№ 715838 Решение. Метод координат. Его развитие и применение оглавление
 Скачать 245.14 Kb. Скачать 245.14 Kb.
|

|
Метод координат. Его развитие и применение ОГЛАВЛЕНИЕ Введение………………………………………………………………………...3 Глава 1. История возникновения метода координат и его развитие………..4 Глава 2. Координатно-векторный метод решения стереометрических задач ..………................…………………………………………………………….....9 Глава 3. Применение координатного метода………………………………..13 Заключение …………………………………………………………..……..…22 Список использованных источников………………………….……..………23 Введение Координатный метод решения задач на сегодняшний день наиболее мощный и при правильном подходе позволяет решать практически все виды математических, физических, астрономических и технических задач. Однако координатный метод в рамках школьной программы используется довольно ограниченно и неполно. В своей работе я поставил задачу показать, как решаются стереометрические задачи, если на них взглянуть по-другому, то есть рассмотреть задачу в трехмерной системе координат. Предметом исследования является координатно-векторный метод решения стереометрических задач. Задачи исследования: 1) Исследовать историю возникновения координатно-векторного метода обучения решению задач и их развитие; 2) Раскрыть содержание данного метода, рассмотреть основные формулы; 3) Показать применение метода на нетрудных, элементарных задачах, решить факультативные стереометрические задачи с использованием координатно-векторного метода. Глава 1. История возникновения метода координат и его развитие Возникновение в первой половине XVII ст. аналитической теории, установившей связь между алгеброй и геометрией, не было случайным. Оно явилось следствием как развития математики, так и общей потребностью производства, экономики и торговли той эпохи. В основе аналитической геометрии, созданной П. Ферма и Р. Декартом, лежат две идеи: 1) идея координат, приведшая к арифметизации плоскости потому, что каждой точке плоскости ставится в соответствие два числа, взятых в определенном, определенном порядке, и наоборот; 2) идея выражения любого уравнения двумя неизвестными как некоторой линии на плоскости и, наоборот, представление любой линии, определенной как некоторое геометрическое место точек, соответствующих уравнению. Первая работа, содержащая некоторое описание системы координат и использование этого метода при решении задач, была написана примерно в середине 30-х годов XVII в. Пьером Ферма и названа им «Введение в учение о плоских и частных местах». К своим новым идеям Ферма пришел, тщательно изучая, как и все великие математики того времени, классические труды древнегреческих ученых, в том числе Аполония. Ферма занимался даже восстановлением одного утраченного произведения Аполония – «Плоские места». В предисловии к "Введению" Ферма указывает, что древнегреческие ученые не владели общими методами решения геометрических задач. Каждая задача трактовалась отдельно и независимо от других, сходных с ней задач. Отсутствие единого общего подхода к исследованию и решению задач, как и отсутствие символики, приводило к повторению одного и того же и делало невозможным рационально классифицировать разные задачи и рассматривать их сущность с более широкой точки зрения. Ферма задалась целью установить общий подход к исследованию геометрических мест. Он с самого начала заявляет, что всякое уравнение между двумя «неизвестными». На прямой NZ (Наша ось абсцисс), обозначаемая буквой А (наш х), он отмечает начальную точку N, затем при точке Z строит угол NZ 1 (обычно прямой) и откладывает отрезок Z 1 (ордината), обозначаемый буквой Е (наш у) и равный второй неизвестной.