ответы. Понятие нейрокомпьютера. Виды нейрокомпьютеров
 Скачать 1.89 Mb. Скачать 1.89 Mb.
|

Нейрокомпьютеров-вычисл. системы 6-го поколения, кот. состоят из большого числа параллельно работающих простых вычис.элементов (нейронов). Эл-ы связаны между собой, образуя нейронную сеть. Они выполняют единообразные вычисл. действия и не требуют внешнего управления. Большое число параллельно работающих вычисл.эл-ов обеспечивают высокое быстродействие. В наст. время разработка нейрокомпьютеров ведется в большинстве промышленно развитых стран. Нейрокомпьютеры позволяют с высокой эффективностью решать целый ряд интеллектуальных задач. Это задачи:
Нейрокомпьютеры отличаются от ЭВМ предыдущих поколений не просто большими возможностями. Принципиально меняется способ использования машины. Место прогр-я занимает обучение, нейрокомпьютер учится решать задачи. Обучение - корректировка весов связей, в результате которой каждое входное воздействие приводит к формированию соответствующего выходного сигнала. После обучения сеть может применять полученные навыки к новым входным сигналам. При переходе от программирования к обучению повышается эффективность решения интеллектуальных задач. Примеры:
Иску́сственныйнейро́н (Математическийнейрон Маккалока — Питтса, Формальныйнейрон) — узел искусственной нейронной сети, являющийся упрощённой моделью естественного нейрона. Математически, искусственный нейрон обычно представляют, как некоторую нелинейную функцию от единственного аргумента — линейной комбинации всех входных сигналов. Данную функцию называют функциейактивации или функциейсрабатывания, передаточнойфункцией. Полученный результат посылается на единственный выход. Такие искусственные нейроны объединяют в сети — соединяют выходы одних нейронов с входами других. Искусственные нейроны и сети являются основными элементами идеального нейрокомпьютера. Формальныйнейрон - в нейронных сетях - процессорный элемент, преобразователь данных, получающий входные данные и преобр-й их в соответс. с заданной функцией и параметрами. Форм. нейрон работает с дискретным временем. 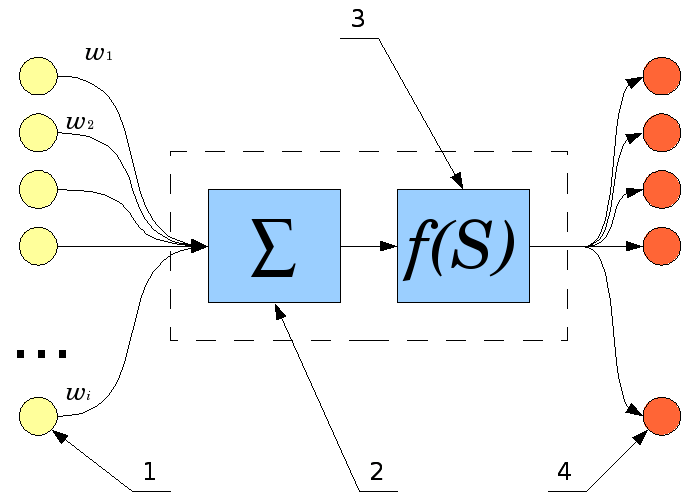 Схема искусственного нейрона 1.Нейроны, выходные сигналы которых поступают на вход данному 2.Сумматор входных сигналов 3.Вычислитель передаточной функции 4.Нейроны, на входы которых подаётся выходной сигнал данного 5. Математически нейрон предст. собой взвешенный сумматор, единств.выход которого опр-ся через его входы и матрицу весов следующим образом: Здесь
Активационная функция нейрона определяет нелинейное преобразование, осуществляемое нейроном. Существует множество видов активационных функций, но более всего распространены следующие четыре: 1. Пороговая функция. На рис. 7.2, а приведен ее график. 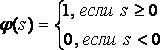 . (7.5) . (7.5)Первая из введенных активационных функций, она была описана в работе Мак-Каллока и Питтса. В честь этого модель нейрона с пороговой активационной функцией называется моделью Мак-Каллока-Питтса. 2. Кусочно-линейная функция. Она изображена на рис. 7.2, б и описывается следующей зависимостью: 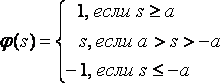 . (7.6) . (7.6)В данном случае a=1, и коэффициент наклона линейного участка выбран единичным, а вся функция может интерпретироваться как аппроксимация нелинейного усилителя. При бесконечно большом коэффициенте наклона линейного участка функция вырождается в пороговую. В большинстве типов искусственных нейронных сетей используются нейроны с линейной активационной функцией 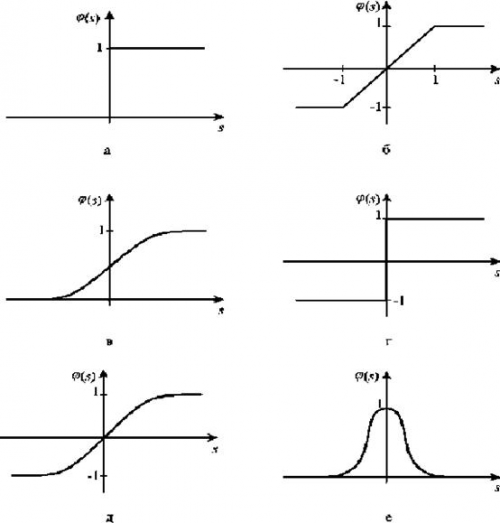 Рис. 7.2. Типы активационных функций а), г) пороговая; б) линейная; в) сигмоидальная; д) тангенциальная; е) радиально-базисная активационные функции
