Моделирование, кинематическое и динамическое исследование и симуляция манипулятора с 5 степенями свободы
 Скачать 1.32 Mb. Скачать 1.32 Mb.
|

|
Минобрнауки России Юго-Западный государственный университет Кафедра механики, мехатроники и робототехники КУРСОВАЯ РАБОТА по дисциплине «Моделирование и исследование мехатронных систем и роботов» на тему «Моделирование, кинематическое и динамическое исследование и симуляция манипулятора с 5 степенями свободы» Направление подготовки 15.04.06 Мехатроника и робототехника
Группа МТ-21м
Курск 2023 г. РЕФЕРАТ Курсовая работа по дисциплине «Моделирование и исследование мехатронных систем и роботов» на тему «Моделирование, кинематическое и динамическое исследование и симуляция манипулятора с 5 степенями свободы»: содержит 27 страниц, 14 рисунков, 6 источников литературы. Ключевые слова: Траектория, обратная кинематика, прямая кинематика, обратная динамика, прямая динамика, 5 степеней свободы, MATLAB/SimScape Multibody, SolidWorks, манипулятор, рабочая область. Целью курсовой работы является разработка системы управления суставами манипулятора по вполне заданной траектории с использованием инверсной кинематики руки манипулятора, расчет моментов сил на уровне суставов с использованием инверсной динамики и 3D моделирование робота. Чтобы соответствовать спецификациям этой курсовой работы, траектория конечного эффектора была установлена априори, которая состоит из траектории логарифмической спирали. Затем мы продолжили изучение прямого и обратного кинематического анализа. Что касается инверсной кинематики, то она решалась путем реализации алгоритма, основанного на алгебраическом методе. Прямая кинематика, с другой стороны, была рассчитана для проверки, чтобы убедиться, что конечный орган принимает желаемое положение, путем точной замены тех, которые являются значениями полученных углов, для суставных переменных, обратными кинематика. Была кратко объяснена прямая динамика, а что касается обратной динамики, то она была разработана с помощью кодов, которые позволяют нам точно найти пару сил на каждом суставе робота при каждом положении рабочего органа. Проект был разработан в программной среде Matlab/Simulink с помощью набора инструментов Simscape/Multibody для части моделирования и программного обеспечения SolidWorks для 3D-моделирования. Содержание Введение................................................................................................................. 4 1. Описание робота................................................................................................ 5 1.1 Геометрические характеристики робота-манипулятора......................... 5 1.2 Системы отсчета.......................................................................................... 5 1.3 Матрицы трансформации........................................................................... 6 2. Кинематический анализ.................................................................................... 8 2.1 Планирование траектории.......................................................................... 8 2.2 Прямая кинематика..................................................................................... 9 2.3 Обратная кинематика.................................................................................. 10 3. Модель Simscape MultiBody............................................................................. 12 4. Анализы и результаты....................................................................................... 13 4.1 Выделение данных...................................................................................... 14 4.2 Проверка и результаты............................................................................... 14 5. Динамический анализ........................................................................................ 15 5.1 Метод Лагранжа-Эйлера............................................................................ 16 5.2 Обратная динамика..................................................................................... 17 5.3 Формулировка обратной динамики в MatLab.......................................... 19 5.4 Прямая динамика........................................................................................ 22 6. Рабочее пространство........................................................................................ 23 7. 3D-моделирование робота-манипулятора....................................................... 24 Заключение ............................................................................................................ 25 Приложение............................................................................................................ 26 Список используемой литературы ...................................................................... 27 Введение Целью курсовой работы является разработка системы управления суставами манипулятора по вполне заданной траектории с использованием инверсной кинематики руки манипулятора, расчет моментов сил на уровне суставов с использованием инверсной динамики и 3D моделирование робота. Робот — это искусственная машина, выполняющая определенные действия на основе данных ей команд и своей стартовой конфигурации. Как правило, эти задачи должны выполняться для того, чтобы заменить людей или помочь им в таких видах деятельности, как производство, строительство, работа с тяжелыми или опасными материалами, или в условиях, которые недопустимы или несовместимы с условиями жизни человека. Механическая структура роботов состоит из последовательности механических элементов, соединенных друг с другом шарнирами, которые позволяют им двигаться. Соединения классифицируются как вращательные или призматические, в зависимости от типа относительного движения, которое они допускают, соответственно вращательное и поступательное. Физическую структуру робота обычно можно описать следующим образом: основание, фиксированное или подвижное, соединенное с конечным рабочим органом через звенья, или твердые тела, соединенные между собой шарнирами, которые обеспечивают движение всей конструкции. Твердое тело в пространстве имеет, если оно не связано с ограничениями, шесть степеней свободы, три из которых связаны с возможностью перемещения в трех пространственных измерениях, а остальные три с возможностью вращения вокруг трех осей ортонормированной триады, заодно с твердым телом. Количество степеней свободы конструкции эквивалентно количеству свободных координат, связанных с исполнительными механизмами, и представляет собой минимальное количество независимых параметров, необходимых для описания всех возможных конфигураций системы при движении. 1. Описание робота И 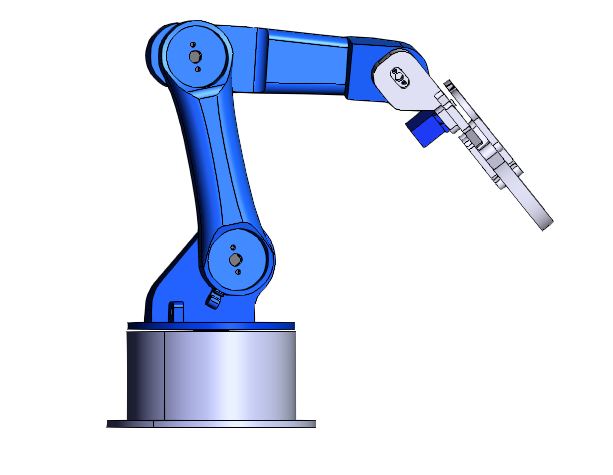 сследуемый робот представляет собой серийный манипулятор с пятью степенями свободы, то есть с пятью степенями свободы, все сочленения которого вращаются. Со структурной точки зрения его можно проследить до человеческой руки, поскольку разрешенные движения аналогичны движениям плеча, локтя и запястья. Рис. 1. Реальная модель робота с 5 степенями свободы. Геометрические характеристики робота-манипулятора Твердые тела манипулятора приводятся в движение электрическими патрубками, эти твердые тела гетерогенны, состоят из алюминиевой части, а другая часть является пайщиком. В таблице ниже у нас есть геометрические характеристики его твердых тел.