(Рис. 1)  Рис.1. Декартова система координат Одним из недостатков труда Ферма была ограниченность его системы координат. Во-первых, фиксированной считалась только ось абсцисс N 2. Вот ординат по существу отсутствует, она вроде бы предполагается. Во-вторых, х и у принимают, как и в древности, только положительные значения. Фактически вся система координат состояла из одного, первого квадранта. «Геометрия» Декарта была впервые опубликована на французском языке в 1637 г. в качестве одного из трех приложений к его философскому труду «Рассуждение о методе». В нем, как и в других своих произведениях, Декарт выразил мнение, что математика является важнейшим средством для понимания законов Вселенной и лучшим подтверждением того, что человеческий разум способен обрести истину в науке и познавать природу. Еще в 23-летнем возрасте Декарта озарила мысль о перестройке всех наук на математической, аналитической основе, мысль о создании одной единственной и всеобъемлющей науки – «Универсальной математики». Это мнение его постоянно вдохновляло, хотя ему так и не удалось осуществить его полностью.«Геометрия» Декарта и возникла как частичная реализация общей его идеи, как объединение арифметики и алгебры с геометрией. Фактически "Геометрия" Декарта является алгебраическим трудом, и мало в ней можно найти из того, что мы сегодня называем "аналитической геометрией". Однако основная идея последней – алгебраический способ исследования вопросов геометрии с помощью метода координат – в ней четко изложена. Значительная часть «Геометрии» посвящена методам алгебраического и графического решения уравнений.Однако основная идея последней – алгебраический способ исследования вопросов геометрии с помощью метода координат – в ней четко изложена. Значительная часть «Геометрии» посвящена методам алгебраического и графического решения уравнений.Однако основная идея последней – алгебраический способ исследования вопросов геометрии с помощью метода координат – в ней четко изложена. Значительная часть «Геометрии» посвящена методам алгебраического и графического решения уравнений. Итак, не только у Ферма, но и у Декарта еще нет того, что мы называем системой декартовых координат на плоскости, есть только ось абсцисс с начальной точкой на ней. Хотя «Геометрия» Декарта еще не представляла собой подлинную аналитическую геометрию, все же она как наука развивалась именно под влиянием этой книги Декарта, а не под влиянием «Введения» Ферма, появившейся в печати лишь в 1679 г. Из-за нелегкого стиля и нечеткий способ изложения «Геометрия» Декарта оказалась очень тяжелой для чтения. Уже в 1649 г. француз Ф.Дебон в своих «коротких замечаниях» комментирует и дополняет Декарта. Так же поступил голландский математик Франц Ван Скоотен, издавший «Геометрию» Декарта на латинском языке в 1649 и 1659 гг. У ван Скоотена мы уже находим самостоятельное уравнение прямой у = аx + к, преобразование координат и т.п. Дж. Валлис впервые ввел и отрицательные абсциссы,которые он применил вместе с отрицательными ординатами. Метод координат постепенно пробивал себе дорогу. Некоторые из последователей Декарта хотя и рисовали вторую ось координат, но не применяли ее. Существенным толчком для дальнейшего развития координатной геометрии на плоскости были небольшой труд Ньютона "Перечисление кривых третьего порядка" (1706) и книга его соотечественника Дж. Стирлинга "Ньютоновые кривые третьего порядка" (1717), в которых использовались обе оси (хотя ось V еще не считалась