Иску́сственная нейро́нная се́ть (ИНС) — математическая модель, а также её программная или аппаратная реализация, построенная по принципу организации и функционирования биологических нейронных сетей — сетей нервных клеток живого организма. Это понятие возникло при изучении процессов, протекающих в мозге, и при попытке смоделировать эти процессы. Первой такой попыткой были нейронные сети У. Маккалока и У. Питтса. После разработки алгоритмов обучения получаемые модели стали использовать в практических целях: в задачах прогнозирования, для распознавания образов, в задачах управления и др. ИНС представляют собой систему соединённых и взаимодействующих между собой простых процессоров (искусственных нейронов). Такие процессоры обычно довольно просты (особенно в сравнении с процессорами, используемыми в персональных компьютерах). Каждый процессор подобной сети имеет дело только с сигналами, которые он периодически получает, и сигналами, которые он периодически посылает другим процессорам. И, тем не менее, будучи соединёнными в достаточно большую сеть с управляемым взаимодействием, такие локально простые процессоры вместе способны выполнять довольно сложные задачи. С точки зрения машинного обучения, нейронная сеть представляет собой частный случай методов распознавания образов, дискриминантного анализа, методов кластеризации и т. п. С математической точки зрения, обучение нейронных сетей — это многопараметрическая задача нелинейной оптимизации. С точки зрения кибернетики, нейронная сеть используется в задачах адаптивного управления и как алгоритмы для робототехники. С точки зрения развития вычислительной техники и программирования, нейронная сеть — способ решения проблемы эффективного параллелизма[2]. А с точки зрения искусственного интеллекта, ИНС является основой философского течения коннективизма и основным направлением в структурном подходе по изучению возможности построения (моделирования) естественного интеллекта с помощью компьютерных алгоритмов. Нейронные сети не программируются в привычном смысле этого слова, они обучаются. Возможность обучения — одно из главных преимуществ нейронных сетей перед традиционными алгоритмами. Технически обучение заключается в нахождении коэффициентов связей между нейронами. В процессе обучения нейронная сеть способна выявлять сложные зависимости между входными данными и выходными, а также выполнять обобщение. Это значит, что в случае успешного обучения сеть сможет вернуть верный результат на основании данных, которые отсутствовали в обучающей выборке, а также неполных и/или «зашумленных», частично искаженных данных. 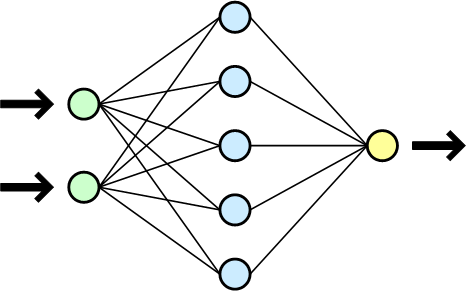 Схема простой нейросети. Зел. цветом обозн. входные нейроны, гол.— скрытые нейроны, жёлтым — выходной нейрон.
