РГР по ТММ. Задача Структурный анализ и кинематика рычажных механизмов
 Скачать 2.21 Mb. Скачать 2.21 Mb.
|

|
Кинематическое и силовое исследование рычажного механизма. Расчетно-графическая работа состоит из двух задач и охватывают две основные разделы дисциплины: первая задача «Структурный анализ и кинематика рычажных механизмов», вторая задача «Динамика рычажных механизмов». Все графические построения строятся в масштабе на миллиметровке. Под масштабом в ТММ понимается как отношение действительного значения физической величины в свойственных ей единицах измерения (система СИ) к отрезку (в мм), изображающему её на чертеже. Такое понятие позволяет изображать в виде отрезков на чертеже любые параметры (линейные размеры, скорости, ускорения, силы и др.). Задача структурного анализа заключается в определении числа и вида подвижных звеньев, числа и вида кинематических пар, в разбивке механизма на группы Асура. Задачами кинематического анализа являются: 1. Построение плана положений механизма. 2. Определение положений звеньев и траекторий движения точек этих звеньев. 3. Определение угловых скоростей звеньев и линейных скоростей их точек. 4. Определение угловых ускорений звеньев и линейных ускорений их точек. Исходные данные для обеих задач приведены в таблицах 1 и 2, схемы рычажных механизмов в приложении 1.Варианты схем механизмов выбираются из приложения 1 по последней цифре шифра студента, а вариант числовых данных по последней цифре шифра из таблиц 1 и 2. 1.Решение задачи начинают с определения числа степеней подвижности механизма по формуле Чебышева для плоских механизмов: W = 3п'-2 p5- p4, гдеn'- число подвижных звеньев; p5 - количество кинематических пар V класса; p4-количество кинематических пар IV класса 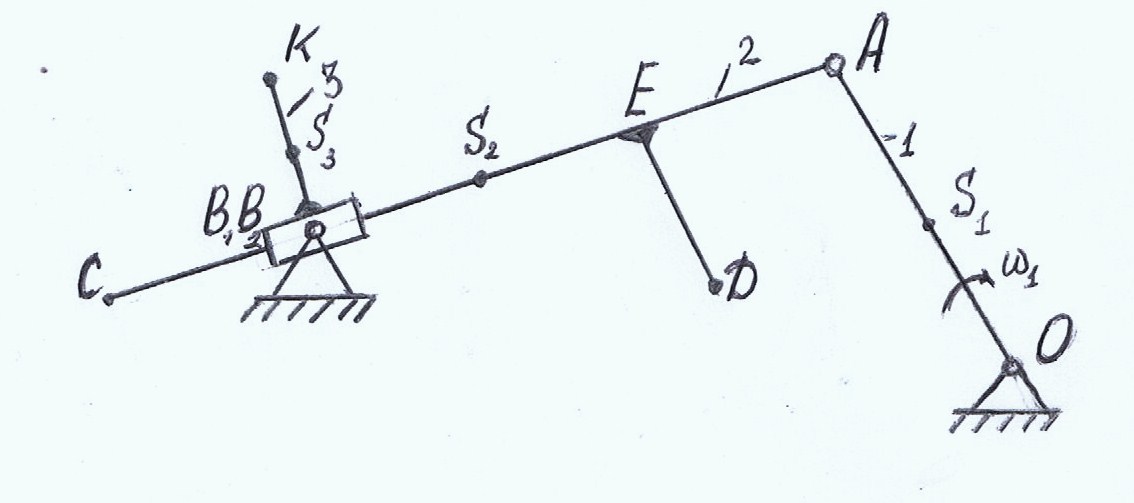 Рисунок 1- Кинематическая схема кривошипно-кулисного механизма 2. Затем нужно определить вид структурной группы (Ассура), присоединенной к начальному звену механизма, так как для каждого вида разработана своя методика кинематического и силового расчета. 2. План положений механизма. Планом положений механизма называют чертеж, построенный в масштабе 3. Планом скоростей (ускорений) механизма называют чертеж, построенный в масштабе Рассмотрим построение плана скоростей. 