Реферат по Автоматизированному электроприводу. Регулирование скорости движения троллейбусов, трамваев, электровозов, тепловозов
 Скачать 122.85 Kb. Скачать 122.85 Kb.
|

Реферат по Автоматизированному электроприводу на тему: Регулирование скорости движения троллейбусов, трамваев, электровозов, тепловозов Выполнил: студент 4 курса очного обучения Тухалов А.А. специальность 35.03.06 Проверил: к.т.н., доцент Логинов А.Ю. Молодёжный 2022 Содержание Устройство ТЭД 3 Применение ТЭД 4 Способы регулировки скорости ТЭД 5 Список литературы 18 1. Устройство ТЭД Тяговый электродвигатель, по сути, представляет собой электродвигатель с передачей вращающего момента на движитель транспортного средства (колесо, гусеницу или гребной винт). В конце XIX века было создано несколько моделей безредукторных ТЭД, когда якорь насаживается непосредственно на ось колёсной пары. Однако даже полное подрессоривание двигателя относительно оси не избавляло конструкцию от недостатков, приводящих к невозможности развить приемлемую мощность двигателя. Проблема была решена установкой понижающего редуктора, что дало возможность значительно увеличить мощность и развить достаточную для массового применения ТЭД на транспортных средствах силу тяги. Помимо основного режима тяговые электродвигатели могут работать в режиме генератора (при электрическом торможении, рекуперации). Существенным моментом использования ТЭД является необходимость обеспечения плавного пуска-торможения двигателя для управления скоростью транспортного средства. Вначале регулирование силы тока осуществлялось за счёт подключения дополнительных резисторов и изменения схемы коммутации силовых цепей (при наличии нескольких ТЭД — переключения их по мере разгона с последовательного соединения на последовательно-параллельное, и далее на параллельное). С целью уйти от бесполезной нагрузки и повысить КПД стали применять импульсный ток, регулировка которого не требовала резисторов. В дальнейшем стали использоваться электронные схемы, обслуживаемые микропроцессорами. Для управления данными схемами (вне зависимости от их устройства) применяются контроллеры, управляемые человеком, определяющим требуемую скорость транспортного средства. ХарактеристикиТяговый электродвигатель НБ-418К: 1 — остов; 2 — добавочный полюс; 3 — сердечник якоря; 4 — коробка якоря; 5, 11 — лобовые части якоря; 6 — коллектор; 7, 9 — подшипниковые щиты; 8 — вал; 10 — подшипник; 12 — компенсационная обмотка Как правило, определяются следующие характеристики ТЭД: Электромеханические (типовые)зависимости от тока якоря частоты вращения вращающего момента КПД Электротяговые зависимости от тока якоря окружной скорости движущих колёс ПС силы тяги КПД на ободе движущих колёс ПС Тяговые Тепловые (зависимость температур отдельных частей ТЭД от времени при различной силе тока); Аэродинамические (характеризуют обдув двигателя). 2. Применение ТЭДОсновное отличие ТЭД от обычных электродвигателей большой мощности заключается в условиях монтажа двигателей и ограниченном месте для их размещения. Это привело к специфичности их конструкций (ограниченные диаметры и длина, многогранные станины, специальные устройства для крепления, условия эксплуатации и т. п.) Локомотивы (электровозы, тепловозы с электропередачей); Электропоезда и высокоскоростной наземный транспорт (ВСНТ); Бронетехника и другие машины на гусеничном ходу; Электромобили и большегрузные автомобили с электроприводом (в том числе подъемно-транспортные машины и самоходные краны); Теплоходы с электроприводом (дизель-электроходы), атомоходы, подводные лодки; Городской электротранспорт: трамваи, троллейбусы; Беспилотные самолёты и вертолёты; Моделизм. 