Некоторые свойства нейронных сетей. 1. Обучение Искусственные нейронные сети могут менять свое поведение в зависимости от внешней среды. Этот фактор в большей степени, чем любой другой, ответствен за тот интерес, который они вызывают. После предъявления входных сигналов (возможно, вместе с требуемыми выходами) они самонастраиваются, чтобы обеспечивать требуемую реакцию. Было разработано множество обучающих алгоритмов, каждый со своими сильными и слабыми сторонами. Все еще существуют проблемы относительно того, чему сеть может обучиться и как обучение должно проводиться. 2. Обобщение Отклик сети после обучения может быть до некоторой степени нечувствителен к небольшим изменениям входных сигналов. Эта внутренне присущая способность видеть образ сквозь шум и искажения жизненно важна для распознавания образов в реальном мире. Она позволяет преодолеть требование строгой точности, предъявляемое обычным компьютером, и открывает путь к системе, которая может иметь дело с тем несовершенным миром, в котором мы живем. Важно отметить, что искусственная нейронная сеть делает обобщения автоматически благодаря своей структуре, а не с помощью использования «человеческого интеллекта» в форме специально написанных компьютерных программ. 3. Абстрагирование Некоторые из искусственных нейронных сетей обладают способностью извлекать сущность из входных сигналов. Например, сеть может быть обучена на последовательности искаженных версий буквы «А». После соответствующего обучения предъявление такого искаженного примера приведет к тому, что сеть породит букву совершенной формы (в данном случае букву «А»). В некотором смысле она научится порождать то, что никогда не видела. Способность извлекать идеальные прототипы является у людей весьма ценным качеством. 4. Применимость Искусственные нейронные сети не являются панацеей. Они, очевидно, не годятся для выполнения таких задач, как начисление заработной платы, однако они незаменимы в большом классе других задач, с которыми плохо или вообще не справляются обычные вычислительные системы.
НС хорошо подходят для распознавания образов и решения задач классификации, оптимизации и прогнозирования. Ниже приведен перечень возможных промышленных применений нейронных сетей, на базе которых либо уже созданы коммерческие продукты, либо реализованы демонстрационные прототипы. Банки и страховые компании:
Административное обслуживание:
Нефтяная и химическая промышленность:
Военная промышленность и аэронавтика:
Промышленное производство:
Служба безопасности:
Биомедицинская промышленность:
Телевидение и связь:
Рассмотрим иерархическую сетевую структуру, в которой связанные между собой нейроны (узлы сети) объединены в несколько слоев (Рис. 6.1). На возможность построения таких архитектур указал еще Ф.Розенблатт, однако им не была решена проблема обучения. Межнейронные синаптические связи сети устроены таким образом, что каждый нейрон на данном уровне иерархии принимает и обрабатывает сигналы от каждого нейрона более низкого уровня. Таким образом, в данной сети имеется выделенное направление распостранения нейроимпульсов - от входного слоя через один (или несколько) скрытых слоев к выходному слою нейронов. Нейросеть такой топологии мы будем называть обобщенным многослойным персептроном или, если это не будет вызывать недоразумений, просто персептроном. 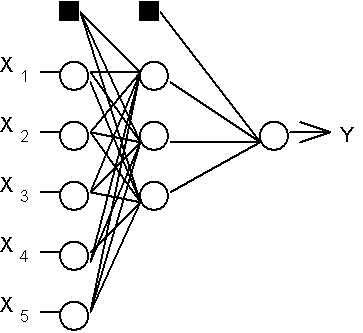 Рис.6.1. Структура многослойного персептрона с пятью входами, тремя нейронами в скрытом слое, и одним нейроном выходного слоя. Персептрон представляет собой сеть, состоящую из нескольких последовательно соединенных слоев формальных нейронов МакКаллока и Питтса. На низшем уровне иерархии находится входной слой, состоящий из сенсорных элементов, задачей которого является только прием и распространение по сети входной информации. Далее имеются один или, реже, несколько скрытых слоев. Каждый нейрон на скрытом слое имеет несколько входов, соединенных с выходами нейронов предыдущего слоя или непосредственно со входными сенсорами X1..Xn, и один выход. Нейрон характеризуется уникальным вектором весовых коэффициентов w. Веса всех нейронов слоя формируют матрицу, которую мы будем обозначать V или W. Функция нейрона состоит в вычислении взвешенной суммы его входов с дальнейшим нелинейным преобразованием ее в выходной сигнал: 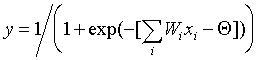 (6.1) (6.1) Выходы нейронов последнего, выходного, слоя описывают результат классификации Y=Y(X). Особенности работы