119271119112e-11 >> A1=A+B2*F2+L2*C2 Undefined function or variable 'F2'. >> F2=-B2'*X F2 = -0.000162804689184754 -28.1208099633465 -3434.06639054136 >> L2=-Y*C2' L2 = 2.56261026847762e-08 -2.04930149599403e-10 -3.15119271119112e-11 >> A1=A+B2*F2+L2*C2 A1 = -172727.272890077 -22190937.2107126 -140467070.304176 1 -8.04816587517657e-06 -0.00100642127968947 0 0.999998762440681 -0.000154756506406919 Модель: 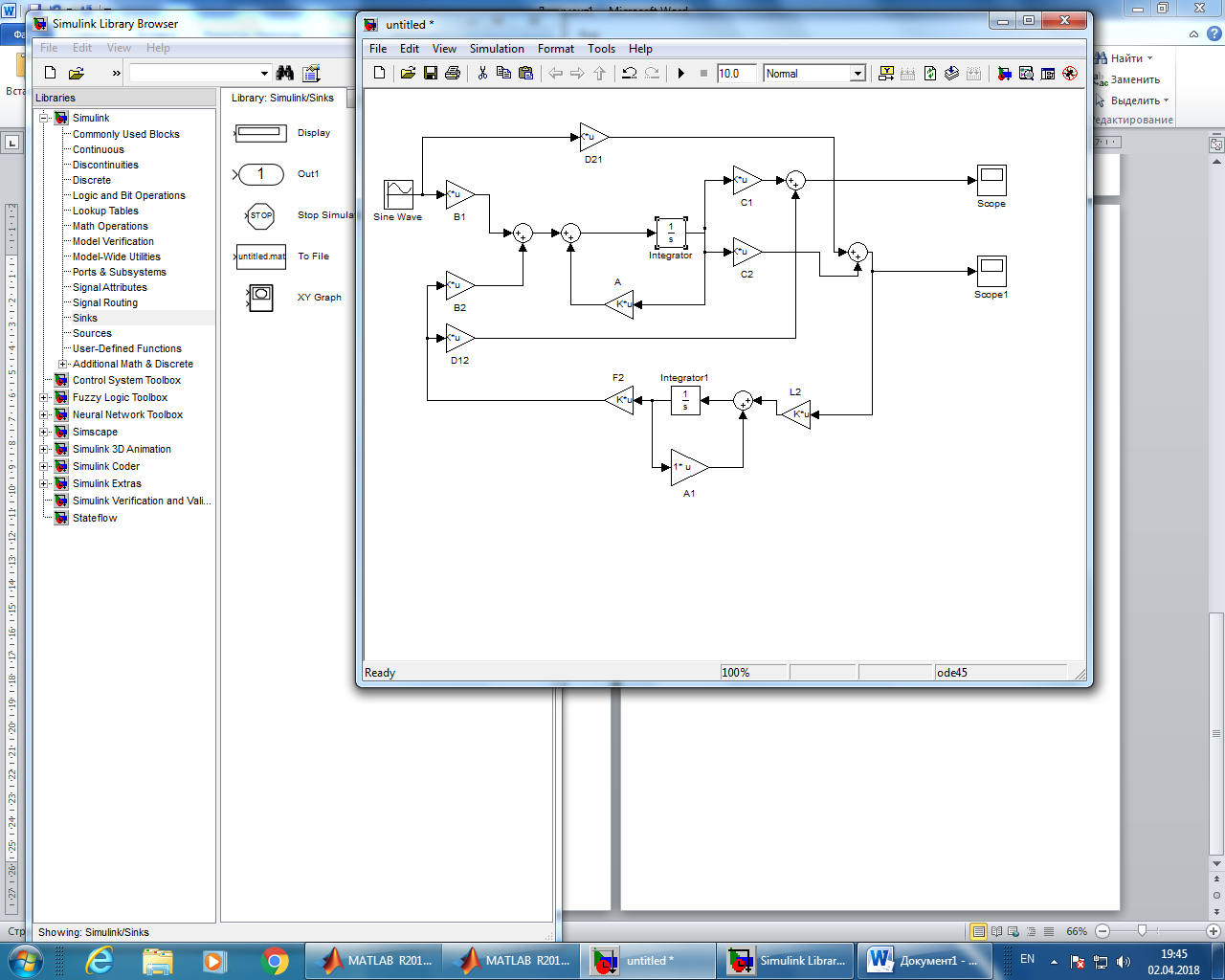 Результаты при амплитуде 500 и частоте 50: 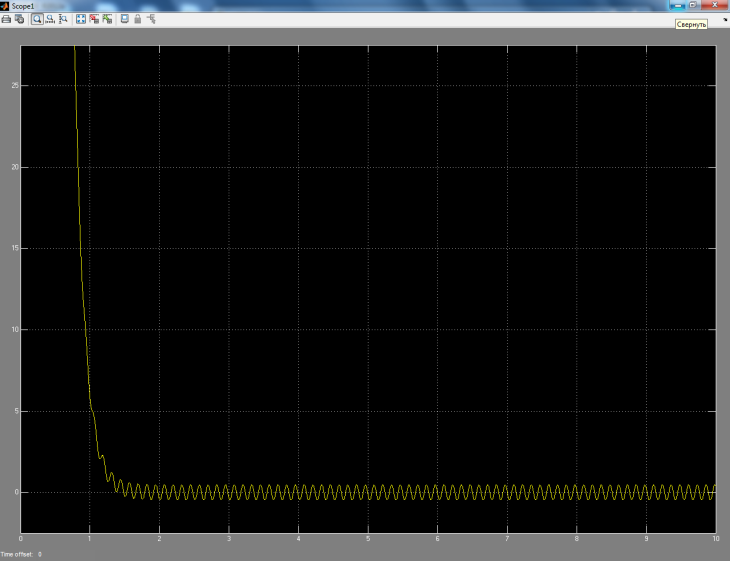 Результаты при амплитуде 500 и частоте 50: 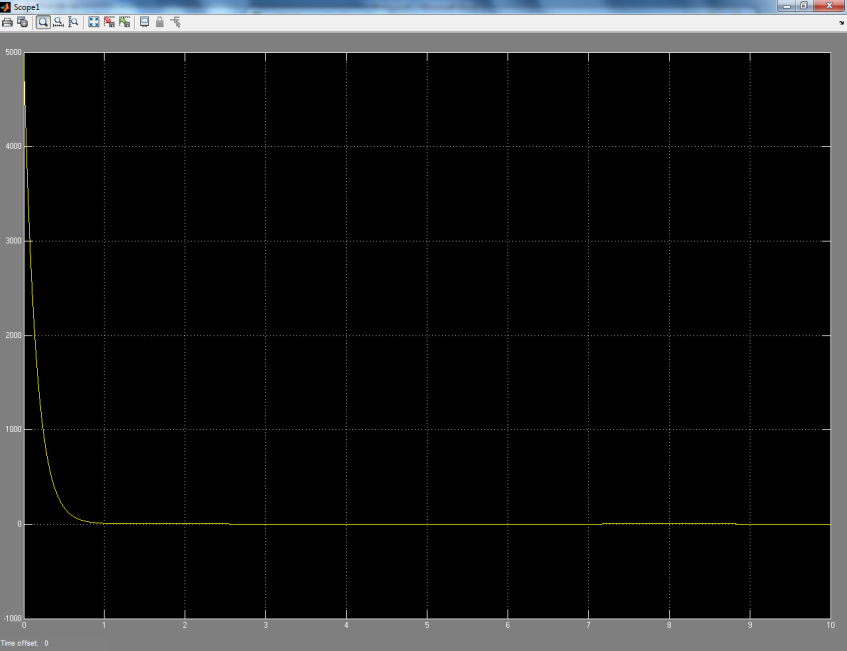 Вывод: в данной лабораторной работе была смоделирована робастная система, обеспечивающая поиск закона управления, который сохранял бы выходные переменные системы и сигналы ошибки в заданных допустимых пределах. Уфа 2020 |