Табл. 1. Геометрические характеристики тел Системы отсчета При назначении систем отсчета было решено принять соглашение Денавита-Хартенберга (D-H), которое позволяет представлять геометрическое преобразование в евклидовом пространстве с использованием четырех параметров, а именно: • d: расстояние оси Zn-1 от общей нормали; • θ: угол поворота вокруг оси Zn-1, необходимый для совмещения Xn-1 с Xn; • a: минимальное расстояние между осями Zn-1 и Zn; 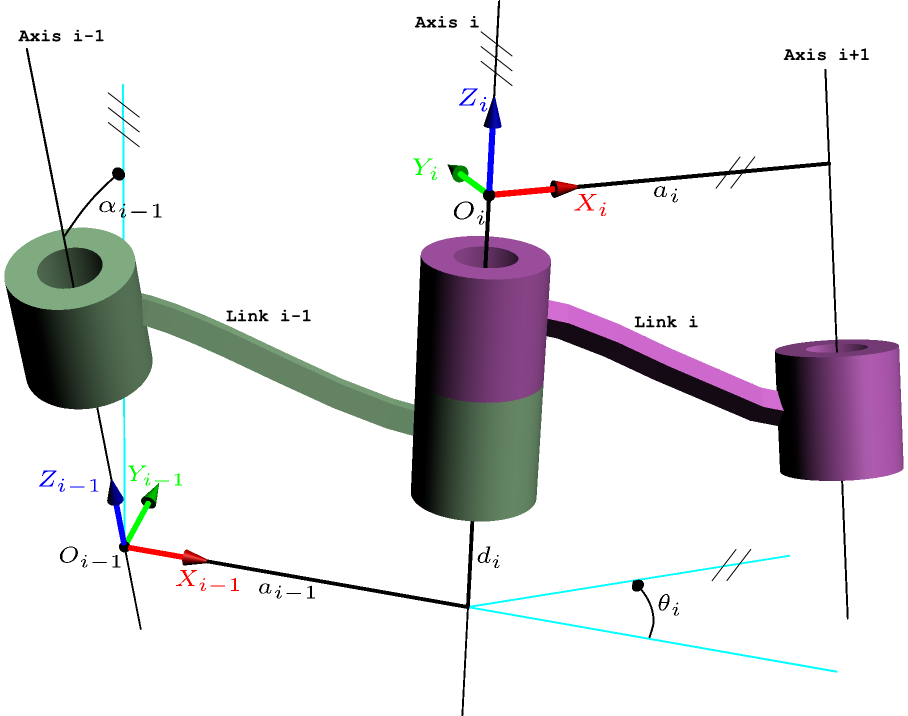 • α: угол поворота вокруг общей нормали Xn для выравнивания оси Zn-1 с осью Zn. • α: угол поворота вокруг общей нормали Xn для выравнивания оси Zn-1 с осью Zn.Рис. 2. Параметры формулы Денавита-Хартенберга Параметры, которые были выбраны для использования в конкретном случае, показаны в следующей таблице:
Табл. 2. Значения параметров D-H Матрицы трансформации Матрицы трансформации используются для описания положения и ориентации твердого тела в пространстве. Эти матрицы, каждая размером (4x4), состоят из: подматрицы R (3x3), определяющей ее вращение; вектор-столбец P размерности (3x1), определяющий его позицию; и вектор-строку размерности (1x4), который описывает его однородные координаты. Что касается последнего, каждый элемент примет значение, равное 0, если он будет представлять вектор, или 1, если он будет точкой. (1) 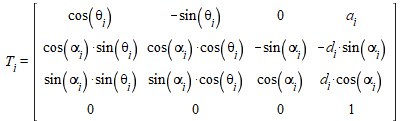 Таким образом, каждое звено робота может быть определено с помощью одной из этих матриц: Таким образом, каждое звено робота может быть определено с помощью одной из этих матриц:(2) Положение рабочего органа, то есть положение и ориентация по отношению к системе отсчета основания, могут быть получены из их конкатенации следующим образом:  (3) (3)Где с последней матрицей мы анализируем ориентацию рабочего органа. Фактически путем подстановки параметров Денавита-Хартенберга получается следующая однородная матрица трансформации:  (4) 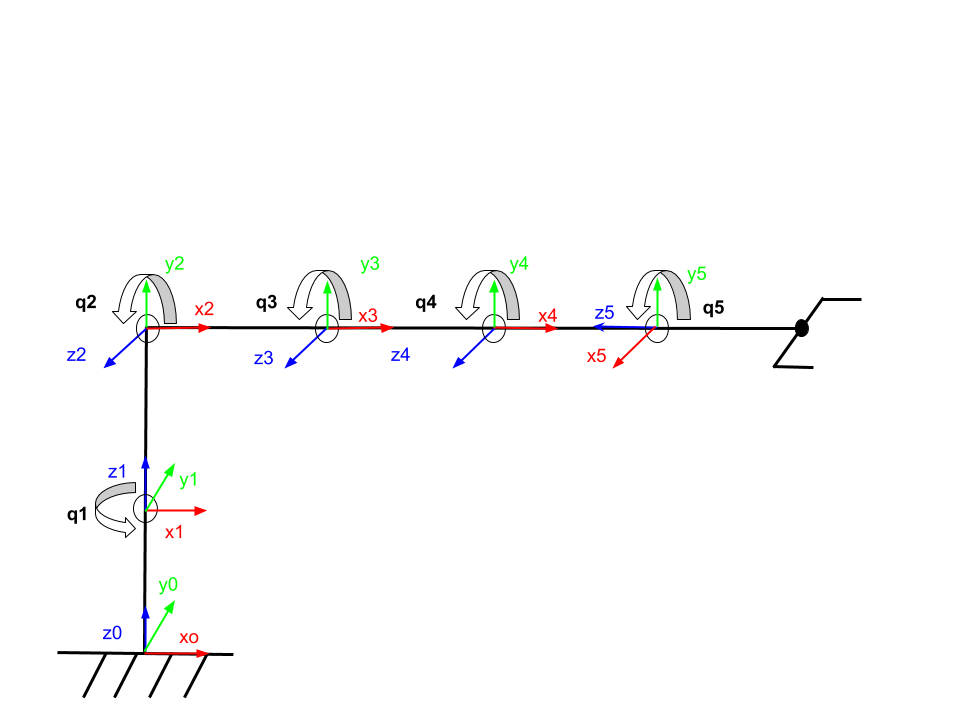 Таким образом, системы отсчета, применяемые к каждому суставу, определяются следующим образом: Таким образом, системы отсчета, применяемые к каждому суставу, определяются следующим образом:Рис. 3. Системы отсчета, связанные с суставами. 2. Кинематический анализ К изучению кинематики, т. е. к описанию движения серийного манипулятора, можно подойти, рассмотрев две дополняющие друг друга задачи, а именно прямую и обратную кинематику. Р 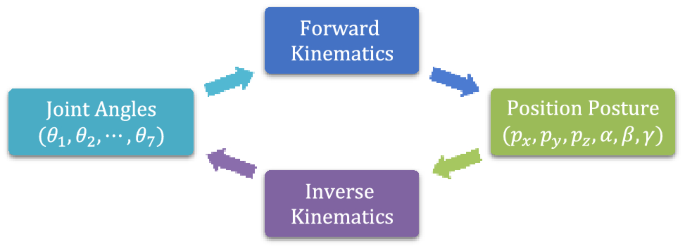 ис. 4. Блок-схема процесса кинематического анализа. 2.1 Планирование траектории Предполагаемая траектория рабочего органа представляет собой логарифмическую спираль, выраженную в параметрической форме, т.е.:   ( 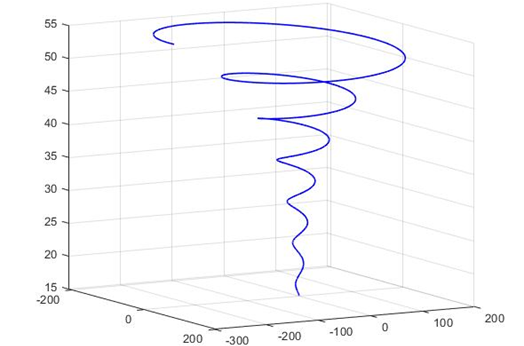 5) Рис. 5. Логарифмическая спираль в пространстве Следует отметить, что затем значение t будет заменено на этапе моделирования временем дискретизации. 2.2 Прямая кинематика Чтобы получить матрицу, описывающую прямую кинематику, необходимо сцепить матрицы преобразования каждого шарнира:  (6) (6)Тогда получим следующую матрицу:  (7) Где отдельные элементы соответственно:    (8) (8)   (9) (9)  (10) (10)   (11) (11)Символ ѱ указывает на “Wrist Angle Relative to Ground”, постоянный угол, который представляет поворот запястья робота по отношению к остальной части руки. Поскольку начальная поза робота была выбрана как та, которую он принимает в своей нулевой конфигурации, θi = {0} используется в качестве начальных значений углов совместных переменных, получая следующую числовую матрицу:  H =    (12) 2.3 Обратная кинематика При решении обратной задачи кинематики используется алгебраический подход. С помощью уравнений px, py, pz, рассчитанных в прямой кинематике, определяются формулы для расчета величины угла каждого шарнира. Для получения значения угла θ1 рассматриваются соответствующие числовые значения выражений px, py, называемые x и y, и записывается следующее