3. Способы регулирования скорости движенияРегулирование скорости движения электроподвижного составаРегулирование скорости достигается за счет изменения подводимого напряжения (силы) тока к ТЭД. В зависимости от вида применяемых ТЭД и устройств, включенных в цепь питания ТЭД, возможно ступенчатое и плавное регулирование напряжения тока, а, следовательно, и скорости движения локомотива. Пусковые реостаты, изменение числа последовательно соединенных двигателей, шунтирующие резисторы и трансформаторы позволяют менять напряжение ступенчато. Полупроводниковые приборы (тиристорные ключи, выпрямительные установки тиристорного типа, преобразователи частоты и числа фаз, автономные инверторы) совместно с нагрузочными и сглаживающими реакторами позволяют плавно регулировать напряжение. В системах ступенчатого регулирования скорости (напряжения) предусмотрены пусковые и ходовые позиции (ступени). Пусковые ступени используют кратковременно при трогании и наборе скорости локомотивом, а также при переходе с одной ходовой позиции (соединения ТЭД для электровозов постоянного тока) на другую во избежание больших бросков тока. В последнем случае эти ступени называют переходными. Кроме этого несколько первых пусковых позиций, когда ток Iд меньше некоторой определенной величины Iдп.min, называют маневровыми. Кратковременность использования пусковых ступеней вызвана для ЭПС переменного тока значительными потерями энергии в трансформаторах и сглаживающих реакторах, а также увеличением пульсации тока. Ходовые ступени (ступени длительного режима) применяются при ведении локомотива по участку и являются более экономичными по сравнению с пусковыми. На электровозах постоянного тока ходовыми являются безреостатные ступени и ступени ослабленного возбуждения при различных соединениях ТЭД. На электровозах переменного тока ходовыми являются ступени регулирования напряжения в трансформаторе и ступени ослабленного возбуждения для последней ходовой позиции. Набор скорости за счет переключения позиций на ЭПС переменного тока выполняется последовательным ступенчатым изменением напряжения с помощью трансформатора. При этом, как правило, одна ходовая позиция чередуется с одной или несколькими промежуточными пусковыми (переходными) позициями. После достижения максимального допустимого напряжения (максимальной ходовой позиции с нормальным возбуждением) скорость движения увеличивают ослаблением возбуждения (ступенчато выводят шунтирующий резистор). Способы регулирования скорости движения на ЭПС переменного токаСпособы регулирования скорости движения на ЭПС переменного тока. 1. За счёт изменения величины напряжения, подаваемого на двигатели. 2. За счёт ослабления возбуждения тяговых двигателей, аналогично, как и на ЭПС постоянного тока. Частота вращения якоря вычисляется по формуле:  (1.1) (1.1)где : V-частота вращения якоря U-напряжение Iн-Ток номинальный   -коэффициент ЭДС, характеризует особенности электрической машины -коэффициент ЭДС, характеризует особенности электрической машиныФ-магнитный поток На электровозах переменного тока «ЧС» величину напряжения, подаваемого на тяговые двигатели, изменяют путём переключения на первичной высоковольтной обмотке силового трансформатора. Переключения происходят при малых токах, что не требует специальных дугогасительных устройств; но при высоком напряжении, поэтому переключение происходит в масляной ванне. На отечественных электровозах и электропоездах величина напряжения подаваемого на тяговые двигатели изменяются за счёт изменения коэффициента трансформации силового трансформатора (за счёт изменения рабочих витков вторичной обмотки силового трансформатора) путём переключения выводов вторичной обмотки силового трансформатора. Переключения происходят при относительно невысоком напряжении, но больших токах, поэтому требуется применение специальных дугогасительных устройств. Вторичная обмотка силового трансформатора состоит из регулируемой части, разделённой на несколько секций, и нерегулируемой части, напряжение на которой больше напряжения регулируемой части. Применяется встречно-согласное соединение этих частей вторичной обмотки силового трансформатора, что позволяет увеличить количество позиций при меньшем количестве выводов вторичной обмотки трансформатора. Переключение выводов вторичной обмотки силового трансформатора должно происходить без разрыва электрической цепи тяговых двигателей и исключить короткие замыкания переключаемых секций вторичной обмотки силового трансформатора.