теория сигналов Согласованный фильтр матлаб. Преподаватель доц., к т. н. Монаков А. А. должность, уч степень, звание подпись, дата инициалы, фамилия отчет о лабораторной работе 1 математическое моделирование обнаружителя на основе согласованного фильтра по курсу теория сигналов
 Скачать 218.33 Kb. Скачать 218.33 Kb.
|

|
МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ РОССИЙСКОЙ ФЕДЕРАЦИИ федеральное государственное автономное образовательное учреждение высшего образования «САНКТ-ПЕТЕРБУРГСКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ АЭРОКОСМИЧЕСКОГО ПРИБОРОСТРОЕНИЯ» КАФЕДРА РАДИОТЕХНИЧЕСКИХ СИСТЕМОТЧЕТ ЗАЩИЩЕН С ОЦЕНКОЙ ПРЕПОДАВАТЕЛЬ доц., к.т.н. Монаков А.А. должность, уч. степень, звание подпись, дата инициалы, фамилия ОТЧЕТ О ЛАБОРАТОРНОЙ РАБОТЕ №1 МАТЕМАТИЧЕСКОЕ МОДЕЛИРОВАНИЕ ОБНАРУЖИТЕЛЯ НА ОСНОВЕ СОГЛАСОВАННОГО ФИЛЬТРАпо курсу: ТЕОРИЯ СИГНАЛОВРАБОТУ ВЫПОЛНИЛ СТУДЕНТ ГР. № 2520 Комин А.О подпись, дата инициалы, фамилия Санкт-Петербург 2018 1 Цель работы Произвести моделирование обнаружителя сигналов на согласованном фильтре в среде MATLAB Ход работы Ниже, в таблице 1 приведен сигнал, подаваемый на вход обнаружителя. Таблица 1 – Вариант задания
В среде MATLAB формируется сигнал ( Рисунок 4.1 А)). Далее строится согласованный фильтр с собственной импульсной характеристикой, в следствии прохождения через который, получается сигнал, сдвинутый вдоль оси времени t (Рисунок 4.1 Б)). Энергия сигнала не изменилась. Формируется пороговое устройство. Задается вероятность ложной тревоги и находится оптимальное значение отношения сигнал/шум. После прохождения через согласованный фильтр рассчитывается по формуле вероятность правильного обнаружения сигнала и строится характеристика обнаружения (Рисунок 4.2). 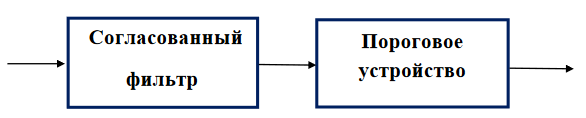 Рисунок 2.1 – Классический обнаружитель сигналов Код программы close all; clear all; % исходные данные T = 2;% период сигнала ti = 0.5*T; % длительность импульса % построение графика функции на интервале времени от о до Т % интервал значений для построения с периодом дискретизации dt dt = ti/1000; tk = 0:dt:T; % построение сигнала % прямоугольный видеоимпульс для создания нулевых значений сигнала на % интервале ti x0 = rectpuls(tk-3*ti/2,ti); x1 = flip(x0); s = 0.5*(1+(cos(pi*((2*tk-ti)/ti)))).*x1; % выражение определяющее форму импульса figure(1) plot(tk,s) % график импульса grid % сетка на графике title('Сигнал'); %название графика xlabel('t'); %подпись оси абсцисс ylabel('S(t)') %подпись оси ординат % Нахождение энергии импульса Е st = @(x) (0.5*(1+(cos(pi*((2*x-ti)/ti))))).^2; E = integral(st,0,ti); % Прохождение сигнала через СФ t = 0:dt:ti; s = 0.5*(1+(cos(pi*((2*t-ti)/ti)))); h = s(end:-1:1); % импульсная характеристика согласованного фильтра y = conv(s,h)*dt; % фильтрация figure(2) plot(tk,y) % график сигнала на выходе СФ grid title('Сигнал на выходе СФ'); xlabel('t'); ylabel('s(t)') nmax = find (tk==ti); F = 0.001; % вероятность ложной тревоги P=0; for q2=1:1:20 % отношение сигнал/шум в разах q2d=10^(0.1*(q2-1)); % отношение сигнал/шум в дБ P=0; N0 = E/q2d; % мощность шума D = N0/dt; % дисперсия шума Z0 = sqrt(2*N0*E)*erfcinv(2*F); % пороговое значение for ii = 1:1000 % берем 1000 реализаций n = sqrt(D).*randn(size(s)); % значения отсчетов шума sn = s + n; % сигнал с шумовой составляющей Z = conv(sn,h)*dt; % прохождение сигнала через СФ if Z(1,nmax) > Z0 P = P+1; end end P_itog(q2) = P/1000; Z0_itog(q2) = Z0; N0_itog(q2) = N0; end q2=1:1:20; Dpo = 0.5*erfc((Z0_itog-E)./sqrt(2*N0_itog*E)); % аналитическая формула для % вероятности правильного обнаружения figure(3) plot(q2,P_itog,'g',q2,Dpo) grid title('Характеристика обнаружения'); xlabel('q'); ylabel('D') Графики 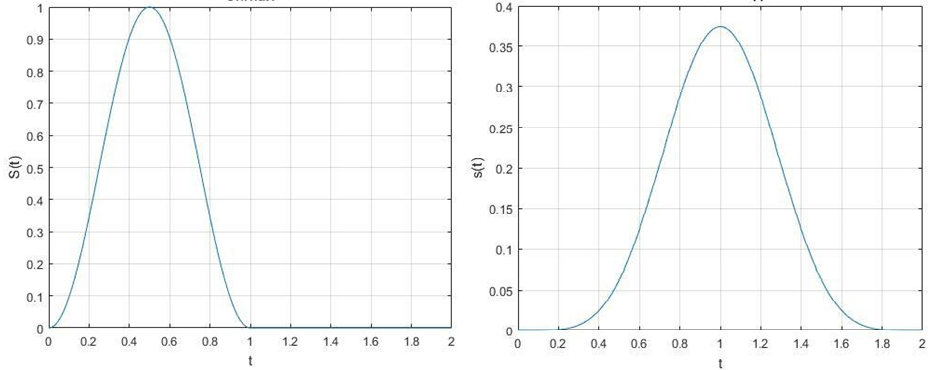 А) Б) Рисунок 4.1 – А) Исходный сигнал; Б) Сигнал на выходе СФ  Рисунок 4.2 – Вероятность правильного обнаружения сигнала от отношения сигнал/шум Выводы Из графика на рисунке 4.1 мы видим, что сигнал на выходе согласованного фильтра достигает своего максимального значения в то время, когда заканчивается сигнал, подаваемый на его вход. Чем больше отношение сигнал/шум, тем выше вероятность правильного обнаружения. Из рисунка 4.2 мы можем пронаблюдать, что когда значение отношения сигнал/шум становится равным 16, тогда вероятность правильного обнаружения становится равной единице. |