равноправной с осью X) и квадранты. Лишь Г. Крамер в своем «Введении в анализ алгебраических кривых» (1750) впервые ввел ось V, считая ее равноправной с осью X1, и четко пользовался понятием двух координат точки на плоскости. Этого новшества, однако, еще нет во втором томе «Введение в анализ»(1748) Эйлера. С другой стороны, эта работа Эйлера,посвящена геометрии, стала первой в современном смысле аналитической геометрии конических сечений. Близкие к современным новым обозначениям и расположению материала плоской аналитической геометрии мы находим впервые у С. Лакруа в «Элементарном курсе прямолинейной и сферической тригонометрии и алгебраических программ к геометрии», который переиздавался много раз в течение целого века, начиная с 1798 г. Еще сложнее что-то говорить о полярной системе координат. Считается, что ее основы были также заложены в геометрии Декарта, но дальнейшее глубокое развитие ее в математике не прослеживается. И математики мало уделяют внимания полярной системе координат. Это связано с неудобством использования при проведении расчетов и построений, а также сложностью восприятия объектов в полярной системе координат. Хотя, при изучении объектов,находящиеся на огромных расстояниях и недоступных объектах очень удобно использовать именно полярную систему координат. Вся теория движения небесных тел построена на базе полярной системы координат. Были разработаны формулы перехода от декартовой системы координат в полярную и наоборот. На данный момент различные системы координат применяются в различных областях науки. В школе чаще работают с декартовыми и полярными системами координат. А основные положения учений известных математиков стали основой координатного метода решения задач, частично исследуемого в работе. Глава 2. Координатно-векторный метод решения стереометрических задач. Некоторые метрические задачи удобно решать с помощью координатно-векторного метода. Это прежде всего задачи, в которых речь идет о кубе, прямоугольном параллелепипеде или тетраэдре с прямым углом. Прямоугольная система координат в пространстве естественным образом связана с многогранниками, при этом среди координат их вершин есть много нулей, что упрощает вычисление. Сущность координатного метода, как и векторного, состоит в том, что геометрическая задача переводится на язык алгебры, и ее решение сводится к решению уравнений, неравенств или их систем. Из курса стереометрии известно, что уравнение плоскости, проходящей через точку  перпендикулярно ненулевому вектору перпендикулярно ненулевому вектору  в прямоугольной системе координат имеет вид: в прямоугольной системе координат имеет вид: , ,или  , де , де  Любое уравнение первой степени определяет в координатном пространстве единую плоскость, перпендикулярную вектору с координатами (A, B, C). Положение плоскости в пространстве однозначно определяется заданием трех точек, не лежащих на одной прямой. Пусть данная плоскость пересекает оси координат в точках  , ,  , ,  но не проходит через начало координат. Подставив координаты этих точек в общее уравнение плоскости, получим: но не проходит через начало координат. Подставив координаты этих точек в общее уравнение плоскости, получим: , ,  , ,  , ,где числа  отличны от нуля. Отсюда находим: отличны от нуля. Отсюда находим: И уравнение приводиться к виду: Полученное уравнение называют уравнением плоскости в отрезках. Его часто применяютпри решении задач. Как известно, расстояние между двумя точками  и и  вычисляется по формуле: вычисляется по формуле: Пользуясь данной формулой, можно легко вывести