[2] На электровозах для этого используется переходный реактор. В случае замыкания на секцию вторичной обмотки силового трансформатора переходный реактор выполняет роль делителя напряжения – делит напряжение замкнутой секции пополам. В таком положении переходного реактора не допускается длительная езда для исключения его перегрева. Переходный реактор алюминиевый и не имеет принудительного охлаждения. В случае подключения к одному выводу вторичной обмотки силового трансформатора переходный реактор выполняет роль делителя тока – по его двум половинам проходят равные токи, переходный реактор не оказывает индуктивного сопротивления. В таком положении переходного реактора допускается длительное езда – ходовое позиция. Более подробнее об этом будет рассмотрено при выполнении курсовой работы.[1] На электропоездах переменного тока при переключении выводов вторичной обмотки силового трансформатора используется вентильный переход. 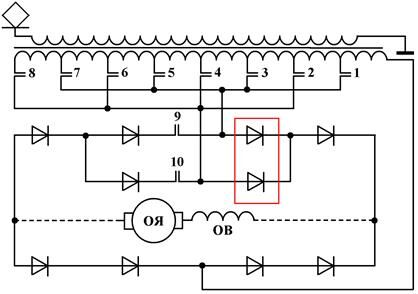 Рисунок 1- схема включения ТЭД электровоза постоянного тока. Вентили исключают короткие замыкания переключаемых секций. И при переходе с одной позиции на другую обеспечивается при этом повышение напряжения на половину напряжения одной секции. При замкнутом только контакторе 1 напряжение на двигатель только подается в один полупериод (при направлении ЭДС во вторичной обмотке трансформатора слева — направо) и от первой секции. 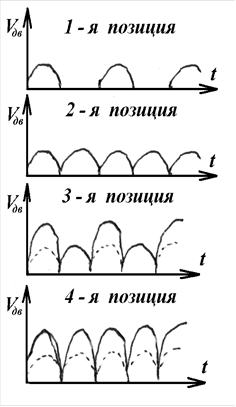 Рисунок 2- График скачкообразности напряжения На следующей позиции замыкается контактор 9 и на двигатель будет подаваться напряжение в оба полупериода от первой секции. Затем дополнительно замыкается контактор 2. При направлении ЭДС во вторичной обмотке силового трансформатора слева – направо напряжение на тяговые двигатели подаётся от двух секций. В другой полупериод – только от первой секции. В целом за период напряжения возросло на 0,5 напряжения второй секции. При переходе на четвёртую позицию замыкается контактор 10, размыкается контактор 9. В оба полупериода напряжение на тяговые двигатели подаётся от двух секций вторичной обмотки трансформатора. И так далее. В рассмотренных случаях подаваемое напряжения на тяговые двигатели изменяется скачкообразно, значит скачкообразно изменяется величина тока и сила тяги. От величины скачкообразного изменения величины напряжения зависит плавность движения поезда. [1]. В качестве выпрямителей на электровозах стали использоваться тиристоры. Тиристор – это управляемый вентиль. Вентиль – значит пропускает ток только в одном направлении. Управляемый – начинает пропускать ток только в случае подачи сигнала на управляющей электрод тиристора. С применением тиристоров можно выполнить плавное изменение подачи напряжения подаваемого, на тяговые двигатели, а, значений, и будет плавное изменение величины тока, силы тяги и не будет толчков при движении поезда.  Рисунок 3-График скачкообразности напряжения с тиристором Импульс подачи напряжения на открытие тиристора 0,001сек, V = 5 ÷ 10В. Изменяя угол открытия тиристора (или время задержки открытия тиристора tз) и меняется величина подаваемого напряжения на тяговые двигатели. Регулирование скорости движения на ЭПС[3].Из предыдущего следует, что каждому значению силы тяги соответствует одна (и только одна) скорость движения поезда определенной массы на конкретном элементе профиля пути. Поэтому наличие одной тяговой характеристики не позволяет выбрать необходимую по условиям движения скорость. Необходимость же иметь такой выбор очевидна. Она вытекает из того, что профиль пути постоянно изменяется, изменяется и сопротивление движению, а движение поезда необходимо обеспечить с установленной скоростью, предусмотренной графиком. Поезда, следующие по участку, имеют различную массу, а следовательно, и значения сопротивления движению у них разные. При этом каждый поезд необходимо вести с определенной скоростью. При наличии одной тяговой характеристики, соответствующей номинальному напряжению UД.