Задания. Практическая работа 12 Построение переходных процессов. Расчет настроек регулятора. Цель работы
 Скачать 90.2 Kb. Скачать 90.2 Kb.
|

|
Практическая работа №12 «Построение переходных процессов. Расчет настроек регулятора». 1. Цель работы: 1.1. Изучить построение переходного процесса с методом Акульшина. 1.2. Научиться рассчитывать настроечные параметры регуляторов. 2. Общие сведения. 2.1. Метод Акульшина относится к приближенным методам построения переходных процессов и позволяет находить вид переходного процесса под воздействием ступенчатых входных сигналов (рис. 1). 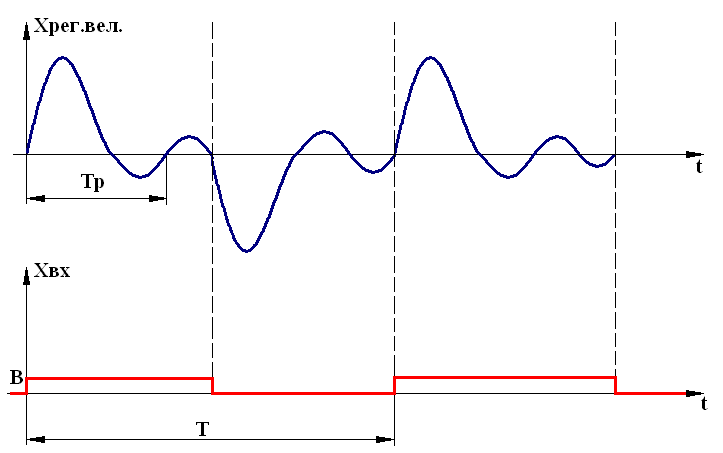 Рис.1. Построение переходного процесса. При этом должно выполняться следующее условие:  Входной сигнал преобразуется в ряд Фурье для прямоугольной волны вида:  где  . .Затем строиться годограф замкнутой системы:  . . Далее оцениваем влияние, оказываемое каждой гармоникой, для этого разложим хрег в ряд:  По принципу суперпозиции реакция системы на сумму входных воздействий равна сумме реакций на каждое входной воздействие. Оценивается воздействие каждой гармоники входного сигнала По принципу суперпозиции реакция системы на сумму входных воздействий равна сумме реакций на каждое входной воздействие. Оценивается воздействие каждой гармоники входного сигналаПри практически используемых степенях затухания переходных процессов, он затухает не более, чем за три рабочих периода Тр. Тогда Т=6Тр,  Рабочую частоту находят, как показано на рис. 2. Для этого необходимо построить АЧХ замкнутой системы.  Рис. 2. Построение АЧХ системы. Затем в интервале  строят переходной процесс. Достаточная точность при этом достигается при строят переходной процесс. Достаточная точность при этом достигается при  гармониках хвх. гармониках хвх.2.2. Алгоритм функционирования регулятора (закон регулирования) – уравнение, устанавливающее связь между входными и выходными величинами.  Рис. 3. Структурная схема регулятора. Классификация регуляторов: астатические и статические прямого и непрямого действия с корректирующими элементами и без них с постоянной или пропорциональной скоростью сервомотора 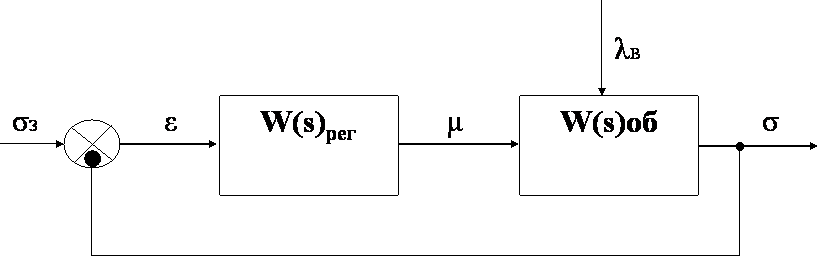 Рис. 4. Структурная схема. При автоматизации технологических процессов важнейшей является задача стабилизации выходных координат объектов регулирования. Для этого в основном используются одноконтурные системы регулирования, состоящие из объекта и регулятора (рис. 4). При этом необходимо обеспечить системе определенный запас устойчивости и удовлетворительное качество переходных процессов. Реализовать это возможно с помощью расчета настроечных параметров регуляторов. Методов и алгоритмов расчета последних существует большое количество, однако условно их можно разделить на две группы. Первая – расчет оптимальных параметров настройки, сопряженные с выполнением значительного объема вычислительных процедур. И вторая, позволяющая рассчитать приближенные параметры. Два наиболее характерных метода: метод расширенных амплитудно-частотных характеристик; метод незатухающих колебаний. Рассмотрим типовые промышленные регуляторы. Интегральный (И-регулятор). Передаточные функции И-регулятора:  И-регулятор имеет один настроечный параметр – С0. С увеличением С0 увеличивается время переходного процесса и уменьшаются динамические ошибки Пропорциональный (П-регулятор) Передаточная функция WП(s) = С1 П-регулятор имеет один настроечный параметр – С1. Пропорционально-интегральный регулятор (ПИ-регулятор). Передаточная функция