тригонометрическое соотношение: Для определения шарнирного угла θ2, связанного со вторым звеном, необходимо учитывать равенства:  (14) (14)  (15) (15) И (16) Относительно следующего равенства:  (17) (17)Предполагая, что z указывает числовое значение, связанное с pz, мы имеем это: г (19) Этот угол Вартга по конструкции задается равным 0° таким образом, чтобы предположить, что невозможно изменить ориентацию захвата, которым робот захватывает возможный объект, подлежащий захвату. В  ыполняя связь член-к-члену между [18] и [16], мы получаем, что: ыполняя связь член-к-члену между [18] и [16], мы получаем, что:(20) Проводя различные алгебраические переходы и перерабатывая это выражение с помощью тригонометрических формул, получаем:  (21) Последнее можно проследить до суммы тангенса, на самом деле: (22) (23) Отсюда можно вывести, что:  (24) (24)Чтобы вычислить совместную переменную θ3, найдите значение  из суммы квадратов между [16] и [18], получив: из суммы квадратов между [16] и [18], получив: (25)  Из которого θ3 можно определить по следующей зависимости: Из которого θ3 можно определить по следующей зависимости:(26) Наконец, что касается θ5, используются следующие уравнения, полученные из прямой кинематики:  (28) (28) (29) (29) (30) (30) (31) (31)где rij обозначает соответствующее числовое значение. В этот момент для определения значения  достаточно написать: достаточно написать: (32) (32)Из чего получаем:  (33) (33)Аналогично, для значения  будем иметь: будем иметь: (34) (34)Из чего получаем:  (35) (35)Наконец, θ5 рассчитывается по формуле арктангенса: (36) 3. Модель Simscape MultiBody Для того, чтобы иметь возможность имитировать установленное для робота движение, использовалась программная среда Simulink, в частности, ссылаясь на библиотеку Simscape. Используя пакеты, доступные в подбиблиотеке Multibody, удалось создать следующую модель: 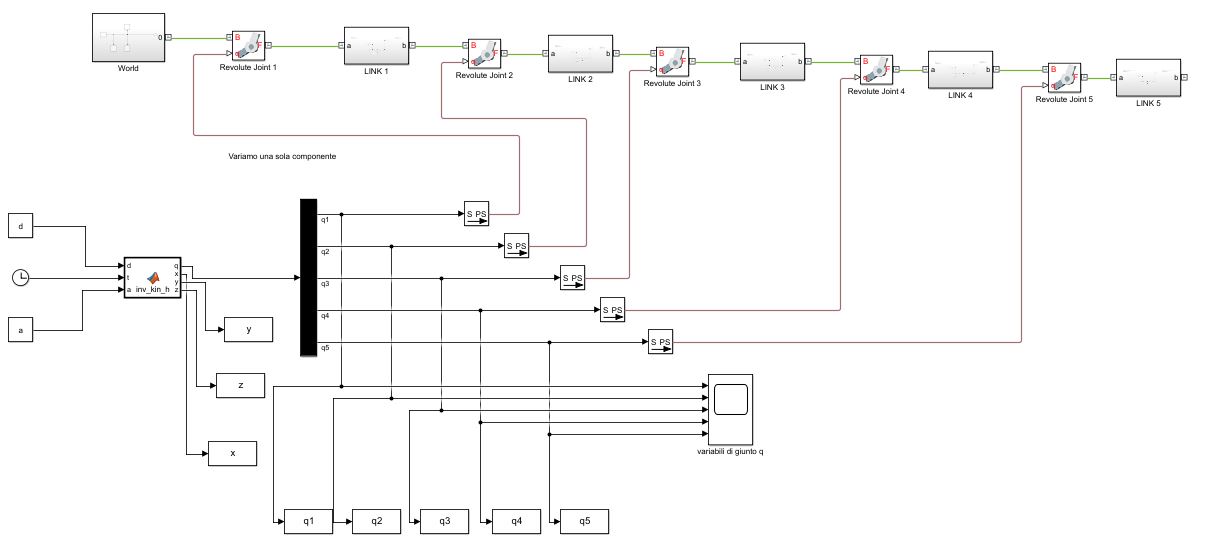 Рис. 6. Модель Simulink робота 5DOF В частности, в блоке MatlabFunction "inv_kin_h" уже описанный ранее алгоритм кинематической инверсии реализован путем задания заданной траектории рабочего органа. Блок получает на вход векторы, содержащие параметры Денавита-Хартенберга и время дискретизации, используемое при моделировании, через часы. На выходе он вернет значение углов, связанных с переменными соединения, и положением, выраженным в декартовых координатах (x, y, z), принимаемых инструментом момент за моментом. 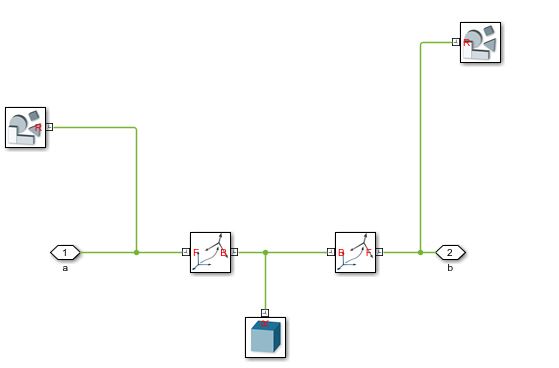 «Физическая» реализация робота происходит в верхней части модели Simulink, где были созданы различные звенья, соединенные друг с другом Revolute Joints. Пример показан на рисунке ниже: «Физическая» реализация робота происходит в верхней части модели Simulink, где были созданы различные звенья, соединенные друг с другом Revolute Joints. Пример показан на рисунке ниже:Рис. 7. Пример ссылки, смоделированной в Simulink Каждое звено представлено «телом», определяющим его физическую форму, парой систем отсчета и двумя «жесткими преобразованиями», посредством которых задаются перемещения и повороты звена. Каждое Revolute Joint настроено на получение изменений, испытываемых каждым углом, чтобы гарантировать желаемое движение. 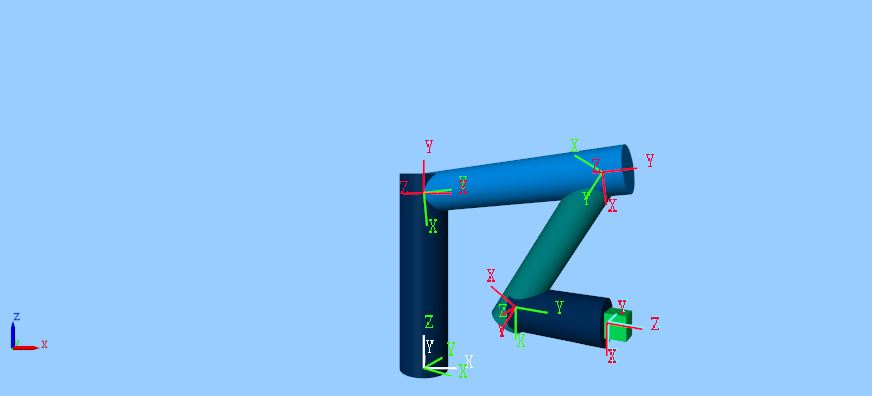 Рис. 8. Модель робота с 5 степенями свободы 4. Анализы и результаты В этом разделе мы рассмотрим часть проверки алгоритма кинематической инверсии, реализованную с использованием алгебраического метода. Принятая стратегия состоит в том, чтобы использовать значения, определенные для совместных переменных, в части, относящейся к инверсной кинематике, чтобы затем заменить их в матрице, которая описывает прямую кинематику рассматриваемого робота. 