Н, невозможно произвести пуск электровоза. Это следует: тяговая характеристика 1 не пересекает оси ординат, то есть сила тяги при V = 0 бесконечно велика и не может быть реализована. Задача управления ЭПС сводится, таким образом, к выбору необходимого режима движения и осуществлению пуска ЭПС. Следовательно, необходимо иметь несколько тяговых характеристик. Получение «семейства» их, в принципе, возможно путем изменения величин, входящих в уравнения и, а следовательно, влияющих на расположение тяговой характеристики в системе координат FK—v. При этом следует иметь в виду, что величину тока произвольно изменять нельзя, так как его значение однозначно определяется противоЭДС, приложенный напряжением и сопротивлением обмоток двигателя. В формулы, определяющие значения силы тяги и скорости движения при определенном токе» входит ряд величин, часть из которых изменить в процессе движения невозможно. К ним относятся: постоянные КМБ CVи CF сопротивление обмоток ТД rД и КПД ηМи ηЗ.П . Для получения нескольких тяговых; характеристик могут быть использованы при возможности: 1) изменение напряжения, подведённого к ТД, — UД; 2) включение последовательно в цепь ТД добавочного резистора R; 3) изменение величины магнитного потока Ф при неизменном токе якоря. Все указанные возможности нашли практическое использование на ЭПС постоянного и переменного тока. Регулирование скорости движения .изменением напряжения, подведенного к ТД Допустим, что скоростная характеристика ТД при номинальном напряжении UД.Н имеет вид, представленный на рис. 4, а кривой 1. При некотором значении тока IД1 скорость движения При другой величине напряжения и том же токе При одинаковых токах магнитные потоки будут равны, следовательно, Или пренебрегая незначительной величиной потери напряжения IЯrД по отношению к UД, получим 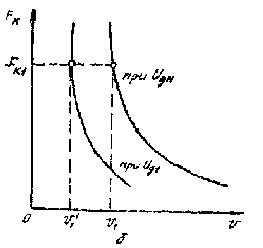 Рисунок 4- График зависимости скорости от напряжения  Рисунок 5 -График зависимости скорости от силы тока Выполняя аналогичные расчеты для других значений тока, получим «семейство» точек, а соединив их плавной кривой— скоростную характеристику при новом значении напряжения UД1 Регулирование скорости движения изменением сопротивления резистора включенного последовательно в цепь Т Д. Если в цепь ТД последовательно включен резистор с сопротивлением R, то скорость движения при некотором токе I1 номинальном напряжении UД.Н а при R=0 Следовательно, чем больше значение R,тем меньше скорость движения при данном токе и напряжении по отношению к скорости при R=0. На рис. 5 кривой 2 показана зависимость vR(I) при наличии резистора R в его цепи, а кривой 1—при R =0. Заметим, что разница в скоростях V и vrпо мере увеличения тока возрастает, тогда как при первом способе соотношение скоростей оставалось практически постоянным при разных значениях тока [2]. Сила тяги от величины сопротивления не зависит, следовательно, она будет равна FK1 как при R = 0, так и при некотором значении R Таким образом, одно и то же значение FK1 будет реализовано при скоростях v1 (R = 0) и v1R 2 R, поэтому рассматриваемый способ является неэкономичным. Количество тяговых характеристик, полученных этим способом, будет зависеть от числа значений сопротивления, которое технически возможно осуществить при каждом уровне напряжения, предусмотренном на том или ином типе ЭПС. Регулирование скорости, движения изменением- магнитного потока ТД При. последовательном возбуждении изменить величину магнитного потока .при некотором значении тока якоря Iя возможно только путем уменьшения тока Iв по отношению к Iя. Это обычно осуществляют подключением параллельно обмотке возбуждения резистора, то есть ее шунтированием (shun — англ. — избегать, обходить). По закону Кирхгофа для точки А (рис.5). Коэффициент регулирования возбуждения определяется соотношением сопротивления обмотки возбуждения ТД и шунтирующего резистора. При некотором токе Iя, номинальном напряжении UД.