персептрона состоят в следующем. Каждый нейрон суммирует поступающие к нему сигналы от нейронов предыдущего уровня иерархии с весами, определяемыми состояниями синапсов, и формирует ответный сигнал (переходит в возбужденное состояние), если полученная сумма выше порогового значения. Персептрон переводит входной образ, определяющий степени возбуждения нейронов самого нижнего уровня иерахии, в выходной образ, определяемый нейронами самого верхнего уровня. Число последних, обычно, сравнительно невелико. Состояние возбуждения нейрона на верхнем уровне говорит о принадлежности входного образа к той или иной категории. Традиционно рассматривается аналоговая логика, при которой допустимые состояния синаптических связей определяются произвольными действительными числами, а степени активности нейронов - действительными числами между 0 и 1. Иногда исследуются также модели с дискретной арифметикой, в которой синапс характеризуется двумя булевыми переменными: активностью (0 или 1) и полярностью (-1 или +1), что соответствует трехзначной логике. Состояния нейронов могут при этом описываться одной булевой переменной. Данный дискретный подход делает конфигурационное пространство состояний нейронной сети конечным (не говоря уже о преимуществах при аппаратной реализации). Здесь будет в основном описываться классический вариант многослойной сети с аналоговыми синапсами и сигмоидальной передаточной функцией нейронов, определяемой формулой (6.1).
По своей организации и функц. назначению иск. нейронная сеть с неск. входами и выходами выполняет некоторое преобразование входных стимулов - сенсорной информации о внешнем мире - в выходные управляющие сигналы. Число преобразуемых стимулов равно n - числу входов сети, а число выходных сигналов соответствуе числу выходов m. Совокупность всевозможных входных векторов размерности n образует векторное пространство X, которое мы будем называть признаковым пространством (При рассмотрении соответсвующих пространств предполагается использование обычных векторных операций сложения и умножения на скаляр (подробнее см. Лекцию 2). Аналогично, выходные вектора также формируют признаковое пространство, которое будет обозначаться Y. Теперь нейронную сеть можно мыслить, как некоторую многомерную функцию F: X Y , аргумент которой принадлежит признаковому пространству входов, а значение - выходному признаковому пространству. При произвольном значении синаптических весовых коэффициентов нейронов сети функция, реализуемая сетью также произвольна. Для получения требуемой функции необходим специфический выбор весов. Упорядоченная совокупность всех весовых коэффициентов всех нейронов может быть представлена, как вектор W. Множество всех таких векторов также формирует векторное пространство, называемое пространством состояний или конфигурационным (фазовым) пространством W. Термин "фазовое пространство" пришел из статистической физики систем многих частиц, где под ним понимается совокупность координат и импульсов всех частиц, составляющих систему. Задание вектора в конфигурационном пространстве полностью определяет все синаптические веса и, тем самым, состояние сети. Состояние, при котором нейронная сеть выполняет требуемую функцию, называют обученным состоянием сети W*. Отметим, что для заданной функции обученное состояние может не существовать или быть не единственным. Задача обучения теперь формально эквивалентна построению процесса перехода в конфигурационном пространстве от некоторого произвольного состояния W0 к обученному состоянию. Требуемая функция однозначнно описывается путем задания соотвествия каждому вектору признакового пространства X некоторого вектора из пространства Y. В случае сети из одного нейрона в задаче детектирования границы, рассмотренной в конце третьей Лекции, полное описание требуемой функции достигается заданием всего четырех пар векторов. Однако в общем случае, как например, при работе с видеоизображением, признаковые пространства могут иметь высокую размерность, поэтому даже в случае булевых векторов однозначное определение функции становится весьма громоздким (при условии, конечно, если функция не задана явно, например, формулой; однако для явно заданных функций обычно не возникает потребности представления их нейросетевыми моделями). Во многих практических случаях значения требуемых функций для заданных значений аргумента получаются из эксперимента или наблюдений, и, следовательно, известны лишь для ограниченной совокупности