4.1 Выделение данных 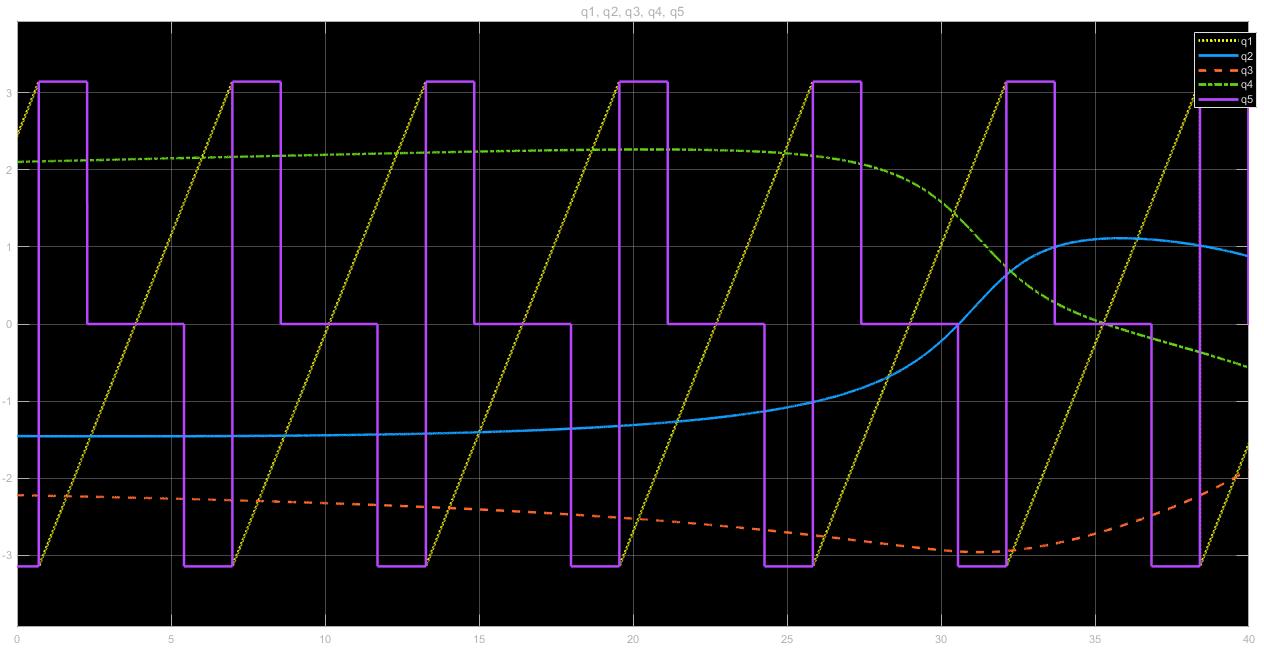 Данные, полученные после моделирования, были экспортированы в рабочее пространство Matlab с использованием соответствующих блоков Simulink, как показано на ранее представленной блок-схеме. Полученные значения совместных переменных были собраны в векторы, из которых были извлечены выборки для использования для проверки. Данные, полученные после моделирования, были экспортированы в рабочее пространство Matlab с использованием соответствующих блоков Simulink, как показано на ранее представленной блок-схеме. Полученные значения совместных переменных были собраны в векторы, из которых были извлечены выборки для использования для проверки.Рис. 9. Совместные значения, полученные из обратной кинематики. 4.2 Проверка и результаты Процедура проверки, чтобы продемонстрировать, что траектория, выполняемая конечным рабочим органом, точно соответствует той, которая была выбрана в первом случае, была реализована с помощью сценария Matlab, где, выбрав шаг выборки 1000, чтобы получить 16 значений по время, каждый сустав плюс конечное значение каждого из них позволяет приступить к расчету позы, принятой конечным рабочим органом, решая непосредственную кинематику рассматриваемого робота. На самом деле, для каждого набора значений совместных переменных, извлеченных в конкретный момент времени t, будет вычислено их положение в декартовых координатах. После этого было проверено, что найденные точки действительно принадлежат искомой траектории, что видно из рисунка ниже. 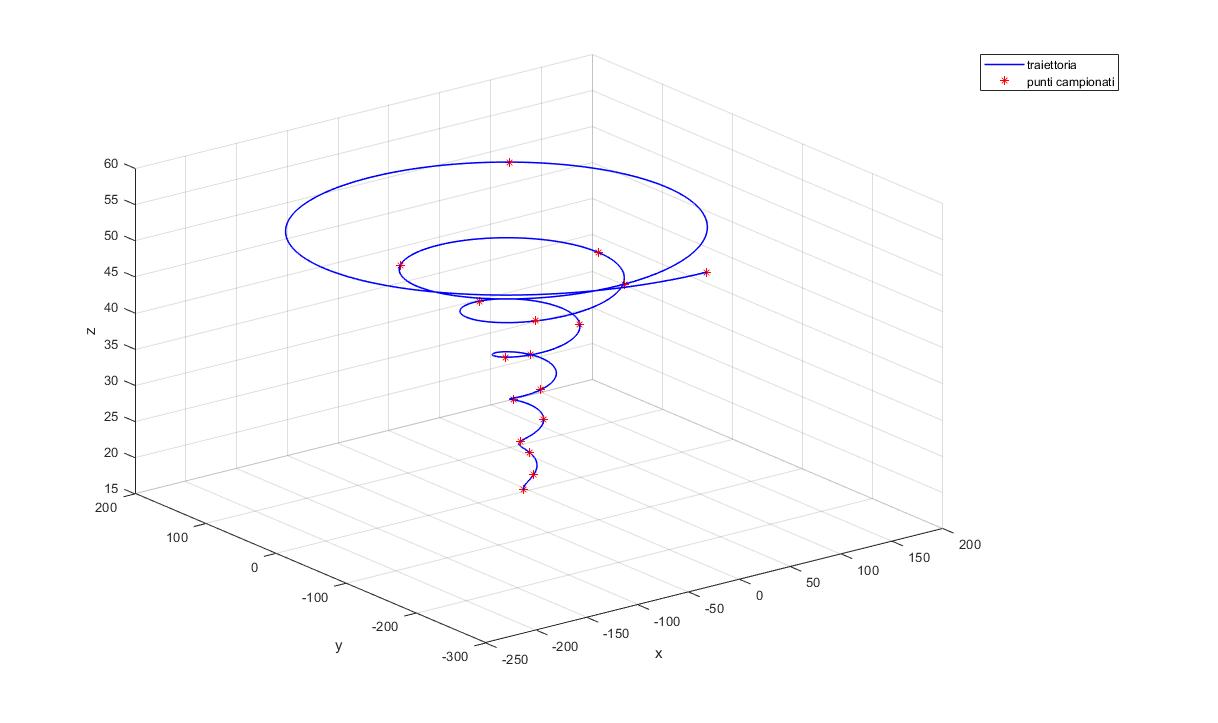 Рис. 10. Точки, определяемые обратной кинематикой, принадлежащие траектории. 5. Динамический анализ Предметом динамики манипулятора как раздела робототехники является математическое описание действующих на манипуляторе сил и моментов в форме уравнений динамики движения. Также уравнения необходимы для моделирования движения манипулятора с помощью ЭВМ, при выборе законов уравнения и при оценке качества кинематической схемы и конструкции манипулятора. Задача управления включает задачу формирования динамической модели реального манипулятора и задачу выбора законов или стратегий управления, обеспечивающих выполнение поставленных целей. Динамическая модель манипулятора может быть построена на основе использования известных законов ньютоновой или лагранжевой механики. Результатом применения этих законов является уравнения, связывающие действующие в сочленениях силы и моменты с кинематическими характеристиками и параметрами движения звеньев. Таким образом, уравнения динамики движения реального манипулятора могут быть получены методами Лагранжа-Эйлера или Ньютона-Эйлера. Уравнения Лагранжа-Эйлера обеспечивают строгое описание динамики манипулятора. Их можно использовать для решения прямой и обратной задачи динамики. Прямая задача состоит в том, чтобы по заданным силам и моментам определить обобщённые ускорения, интегрирование которых позволит получить значения обобщённых координат и скоростей. Обратная задача динамики заключается в том, чтобы по заданным обобщённым координатам, скоростям и ускорениям определить действующие в сочленениях манипулятора силы и моменты. Для решения обеих задач, как правило, необходимо вычислить динамические коэффициенты  и и  . Вычисление этих коэффициентов требует выполнения очень большого числа арифметических операций. В связи с этим уравнения Лагранжа-Эйлера без дополнительных упрощений практически неприменимы для управления манипулятором в реальном времени. . Вычисление этих коэффициентов требует выполнения очень большого числа арифметических операций. В связи с этим уравнения Лагранжа-Эйлера без дополнительных упрощений практически неприменимы для управления манипулятором в реальном времени.5.1 Метод Лагранжа-Эйлера Полное описание движения манипулятора можно получить, применяя метод Лагранжа-Эйлера для неконсервативных систем. Описав кинематику манипулятора с помощью матричного представления Денавита-Хартенберга, можно получить уравнение динамики. Такое совместное