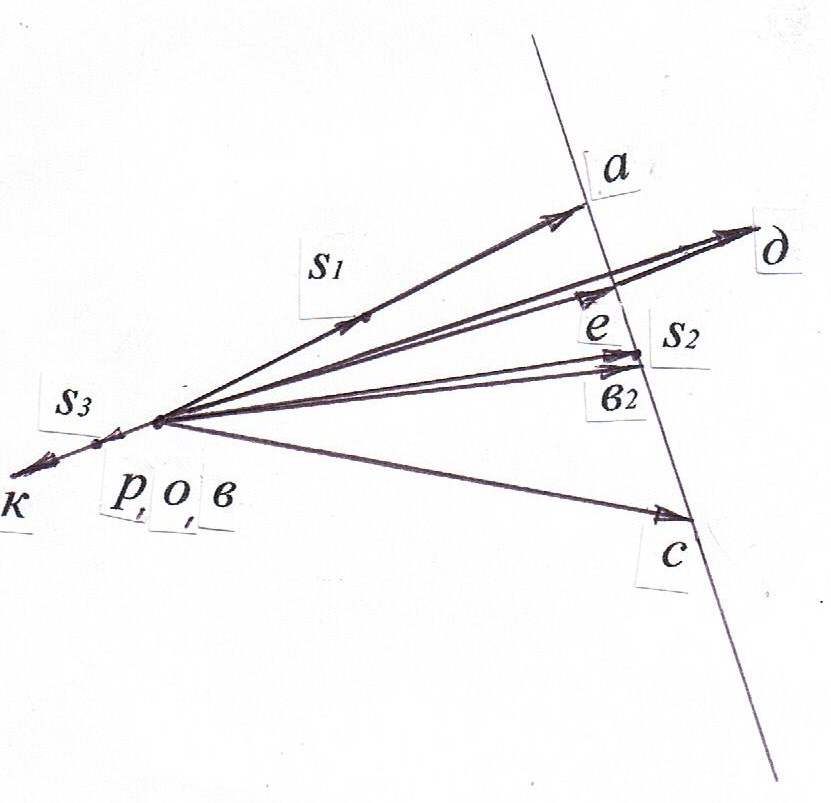 Рисунок 2- План скоростей 1) Рассмотрим построение плана скоростей для механизма представленного на рисунке 2. Кроме всех линейных размеров по условию задачи должна быть задана угловая скорость ведущего звена ω1 =const. Если задается частота вращения [n, об/мин], то ω1 = VA = ω1∙lOA. При этом Построение плана скоростей ведется в такой последовательности: по векторным уравнениям (1) и (2) от полюса р откладывается отрезок ра, изображающий в масштабе скорость точки А (ра = (принадлежит стойке), т.е. точку в смещаем с точкой р. После этого из точки в проводим прямую до пересечения с перпендикулярной прямой к звену АВ и получаем искомую точку в2. Изобразим векторный отрезок соединяющий точку полюса р с в2. Вектор рв2 является вектором абсолютной скорости точки В2. Скорость точки С определим из подобия, т.к. точки А ,В и С принадлежат одному и тому же звену: Точку с откладываем на плане скоростей в продолжении звена АВ от точки в2. соединим точку полюса р с точкой с векторно и вычислим значение абсолютной скорости т.С : Скорость т. Е определяется аналогично из подобия, т.к. принадлежит одному и тому же звену: Отложим отрезок ае в мм. Соединим векторно точку полюса р с точкой е и вычислим абсолютную скорость точки:  , где , где Скорость точки Д определим через скорость т.Е. Для этого составим векторное уравнение: Далее определим положения центров масс S на плане скоростей и соединив векторно вычислим их абсолютные значения скоростей с точкой полюса 2) Построение плана ускорений ведется в такой же последовательности. Для определения ускорения точки В2 запишем два векторных уравнения:   , ,  Касательное ускорение: 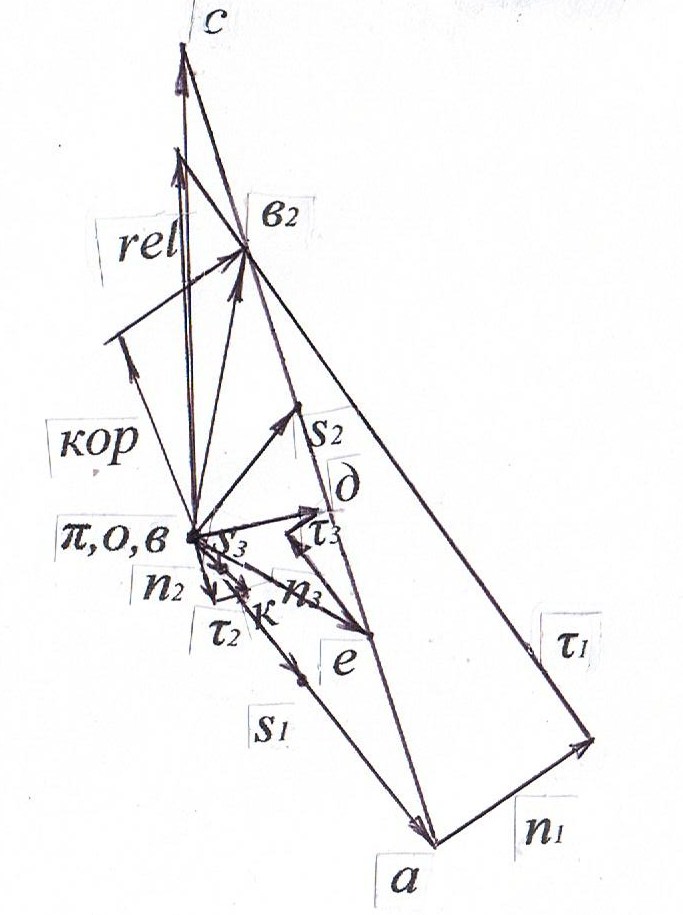 Рисунок 3 План ускорений механизма Ускорение Кориолиса по модулю равно: для определения его направления необходимо вектор скорости   Релятивистское ускорение направлено вдоль направляющей ползуна, т.е.параллельно звену АВ: Точка пересечения с тангенсальным и релятивистским ускорениями будет являться ускорением точки В2. Соединим векторно точку полюса π с точкой в 2 и вычислим абсолютное ускорение точки. Для определения ускорений точек С и Е применим подобие (см. план скоростей) Определим ускорение точки К: Так как все слагаемые известны по направлениям и значениям ( Определим ускорение точки Д: Соединим точку полюса π с точкой д .