векторов. Кроме того, известные значения функции могут содержать погрешности, а отдельные данные могут даже частично противоречить друг другу. По этим причинам перед нейронной сетью обычно ставится задача приближенного представления функции по имеющимся примерам. Имеющиеся в распоряжении исследователя примеры соответствий между векторами, либо специально отобранные из всех примеров наиболее представительные данные называют обучающей выборкой. Обучающая выборка определяется обычно заданием пар векторов, причем в каждой паре один вектор соотвествует стимулу, а второй - требуемой реакции. Обучение нейронной сети состоит в приведении всех векторов стимулов из обучающей выборки требуемым реакциям путем выбора весовых коэффициентов нейронов. Общая проблема кибернетики, заключающаяся в построении искусственной системы с заданным функциональным поведением, в контексте нейроных сетей понимается, как задача синтеза требуемой искусственной сети. Она может включать в себя следующие подзадачи: 1) выбор существенных для решаемой задачи признаков и формирование признаковых пространств; 2) выбор или разработка архитектуры нейронной сети, адекватной решаемой задаче; 3) получение обучаюшей выборки из наиболее представительных, по мнению эксперта, векторов признаковых пространств; 4) обучение нейронной сети на обучающей выборке. Отметим, что подзадачи 1)-3) во многом требуют экспертного опыта работы с нейронными сетями, и здесь нет исчерпывающих формальных рекомендаций. Эти вопросы рассматриваются на протяжении всей книги в применении к различным нейросетевым архитектурам, с иллюстрациями особенностей их обучения и применения.
Понятие о задаче оптимизации.Возможность применени теории оптимизации и обучению нейронных сетей крайне привлекательна, так как имеется множество хорошо опробованных методов оптимизации, доведенных до стандартных компьютерных программ. Сопоставление процесса обучения с процессом поиска некоторого оптимума также не лишено и биологических оснований, если рассматривать элементы адаптации организма к окружающим условиям в виде оптимального количества пищи, оптимального расходования энергии и т.п. Подробное рассмотрение методов оптимизации выходит за рамки данных лекций, поэтому здесь мы органичимся лишь основными понятиями. Для более подробного знакомства можно порекомендовать книгу Б.Банди. Функция одной действительной переменной f(x) достигает локального минимума в некоторой точке x0, если существует такая d -окрестность этой точки, что для всех x из этой окрестности, т.е. таких, что | x - x0 | < d, имеет место f(x) > f(x0). Без дополнительных предположений о свойствах гладкости функции выяснить, является ли некоторая точка достоверной точкой минимума, используя данное определение невозможно, поскольку любая окрестность содержит континуум точек. При примененнии численных методов для приближенного поиска минимума исследователь может столкнуться с несколькими проблемами. Во-первых, минимум функции может быть не единственным. Во-вторых, на практике часто необходимо найти глобальный, а не локальный минимум, однако обычно не ясно, нет ли у функции еще одного, более глубокого, чем найденный, минимума. Матем. определение локального минимума функции в многомерном пространстве имеет тот же вид, если заменить точки x и x0 на вектора, а вместо модуля использовать норму. Поиск минимума для функции многих переменных (многих факторов) является существенно более сложной задачей, чем для одной переменной. Это связано прежде всего с тем, что локальное направление уменьшения значения функции может не соответствовать направлению движения к точке минимума. Кроме того, с ростом размерности быстро возрастают затраты на вычисление функции. Решение задачи оптимизации во многом является искусством, общих, заведомо работающих и эффективных в любой ситуации методов нет. Среди часто использемых методов можно рекомендовать симплекс-метод Нелдера, некоторые градиентные методы, а также методы случайного поиска. В Приложении 2 для решения задачи оптимизации рассматриваются методы имитации отжига и генетического поиска, относящиеся к семеству методов случайного поиска. В случае, если независимые переменные являются дискретными и могут принимать одно значение из некоторого фиксированного набора, задача многомерной оптимизации несколько упрощается. При этом множество точек поиска становится конечным, а следовательно задача может быть, хотя бы в принципе, решена методом полного