использование Д-Х-представления и метода Лагранжа приводит к компактной векторно-математической форме уравнений движения, удобной для аналитического исследования и допускающей реализацию на ЭВМ. Вывод уравнений динамики движения манипулятора основан на следующем: 1. На описании взаимного пространственного расположения систем координат i-го и (i-1)-го звеньев с помощью матрицы преобразования однородных координат  . Эта матрица преобразует координаты произвольной точки относительно i-й системы координаты этой же точки относительно (i-1)-й системы координат. . Эта матрица преобразует координаты произвольной точки относительно i-й системы координаты этой же точки относительно (i-1)-й системы координат.2. На использовании уравнения Лагранжа-Эйлера: 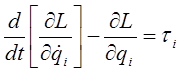 (37) где L-функция Лагранжа   полная кинетическая энергии манипулятора; полная кинетическая энергии манипулятора; полная потенциальна энергия манипулятора; полная потенциальна энергия манипулятора; обобщённые координаты манипулятора; обобщённые координаты манипулятора; первая производная по времени обобщённых координат; первая производная по времени обобщённых координат; обобщённые силы (или моменты), создаваемые в i-м сочленении для реализации заданного движения i-го звена. обобщённые силы (или моменты), создаваемые в i-м сочленении для реализации заданного движения i-го звена.Для того, чтобы воспользоваться уравнением Лагранжа-Эйлера, необходимо выбрать систему обобщённых координат. Обобщённые координаты представляют собой набор координат, обеспечивающий, полное описание положения рассматриваемой физической системы в абсолютной системе координат. Существуют различные системы обобщенных координат, пригодные для описания простого манипулятора с вращательными и поступательными сочленениями. Однако, поскольку углы поворотов в сочленениях непосредственно доступны измерению с помощью потенциометров или других датчиков, то они составляют наиболее естественную систему обобщенных координат. В этом случае обобщённые координаты совпадают с присоединенными переменными манипулятора. В частности, если i-е сочленение вращательное, то  , если же i-е сочленение поступательное, то , если же i-е сочленение поступательное, то  . .5.2 Обратная динамика Обратная задача динамики заключается в том, чтобы определить крутящий момент, необходимый для каждого из приводов робота, с учетом текущего положения и скорости, и желаемого ускорения. Эта информация важна на этапах моделирования проекта для определения требуемых характеристик привода, которые будут использоваться на физическом прототипе. Кроме того, расчет обратной динамики можно использовать в алгоритме управления крутящим моментом. Чтобы вычислить обратную динамику всей руки, мы сначала считаем связи робота между рукой и рабочим органом жесткими. Используя кинематику, описанную в предыдущем разделе, мы вычисляем положение центра масс и значение матрицы инерции рабочего органа с прикрепленным к нему остатком робота. Затем вычисляется обратная динамика для манипулятора. Вектор крутящих моментов, приложенных к шарнирам, отмечен  , который обобщает уравнения обратной динамики движения робота-манипулятора в виде вектора, записывается следующим образом: , который обобщает уравнения обратной динамики движения робота-манипулятора в виде вектора, записывается следующим образом: (38) где – обобщённые силы в i -м сочленении для реализации движения i -го звена,  определяется формулой (39), устанавливает связь сил и моментов которые действуют в сочленениях с ускорениями присоединённых переменных, определяется формулой (39), устанавливает связь сил и моментов которые действуют в сочленениях с ускорениями присоединённых переменных,  – определяется равенством (40) и (41), устанавливает связь сил и моментов, которые действуют в сочленениях со скоростями изменения присоединенных