уравнение сферы. В прямоугольной системе координат уравнение сферы радиуса R с центром в точке C(a,b,c) имеет вид:  Если центр сферы совпадает с началом координат, то уравнение будет выглядеть так:  Рассмотрим способы задания прямой в координатном пространстве 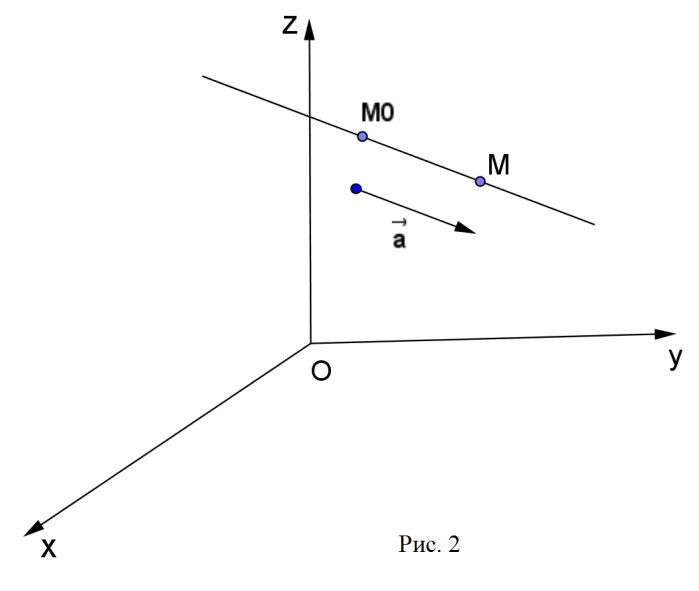 Пусть прямая l проходит через данную точку  и параллельна ненулевому вектору и параллельна ненулевому вектору  Вектор Вектор  назавают напрявляющим вектором прямой l (рис. 2). назавают напрявляющим вектором прямой l (рис. 2). Произвольная точка  принадлежит прямой l тогда и только тогда, когда векторы принадлежит прямой l тогда и только тогда, когда векторы або або  где t– некоторое число (параметр). Данное соотношение в координатах равносильно системе уравнений:  Данную систему называют параметричными уравнениями прямой. Если прямая l параллельна оси  то вектор то вектор  є направляющим вектором и уравнение прямой примет вид: є направляющим вектором и уравнение прямой примет вид:   (координата z примет произвольное значение). Пусть каждая с координат вектора не равна 0. Тогда исключив из полученных уравнений параметр t, получим уравнение: Полученные уравнения называются каноническими уравнениями прямой. Выведем формулу для вычисления расстояния от данной точки до плоскости  , заданной в прямоугольной системе координат уравнение: , заданной в прямоугольной системе координат уравнение: П 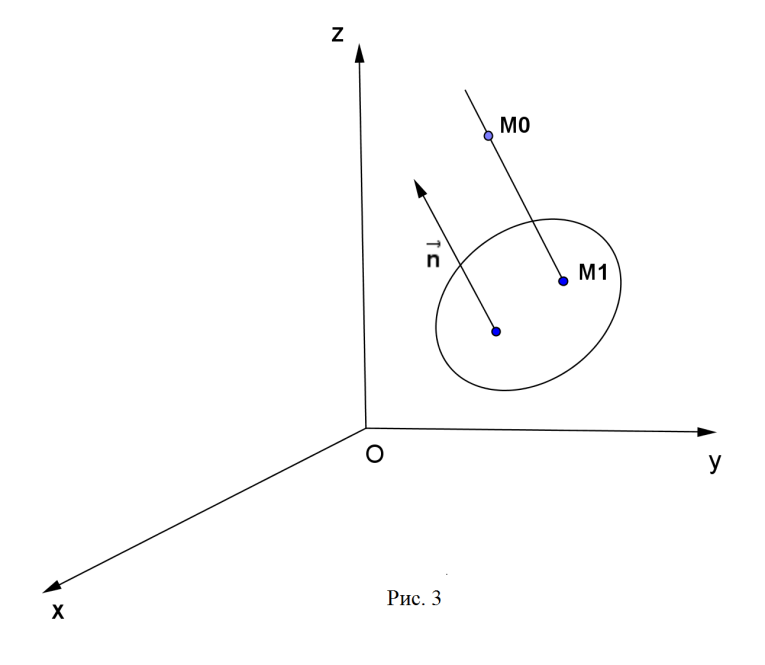 усть перпендикуляр, проведенный с точки усть перпендикуляр, проведенный с точки  до плоскости , пересеает её в точке до плоскости , пересеает её в точке  (Рис. 3). (Рис. 3). Тогда  Так как вектор  перпендикулярен и коллинеарен вектору перпендикулярен и коллинеарен вектору  то, огласно определению скалярного произведения то, огласно определению скалярного произведения Получим  Тогда   Получим: Получим: Точка  лежит в плоскости , поэтому лежит в плоскости , поэтому  . Таким образом, получаем: . Таким образом, получаем: Так как  , получим: , получим: При решении различных геометрических задач на вычисление длин отрезков и величин углов, на доказательство геометрических неровностей эффективно использовать скалярное умножение векторов. Глава 3. Применение координатного метода Применение метода координат даёт нам возможность для решения следующих задач: 1)Нахождение расстояния d между двумя точками A(x1; y1; z1) и B(x2; y2; z2), заданными своими координатами:  2)Нахождение координат середины С(x; y; z) отрезка АВ, где A(x1; y1; z1), B(x2; y2; z2):  3) Нахождение угла между двумя векторами, заданными своими координатами:  , ,где  . .4)Нахождение угла между прямой l и плоскостью α:  или в координатах или в координатах  , где , где - вектор нормали к плоскости α, - вектор нормали к плоскости α, - направляющий вектор прямой l - направляющий вектор прямой l5)Нахождение угла между плоскостями путем составления уравнения каждой плоскости Ах+Ву+Сz+D=0 и определения угла между нормалями к плоскостям. Нормаль n при этом имеет координаты  : : или или  6)Нахождение расстояния от произвольной точки М0(х0, у0, z0) до плоскости Ах+Ву+Сz+D=0: 2.Нахождение угла между скрещивающимися прямыми Углом между скрещивающимися прямыми называется угол между двумя прямыми, параллельными им и проходящими через произвольную точку. 0˚<(a,α)<90˚. Для нахождения угла φ между прямыми m и l, если векторы  и параллельны соотвественно этим прямым, используют формулу: и параллельны соотвественно этим прямым, используют формулу:  или в координатной форме . или в координатной форме .