ПИ-регулятора:  Пропорционально-интегрально-дифференциальный регулятор (ПИД-регулятор). Передаточная функция ПИ-регулятора:  Рассмотрим метод незатухающих колебаний. Определение настроек регулятора производится в два этапа. На первом определяется критическая частота  и критическая настройка П-регулятора и критическая настройка П-регулятора  , при которой в замкнутой САР возникают незатухающие колебания. На втором – определение по настроечных параметров регуляторов по приближенным формулам. , при которой в замкнутой САР возникают незатухающие колебания. На втором – определение по настроечных параметров регуляторов по приближенным формулам.Определение и .Если разомкнутая система устойчива (или нейтральна) и ее АФХ проходит через точку (1, j0), то замкнутая САР будет находиться на границе устойчивости. Условие нахождения системы на границе устойчивости, имеет вид:  или, учитывая, что  , получаем , получаем где  - амплитудно-частотная характеристика и фазо-частотная характеристика характеристика объекта и регулятора соответственно. - амплитудно-частотная характеристика и фазо-частотная характеристика характеристика объекта и регулятора соответственно.Поскольку АФХ П-регулятора имеет вид  тогда для расчета критической частоты и критической настройки П-регулятора получим два уравнения: Из второго уравнения находится значение , затем из первого по формуле: Определение настроек регуляторов. Расчет настроек регуляторов по и осуществляется по приближенным формулам. Для П-регулятора:  Для ПИ-регулятора:  Ткр – период незатухающих колебаний САР. Для ПИД-регулятора:  где Тиз, Тпр – время изодрома и предварения. Приближенные формулы определяют настройки регуляторов, обеспечивающие степень затухания процесса регулирования более чем 0,75. Приближенные настройки регулятора можно найти по параметрам динамики объекта: времени запаздывания , постоянной времени Т и коэффициента усиления k. П-регулятор.  ПИ-регулятор.  ПИД-регулятор.  Приближенные формулы определяют настройки регуляторов, обеспечивающие степень затухания процесса регулирования более чем 0,75. 3. Задание на практическую работу. 3.1. Для типовых элементарных динамических звеньев, заданных передаточными функциями, произвести построение переходного процесса при ступенчатом единичном воздействии методом Акульшина. Оценить погрешность по сравнению с точным решением дифференциального уравнения. Параметры звеньев указаны в таблице. Передаточные функции звеньев: Апериодическое звено  Реальное дифференцирующее звено  Звено 2-го порядка  3.2. Динамические свойства объекта заданы дифференциальным уравнением вида: a0xвых’’’+ a1xвых’’+ a2xвых’+ a3xвых = b0xвх Коэффициенты уравнения указаны в таблице. Рассчитать приближенные настроечные параметры П-,ПИ-,ПИД-регуляторов методом незутухающих колебаний. Для указанного регулятора методом Акульшина построить переходный процесс в замкнутой системе по управляющему воздействию. Оценить качество переходного процесса и сравнить с заданным. 4. Варианты заданий на практическую работу.
5. Контрольные вопросы. 1. Для чего применяется метод Акульшина? 2. В чем заключается сущность метода Акульшина? 3. Как рассчитывается рабочая частота? 4. Приведите передаточные функции И-регулятора. 5. Приведите передаточные функции ПИ-регулятора. 6. Приведите передаточные функции ПИД-регулятора. 7. Как осуществляется расчет настроек регулятора методом незатухающих колебаний? 8. Как осуществляется расчет настроек регулятора по параметрам динамики объекта? |