переменных, определяется равенством (42), вычисляет силу тяжести, воздействующую на звенья манипулятора, – определяется равенством (40) и (41), устанавливает связь сил и моментов, которые действуют в сочленениях со скоростями изменения присоединенных переменных, определяется равенством (42), вычисляет силу тяжести, воздействующую на звенья манипулятора,  – обобщённое ускорение, – обобщённое ускорение,  – обобщённая скорость, – обобщённая скорость,  – количество звеньев робота-манипулятора. – количество звеньев робота-манипулятора. Коэффициенты определяются равенством Коэффициенты определяются равенством(39) Коэффициенты  определяются равенством определяются равенством (40) 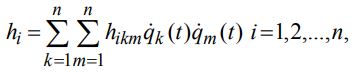 (41) Где  – матрица, описывает изменения положения i-го звена, возникающие при движении в j -м сочленении манипулятора; – матрица, описывает изменения положения i-го звена, возникающие при движении в j -м сочленении манипулятора;  – матрица моментов инерции j-го звена; – матрица моментов инерции j-го звена;  – след полученной матрицы. Коэффициенты определяются равенством – след полученной матрицы. Коэффициенты определяются равенством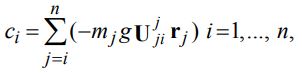 (42) где  – масса j -го звена; – матрица описывает изменения положения i звена, возникающие при движении в j сочленении манипулятора; – масса j -го звена; – матрица описывает изменения положения i звена, возникающие при движении в j сочленении манипулятора;  – вектор центра масс i звена в собственной системе отсчёта, – вектор центра масс i звена в собственной системе отсчёта,  – сила тяжести. – сила тяжести.5.3 Формулировка обратной динамики в MatLab В этой части речь идет о численном решении уравнений руки манипулятора, составляющих вектор крутящих моментов приводов в зависимости от того, является ли соединение ротоидным или призматическим через интерфейс MatLab. Обратная динамика робота-манипулятора любой степени свободы с использованием динамической формулировки Лагранжа-Эйлера (J. J. Uicker, "On the dynamic analysis of spatial linkages using 4 x 4 matrices," Ph.D. dissertation, Northwestern Univ., Aug. 1965). Входными данными являются переменные суставного пространства (положение сустава, скорость и ускорения), а выходными данными являются крутящие моменты/силы в суставах. Код использует дистальные параметры DH манипулятора. Существует только один входной файл: текстовый файл (dhParam.txt), который получает от пользователя дистальные параметры DH манипулятора, а также необходимо ввести скорости и ускорения суставов. Структура кода приведена ниже: 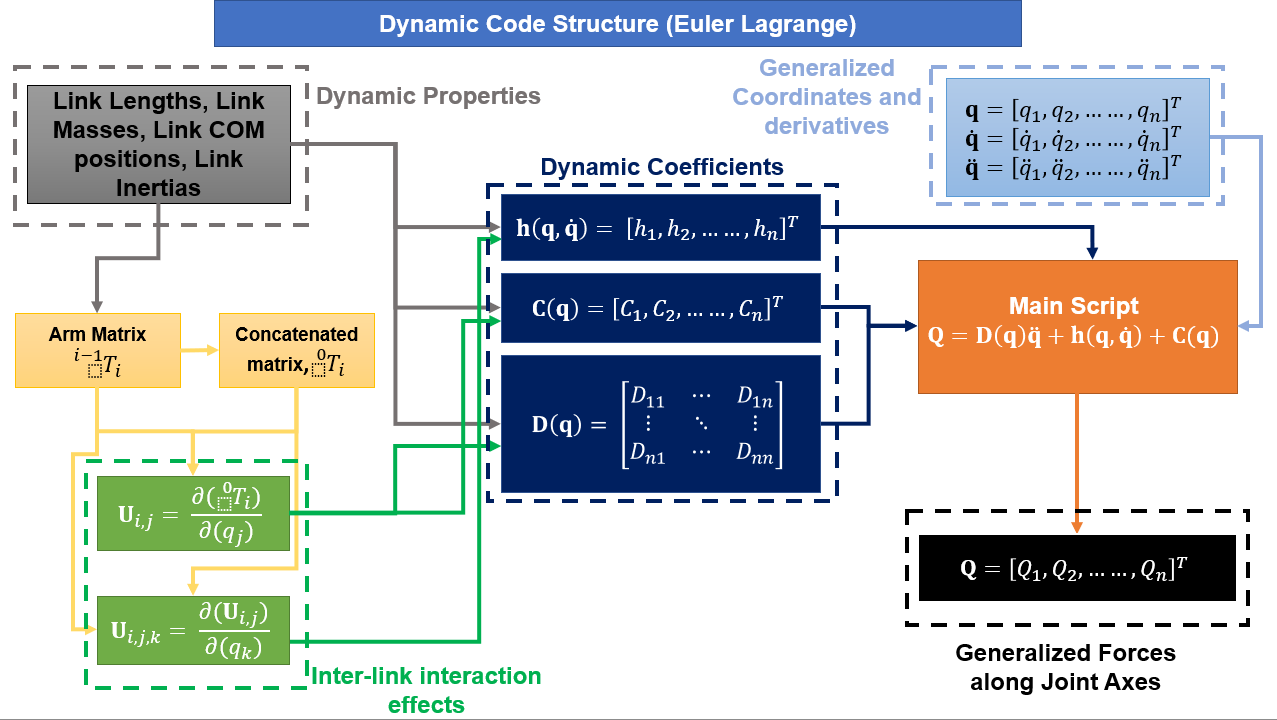 Рис. 11. Динамическая структура кода (Эйлер Лагранж) Объяснение скриптов, включенных в репозиторий: 1). ArmMatrix.m вычисляет однородные матрицы преобразования от одного кадра к соседнему кадру, в то время как T_Concat.m вычисляет конкатенированную матрицу от начального кадра к конечному кадру. 2). inv_dynamics_Euler_Lagrange.m — это основной скрипт, который необходимо выполнить для вычисления крутящих моментов в суставах. Поскольку это код обратной динамики, выходными данными будут крутящие моменты (в случае вращательных шарниров) и силы (в случае призматических шарниров) вдоль осей шарнира. Формулировка Эйлера-Лагранжа выполняется в матричной форме, где нам нужно вычислить матрицу инерционного ускорения, матрицу центробежной силы и силы Кориолиса, а также матрицу гравитационной нагрузки. 3). inertia_acceleration_matrix.m — это функция, которая вычисляет матрицу инерционного ускорения. Каждый член этой матрицы в основном означает реактивный крутящий момент/силу, воздействующую на конкретное соединение/звено из-за ускорения другого соединения/звена. Эта матрица всегда симметрична и положительно определена. 