В частности, для того чтобы прямые m и l были перпендикулярны, необходимо и достаточно, чтобы  или или  . .Пример 1. В прямоугольном параллелепипеде ABCDA1B1C1D1 AB=2, AD=4, AA1=3. Точка Е- середина ребра А1В1 . Найдите угол между прямыми ВС1 и АЕ  Решение: Пусть точка В(0;0;0)-начало координат. Тогда С1(0;4;0), А(3;0;0), Е(1,5;0;3). Найдем координаты векторов  и и  . .По формуле: находим  3.Нахождение угла между прямой и плоскостью Углом между плоскостью и не перпендикулярной ей прямой называется угол между этой прямой и её проекцией на данную плоскость. 0˚<(a,α)<90˚. Угол между прямой l и плоскостью α можно вычислить по формуле или в координатах , где - вектор нормали к плоскости α, - направляющий векор прямой l;Пример 1. В прямоугольном параллелепипеде ABCDA1B1C1D1 рёбра АВ и АА1 равны 1, а ребро АD=2. Точка Е – середина ребра В1С1. Найдите угол между прямой ВЕ и плоскостью (АВ1С).  Решение: Составим уравнение плоскости (АВ1С.): ах+bу+cz+d=0, где a, b и c – координаты нормали к плоскости. Чтобы составить это уравнение, необходимо определить координаты трёх точек, лежащих в данной плоскости: А(1; 0; 0), В1(0;0;1), С(0;2;0). Решая систему   находим коэффициенты а, b и с уравнения ах+bу+cz+d=0: а= -d, b=  , c=-d. Таким образом, уравнение примет вид , c=-d. Таким образом, уравнение примет вид  или, после упрощения, 2х+у+2z-2=0. Значит, нормаль n к этой плоскости имеет координаты или, после упрощения, 2х+у+2z-2=0. Значит, нормаль n к этой плоскости имеет координаты  . .Найдем координаты вектора  Найдем угол между вектором  и нормалью к плоскости по формуле скалярного произведения векторов: и нормалью к плоскости по формуле скалярного произведения векторов:  . .Ответ: 45˚ 4.Нахождение угла между двумя плоскостями Двугранный угол, образованный полуплоскостями измеряется величиной его линейного угла, получаемого при пересечении двугранного угла плоскостью, перпендикулярной его ребру. Величина двугранного угла принадлежит промежутку(0˚; 180˚) Величина угла между двумя пересекающимися плоскостями принадлежит промежутку (0˚; 90˚]. Угол между двумя параллельными плоскостями считается равным 0˚. Угол между двумя пересекающимися плоскостями можно вычислить как угол между нормалями к этим плоскостям по формуле или в координатной форме , где  - вектор нормали плоскости А1х+В1у+С1z+D1=0, - вектор нормали плоскости А1х+В1у+С1z+D1=0,  - вектор нормали плоскости A2x+B2y+C2z+D2=0. - вектор нормали плоскости A2x+B2y+C2z+D2=0.Пример 1. В единичном кубе АВСDA1В1С1D1 найдите угол между плоскостями АD1Е и D1FC, где точки Е и F-середины ребер А1В1 и В1С1 соответственно.  Решение: Введем прямоугольную систему координат с началом в точке А(0;0;0). Далее находим координаты тех точек, которые необходимы для составления уравнений плоскостей:  (1;0;1), E(0;0,5;1), C(1;1;0), F(0,5;1;1). Составим уравнение плоскости (A E), используя уравнение А1х+В1у+С1z+D1=0. Подставим координаты всех трех точек в это уравнение и решим систему из трех уравнений: (1;0;1), E(0;0,5;1), C(1;1;0), F(0,5;1;1). Составим уравнение плоскости (A E), используя уравнение А1х+В1у+С1z+D1=0. Подставим координаты всех трех точек в это уравнение и решим систему из трех уравнений: А  ∙0 + В∙0 + С∙0 +D =0; ∙0 + В∙0 + С∙0 +D =0; А∙1 + В∙0 + С∙1 +D =0; А∙0 + В∙0,5 + С∙1 +D =0. Получим, что А= - С, В= - 2С, D= 0. Таким образом, уравнение примет вид: х +2у – z =0. Значит, А1=1, В1= 2, С1= -1 Составим уравнение плоскости (CF ), используя уравнение А2х+В2у+С2z+D1=0. Подставим координаты всех трех точек в это уравнение и решим систему из трех уравнений: А ∙1 + В∙1 + С∙0 +D =0; А∙1 + В∙0 + С∙1 +D =0; А∙0,5 + В∙1 + С∙1 +D =0. Получим, что В = С, А = 2С, D = - 3С. Таким образом, уравнение примет вид: 2х +у +z – 3 = 0. Значит, А2= 2, В2 = 1, С2= 1. По формуле:  . .