Н и полном возбуждении (ПВ) При ослабленном возбуждении и тех же условиях скорость движения будет больше: а сила тяги — меньше: На основании соотношение скоростей при одинаковом токе примерно одинаково с соотношением напряжений, то есть[2]. Иным будет соотношение скоростей у четырехосного и восьмиосного электровозов. Соответствующие схемы рекомендуется составить самостоятельно и определить уровни напряжения. Таким образом, в зависимости от количества ТД на электровозе (или моторном вагоне), с помощью изменения схемы соединения ТД можно получить определенное количество уровней напряжения и соответствующее число тяговых характеристик. Схема соединения ТД, называемая силовой схемой (или схемой силовой цепи), должна’ обеспечивать возможность Соединения ТД в различных комбинациях. Это осуществляется контакторными элементами специального аппарата — группового переключателя. Способы регулировки скорости движения у электровоза переменного токаРегулирование скорости на локомотивах регулирование скорости осуществляется с помощью контроллера машиниста. Контроллер машиниста — электрический аппарат, служащий на электроподвижном составе для управления работой ТЭД в тяговом и тормозном режимах, на тепловозах — для изменения реализуемой мощности дизеля. Регулирование скорости электроподвижного состава достигается за счет изменения подводимого напряжения (силы) тока к ТЭД. В зависимости от вида применяемых ТЭД и устройств, включенных в цепь питания ТЭД, возможно ступенчатое и плавное регулирование напряжения тока, а, следовательно, и скорости движения локомотива. Пусковые реостаты, изменение числа последовательно соединенных двигателей, шунтирующие резисторы и трансформаторы позволяют менять напряжение ступенчато. Полупроводниковые приборы (тиристорные ключи, выпрямительные установки тиристорного типа, преобразователи частоты и числа фаз, автономные инверторы) совместно с нагрузочными и сглаживающими реакторами позволяют плавно регулировать напряжение [1]. В системах ступенчатого регулирования скорости (напряжения) предусмотрены пусковые и ходовые позиции (ступени). Пусковые ступени используют кратковременно при трогании и наборе скорости локомотивом, а также при переходе с одной ходовой позиции (соединения ТЭД для электровозов постоянного тока) на другую во избежание больших бросков тока. В последнем случае эти ступени называют переходными. Кроме этого несколько первых пусковых позиций, когда ток Iд меньше некоторой определенной величины Iдп.min, называют маневровыми. Кратковременность использования пусковых ступеней вызвана: — для ЭПС постоянного тока значительными потерями энергии в пусковом реостате (электрическая энергия преобразуется в тепловую и рассеивается); — для ЭПС переменного тока значительными потерями энергии в трансформаторах и сглаживающих реакторах, а также увеличением пульсации тока. Ходовые ступени (ступени длительного режима) применяются при ведении локомотива по участку и являются более экономичными по сравнению с пусковыми. На электровозах постоянного тока ходовыми являются безреостатные ступени и ступени ослабленного возбуждения при различных соединениях ТЭД. На электровозах переменного тока ходовыми являются ступени регулирования напряжения в трансформаторе и ступени ослабленного возбуждения для последней ходовой позиции. В общем случае, набор скорости за счет переключения позиций на ЭПС постоянного тока выглядит следующим образом: — включают последовательное соединение ТЭД: o трогание с места начинают с полностью включенным пусковым реостатом — используется первая маневровая позиция; o ступенчато выводят (выключают) реостат до достижения величины тока двигателя Iдп.min — используются следующие маневровые позиции; o продолжают ступенчато выводить реостат до полного его отключения — используются пусковые позиции; o используют первую ходовую позицию при полном возбуждении полюсов статора o ступенчато выводят шунтирующий резистор для ослабления возбуждения полюсов статора — используется следующие ходовые позиции при различных ступенях возбуждении полюсов статора — выполняют переход на последовательно-параллельное соединение ТЭД: o включают пусковой реостат и ступенчато его