4). centri_cor_force_matrix.m — это функция, которая вычисляет матрицу центробежной силы и силы Кориолиса. Каждый член этой матрицы вычисляет центробежную силу и силу Кориолиса, создаваемую одним шарниром/звеном из-за скорости двух других шарниров/звеньев. Эта матрица является самой затратной в вычислительном отношении, и для приложений с низкими скоростями ею можно пренебречь. 5). gravity_loading_matrix.m — это функция, которая вычисляет матрицу гравитационной нагрузки, каждый член которой соответствует рассмотрению потенциальной энергии каждого звена из-за гравитации. 6). U1_matrix.m — это функция, которая вычисляет влияние на положение и ориентацию конкретного звена из-за движения двух других звеньев. По сути, это матрица. Функция в основном вычисляет все такие возможные матрицы (например, движение 2-го и 3-го суставов в манипуляторе не окажет никакого влияния на положение и ориентацию базового сустава, вместо этого будет наоборот) и группирует их в тензор (матрицу ячеек) и возвращает матрицу ячеек при вызове в основном скрипте. 7). U_matrix.m — это функция, которая вычисляет влияние движения одного звена/соединения на положение и ориентацию другого звена. Он вычисляет матрицу так же, как U1_matrix.m. 8). inertia_matrix.m — это функция, которая вычисляет матрицу/тензор псевдоинерции каждой ссылки в манипуляторе. Момент инерции массы звена рассчитывается по отношению к раме дистального шарнира звена. Эта формулировка имеет вычислительную сложность  , что делает ее вычислительно неэффективной и непригодной для таких приложений, как тестирование конструкции контроллера в реальном времени, хотя это высокоструктурированный алгоритм. , что делает ее вычислительно неэффективной и непригодной для таких приложений, как тестирование конструкции контроллера в реальном времени, хотя это высокоструктурированный алгоритм.Для выполнения сценария inv_dynamics_Euler_Lagrange.m на нашем манипуляторе с 5 степенями свободы мы должны произвольно выбрать положение манипулятора, определить параметры DH, скорости и тип рычажного соединения (0/1) каждого сустава через файл dhParam.txt. Затем в основном скрипте вводим геометрические характеристики тел нашего робота-манипулятора (Табл. 1). 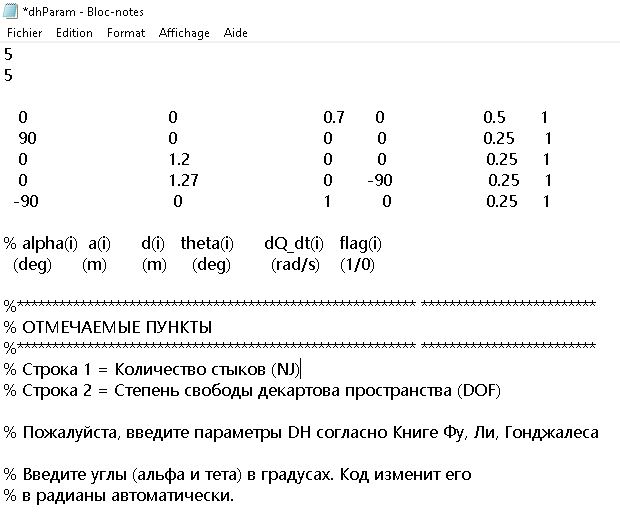 Рис. 12. Настройка текстового файла После запуска основного скрипта получаем координаты обобщенных сил (или моментов) :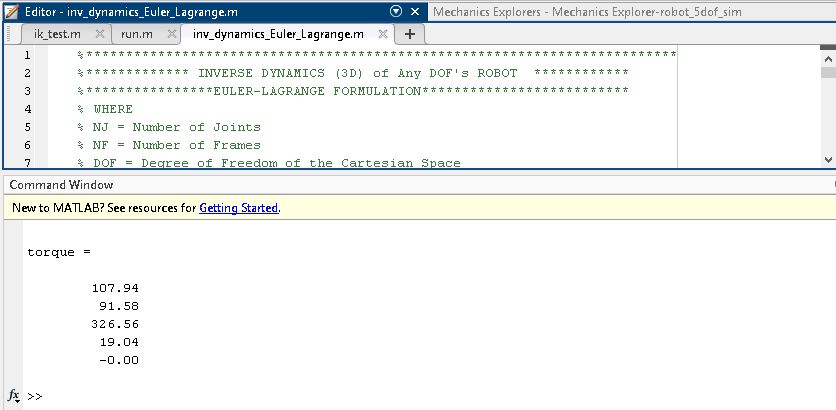 Рис. 13. Обобщенные силы или моменты в определенном положении 5.4 Прямая динамика Нас интересует прямая динамика для имитации движения манипулятора, необходимого для получения максимально необходимого выходного крутящего момента привода. Зная крутящий момент, приложенный к приводам, мы можем найти угловое ускорение каждого привода. Затем это ускорение интегрируется по временному шагу для получения скоростей и положений. Для решения прямой задачи динамики уравнение (38) примет следующий вид: 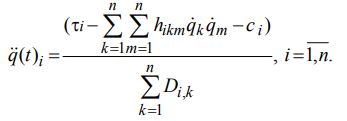 (43) Значения обобщённой переменной и её производной вычисляются следующим образом:  (44) (44) (45) (45)где  – изменение времени. – изменение времени.6. Рабочее пространство Решение прямой задачи о положении позволяет определить положение и ориентацию в пространстве схвата манипулятора, удерживаемого им инструмента или транспортируемого объекта при условии, что известны значения обобщенных координат манипулятора  , ,  . Эти значения могут изменяться в определенных пределах, которые обусловлены конструкцией механизма, или их специально назначают из соображений безопасности работы манипулятора: . Эти значения могут изменяться в определенных пределах, которые обусловлены конструкцией механизма, или их специально назначают из соображений безопасности работы манипулятора: Совокупность этих условий определяет область Sq изменения обобщенных координат. Поскольку каждому сочетанию обобщенных координат соответствует некоторое положение схвата (объекта манипулирования), области Sq изменения обобщенных координат соответствует некоторая область Sr в пространстве рабочей сцены, в которой может находиться схват. Эту область называют рабочим пространством манипулятора (а также рабочей зоной, зоной достижимости). Ч  тобы нарисовать трехмерное рабочее пространство нашего робота-манипулятора, мы запускаем наш код MatLab, в котором мы определяем ограничивающие углы различных суставов.  