перебора. Будем называть оптимизационные задачи с конечным множеством поиска задачами комбинаторной оптимизации. Для комбинаторных задач также существуют методы поиска приближенного решения, предлагающие некоторую стратегию перебора точек, сокращающую объем вычислительной работы. Отметим, что имитация отжига и генетический алгоритм также применимы и к комбинаторной оптимизации. Постановка задачи оптимизации при обучении нейронной сетиПусть имеется нейронная сеть, выполняющая преобразование F:X®Y векторов X из признакового пространства входов X в вектора Y выходного пространства Y. Сеть находится в состоянии W из пространства состояний W. Пусть далее имеется обучающая выборка (Xa,Ya), a = 1..p. Рассмотрим полную ошибку E, делаемую сетью в состоянии W. Отметим два свойства полной ошибки. Во-первых, ошибка E=E(W) является функцией состояния W, определенной на пространстве состояний. По определению, она принимает неотрицательные значения. Во-вторых, в некотором обученном состоянии W*, в котором сеть не делает ошибок на обучающей выборке, данная функция принимает нулевое значение. Следовательно, обученные состояния являются точками минимума введенной функции E(W). Таким образом, задача обучения нейронной сети является задачей поиска минимума функции ошибки в пространстве состояний, и, следовательно, для ее решения могут применяться стандарные методы теории оптимизации. Эта задача относится к классу многофакторных задач, так, например, для однослойного персептрона с N входами и M выходами речь идет о поиске минимума в NxM-мерном пространстве. На практике могут использоваться нейронные сети в состояниях с некоторым малым значением ошибки, не являющихся в точности минимумами функции ошибки. Другими словами, в качестве решения принимается некоторое состояние из окрестности обученного состояния W*. При этом допустимый уровень ошибки определяется особенностями конкретной прикладной задачи, а также приемлимым для пользователя объемом затрат на обучение.
Перцептро́н, или персептрон (англ. perceptron от лат. perceptio — восприятие; нем. perzeptron) — математическая и компьютерная модель восприятия информации мозгом (кибернетическая модель мозга), предложенная Фрэнком Розенблаттом в 1957 году и реализованная в виде электронной машины «Марк-1» в 1960 году. Перцептрон стал одной из первых моделей нейросетей, а «Марк-1» — первым в мире нейрокомпьютером. Несмотря на свою простоту, перцептрон способен обучаться и решать довольно сложные задачи. Основная математическая задача, с которой он справляется, — это линейное разделение любых нелинейных множеств, так называемое обеспечение линейной сепарабельности. Перцептрон состоит из трёх типов элементов, а именно: поступающие от сенсоров сигналы передаются ассоциативным элементам, а затем реагирующим элементам. Таким образом, перцептроны позволяют создать набор «ассоциаций» между входными стимулами и необходимой реакцией на выходе. В биологическом плане это соответствует преобразованию, например, зрительной информации в физиологический ответ от двигательных нейронов. Согласно современной терминологии, перцептроны могут быть классифицированы как искусственные нейронные сети:
Метод обратного распространения ошибки (англ. backpropagation)— метод обучения многослойного перцептрона. Впервые метод был описан в 1974 г. А.И. Галушкиным[1], а также независимо и одновременно Полом Дж. Вербосом[2]. Далее существенно развит в 1986 г. Дэвидом И. Румельхартом, Дж. Е. Хинтоном и Рональдом Дж. Вильямсом[3] и независимо и одновременно С.И. Барцевым и В.А. Охониным (Красноярская группа)[4].. Это итеративный градиентный алгоритм, который используется с целью минимизации ошибки работы многослойного перцептрона и получения желаемого выхода. Основная идея этого метода состоит в распространении сигналов ошибки от выходов сети к её входам, в направлении, обратном прямому распространению сигналов в обычном режиме работы. Барцев и Охонин предложили сразу общий метод («принцип двойственности»), приложимый к более широкому классу систем, включая системы с запаздыванием, распределённые системы, и т. п.[5] Для возможности применения метода обратного распространения ошибки передаточная функция нейронов должна быть дифференцируема. Метод является модификацией классического метода градиентного спуска. 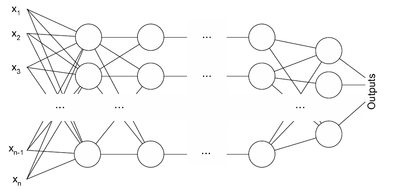 Архитектура многослойного перцептрона Алгоритм: BackPropagation
Для всех d от 1 до m:
Для каждого узла j уровня l вычислить
где |