выводят до полного отключения — используются переходные пусковые позиции; o используют ходовую позицию при полном возбуждении полюсов статора o ступенчато выводят шунтирующий резистор для ослабления возбуждения полюсов статора — используется следующие ходовые позиции при различных ступенях возбуждении полюсов статора — выполняют переход на параллельное соединение ТЭД: o включают пусковой реостат и ступенчато его выводят до полного отключения — используются переходные пусковые позиции; o используют ходовую позицию при полном возбуждении полюсов статора П-ПП; o ступенчато выводят шунтирующий резистор для ослабления возбуждения полюсов статора — используется следующие ходовые позиции при различных ступенях возбуждении полюсов статора. Набор скорости за счет переключения позиций на ЭПС переменного тока выполняется последовательным ступенчатым изменением напряжения с помощью трансформатора. При этом, как правило, одна ходовая позиция чередуется с одной или несколькими промежуточными пусковыми (переходными) позициями. После достижения максимального допустимого напряжения (максимальной ходовой позиции с нормальным возбуждением) скорость движения увеличивают ослаблением возбуждения (ступенчато выводят шунтирующий резистор). Регулирование скорости тепловозов и дизель-поездов достигается за счет изменения числа оборотов коленчатого вала (мощности) дизеля. Для этого машинист переводит рукоятку контроллера с одной позиции на другую. Количество позиций на отечественных тепловозах колеблется от 8 до 16. При этом ступенчато увеличивается (уменьшается) подача топлива в цилиндры дизеля до тех пор, пока число оборотов вала дизеля не возрастет до заданной величины (соответствующей положению рукоятки контроллера) [1]. Дальнейшее регулирование скорости и силы тяги в пределах одной позиции с целью наиболее рационального использования мощности дизеля осуществляется за счет автоматического переключения: — в механической передаче — пар зубчатых колес (шестерен) с различным количеством зубьев в коробке передач. Например, для дизель-поезда Д1 — I, II и III ступени; — в гидравлической передаче — гидроаппаратов. Например, для тепловоза ТГМ3А — 1 гидротрансформатор, 2 гидротрансформатор и гидромуфта; — в электрической передаче — схемы подключения ТЭД с последовательного (сериесного — С) на последовательно-параллельное (СП) и с последовательно-параллельного (СП) на параллельное (ПП) или при одной схеме подключения ТЭД за счет ступеней ослабления магнитного поля ТЭД (ОП). Например, для тепловоза ТЭ1 — С, СП и СП-ОП1, для ТЭ7 — СП, СП-ОП1 и СП-ОП2, для ТЭ10 — ПП, ПП-ОП1 и ПП-ОП2. Таким образом, при одной и той же позиции контроллера машиниста образуется несколько ступеней скорости (на тяговой характеристике зависимостей Fк(V)). Прямые и обратные переходы с одной ступени на другую отличаются на несколько километров в час с «нахлестом» (в среднем на 10-20 км/ч). Этим предотвращаются частые повторные переключения в зоне переходов: — в механической передаче — зубчатых колес в коробке передач; — в гидродинамической передаче — гидроаппаратов; — в электрической передаче — схем подключения ТЭД и переключения степеней ослабления магнитного потока (тока возбуждения) ТЭД. На тепловозах с электрической передачей на базе асинхронных ТЭД (например, ТЭ120, 2ТЭ25А) возможно плавное изменение скорости (точнее, подводимого к ТЭД напряжения) в пределах зон регулирования напряжения и ступенчатое ослабление возбуждения для последней зоны такое же, как и для аналогичных электровозов. 15 Комплексное локомотивное устройство безопасности (КЛУБ) устанавливается на тяговом и самоходном железнодорожном подвижном составе (локомотивы, МВПС, дрезины) и функционально сочетает в себе автоматическую локомотивную сигнализацию и электронный локомотивный скоростемер. Список литературы Троллейбусы (теория, конструкция и расчет) Ефремов И.С. - 1969 год Москаленко В.В. Автоматизированный электропривод Бабакин В.И. Лекции. Автоматизированный электропривод типовых производственных механизмов и технологических комплексов |