Рис. 13. Рабочее пространство манипулятора 7. 3D-моделирование робота-манипулятора Я   спроектировал манипулятора робота с помощью программного обеспечения для 3D-моделирования Solidworks. Манипулятор имеет 5 степеней свободы при соблюдении размеров таблицы 1. Для облегчения управления соединениями мы подключим сервоприводы. Для первых 3 осей, талии, плеча и локтя, мы использовали сервоприводы MG996R (черный), а для других 2 осей, поворота запястья и шага запястья, а также для захвата мы использовали микросервоприводы меньшего размера SG90 (синий). спроектировал манипулятора робота с помощью программного обеспечения для 3D-моделирования Solidworks. Манипулятор имеет 5 степеней свободы при соблюдении размеров таблицы 1. Для облегчения управления соединениями мы подключим сервоприводы. Для первых 3 осей, талии, плеча и локтя, мы использовали сервоприводы MG996R (черный), а для других 2 осей, поворота запястья и шага запястья, а также для захвата мы использовали микросервоприводы меньшего размера SG90 (синий).Рис. 14. А Рис. 14. Б На рисунках 14 А и Б показан робот-манипулятор с разных ракурсов. Сервопривод (сервомашинка) состоит из двигателя постоянного тока и электроники, которая обеспечивает замкнутый контур для управления углом поворота вала двигателя. Управляющий сигнал для сервопривода подается в виде импульсов переменной ширины, соответствующих желаемому углу поворота. Для поддержания заданного положения сигнал должен быть периодическим с частотой от 50 до 100 Гц. Максимальное значение угла поворота может варьироваться в зависимости от модели сервопривода. Заключение В данной курсовой работе представлено моделирование, кинематическое и динамическое исследование робота-манипулятора с 5 степенями свободы. Мы уделяем больше внимания обратным точкам в кинематике и динамике, чтобы решить проблему во время моделирования. Кроме того, во время 3D-моделирования робота мы внедрили сервоприводы, которые будут разработаны в другой курсовой работе, в процесс системы управления. Приложение При разработке проекта, в дополнение к ранее упомянутым, также использовалось программное обеспечение Maple, пакет коммерческих математических приложений для общего пользования, который сочетает в себе язык программирования с интерфейсом, позволяющим пользователям писать математические формулы, используя традиционные математические обозначения. Это сделало численный и символьный расчет используемых матриц и уравнений более простым и быстрым. Список используемой литературы Яцун, С.Ф. Математическое моделирование плавающего робота / С.Ф. Яцун, П.А. Безмен, Г.В. Климов, и др. // Управляемые вибрационные технологии и машины. Ч. 2. Курск: Курский государственный технический университет, 2010. – С. 265-269. Кинематическое и динамическое исследование робота-манипулятора // poznayka.org: сайт. – URL: https://poznayka.org/s111162t2.html (дата обращения: 10.02.2023). – Текст: электронный. Булгаков А.Г. Промышленные роботы. Кинематика, динамика, контроль и управление. Сер.: Библиотека инженера / А.Г. Булгаков, В.А. Воробьев. – М.: СОЛОНПРЕСС, 2007. – 488 с. Alain Liégeois. Modélisation et commande des robots manipulateurs. Techniques de l´ingénieur, page 3, Juin 2000. M.Murray Richard, Zexiang Li, S.Shankar Sastry, and S.Shankara Sastry. A Mathematical Introduction to Robotic Manipulation. CRC Press, 1994. Cossalter, Vittore (2006). Meccanica applicata alle macchine, Libreria Progetto, Padova, 5 edizione. | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