Значит, угол между плоскостями равен 60̊. Ответ: 60̊. 5.Нахождение расстояния от произвольной точки до плоскости. Расстояние от точки до плоскости , не содержащей эту точку , есть длина отрезка перпендикуляра , опущенного из этой точки на плоскость . Расстояние от точки М до плоскости α вычисляется по формуле  , где М(х0;у0;z0), плоскость α задана уравнением ax+by+cz+d=0. , где М(х0;у0;z0), плоскость α задана уравнением ax+by+cz+d=0.Пример 1. В правильной четырехугольной пирамиде со стороной основания, равной 2 и высотой, равной 4, найти расстояние от точки А до плоскости (SBC). 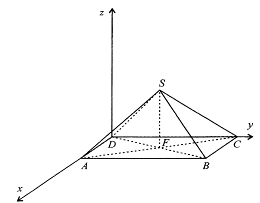 Р  ешение: Введем прямоугольную систему координат с началом в точке D(0;0;0). Составим уравнение плоскости (SBC), используя координаты точек В(2;2;0), С(0;2;0), S(1;1;4) и решив систему уравнений: ешение: Введем прямоугольную систему координат с началом в точке D(0;0;0). Составим уравнение плоскости (SBC), используя координаты точек В(2;2;0), С(0;2;0), S(1;1;4) и решив систему уравнений:a∙2+b∙2+c∙0+d = 0 a∙0 +b∙2 +c∙0+d = 0 a∙1 +b∙1 +c∙4+d = 0. Получим, что d= -2∙b, a=0, c =  . Таким образом, уравнение плоскости примет вид: . Таким образом, уравнение плоскости примет вид: 0∙х +4∙у + z - 8 =0. Значит, a=0, b=4, c=1, d=- 8. Точка А, расстояние от которой до плоскости нужно найти, имеет координаты: А(2;0;0). Значит,  =2, =2, = 0, = 0,  =0. По формуле нахождения расстояния от точки до плоскости имеем: =0. По формуле нахождения расстояния от точки до плоскости имеем: Ответ:  . .Заключение Следовательно, при решении стереометрических задач кроме традиционных методов с использованием алгебры и тригонометрии могут использоваться и другие методы, в том числе и координатно-векторный. Координатно-векторный метод объединяет два метода решения задач: векторный и координатный. Сравнивая указанный метод с другими методами решения стереометрических задач, мы обнаружили, что очень часто он позволяет избежать искусственных построений, упрощает решение многих геометрических задач и доказательство теорем. Он удобен также тем, что не нужно использовать большое количество формул, признаков и свойств фигур. Координатно-векторный метод в школьном курсе геометрии применяется очень мало, хотя и является достаточно удобным. Несмотря на то, что учащиеся не очень хорошо понимают этот метод, важно сочетать координатно-векторный метод вместе с аналитическим методом. Такой подход к решению стереометрических задач будет способствовать поиску более простых и доступных решений задач и лучшему усвоению учащимися учебного материала Список использованных источников Атанасян Л.С.,Базылев В.Т. Геометрия. В 2-х ч.. Ч.1.- М.: Просвещение,1986.-336 с. Григорьева Т. П. К изучению скалярного произведения скалярного произведения векторов // Математика в школе, 1979. - № 6, с. 43-44. Кушнир А. И. Векторные методы решения задач. – К.: Обериг – 1994р.- 210 с. Готман Э. Г. Стереометрические задачи и методы их решения. – М.: МЦНМО, 2006. – 160 с. Окунев А. А. Об эксперементальном преподавании стереометрии// Математика в школе, 1985. - № 3, с. 36-39. Понарин Я. П. Элементарная геометрия: В 2 т. Т. 2: Стереометрия, преобразования пространства. – М.:МЦНМО, 2006. – 256 с. Потоскуев Е. Векторный метод решения стереометрических задач // Математика., 2009. - № 6. Прасолов В. В., Шарыгин И. Ф. Задачи по стереометрии. —М.: Наука, 1989. |