Определим абсолютное ускорение точки Д: Далее определим положения центров масс (S) из подобия, соединив векторно с точкой полюса, вычислим их абсолютные ускорения.  2. При выполнении силового расчета по методу Н.Е. Бруевича используют принцип кинетостатики: если ко всем внешним действующим на звенья механизма силам добавить силы инерции и моменты сил инерций, то механизм будет находиться в состоянии статического равновесия. Силовой расчет проводится по группам Ассура, начиная с наиболее отдалённой структурной группы (в случае, если их несколько) от начального механизма. Заканчивается решение расчетом кривошипа, входящего начальный механизм, для которого определяют уравновешивающий момент. Некоторые свойства планов скоростей и ускорений.
3) Силовой расчет методом планов рассмотрим на примере механизма, рассмотренного в предыдущей задаче. Силу инерции звеньев ( Для того чтобы механизм находился в равновесии под воздействием всех сил к ведущему звену должен быть приложен уравновешивающий момент или уравновешивающая сила. Силовой расчет следует начинать с группы Ассура, присоединенной к механизму при его образовании в последнюю очередь. В данном примере от механизма может быть отделена только одна группа. Это структурная группа II класса 3 вида. Группу Ассура начертим отдельно в масштабе (рисунок 4).  Рисунок 4 Силовой расчет для группы Ассура 2 класса 3 вида. При этом в кинематических парах А и В прикладываем реакции R12 и R43, которые неизвестны ни по величине, ни по направлению. Одну из реакций (например, R12) разложим на две составляющих:
 Рисунок 5 План сил
 При решении уравнения (1) плечи h измеряем на чертеже в мм и умножаем на коэффициент масштабности μl . При построении плана сил по уравнению (2) вначале проводим направление неизвестной по величине реакции В заключение проводим силовой расчет ведущего звена 1:
 Рисунок 6 Кинетостатика ведущего звена 2)  Рисунок 7 План сил Вариант схемы механизмов выбирается по предпоследней цифре шифра студента, а вариант числовых данных – по последней цифре шифра. ЗАДАЧИ 1 И 2 Варианты схем механизмов выбираются из рисунков 1, 2, 3, а числовые данные и соотношения звеньев – из таблиц 1 и 2 Таблица 1
Таблица 2
Примечание – центр масс звена ОА во всех вариантах OS1= 0,5∙ОА ПРИЛОЖЕНИЕ 1 (обязательное) 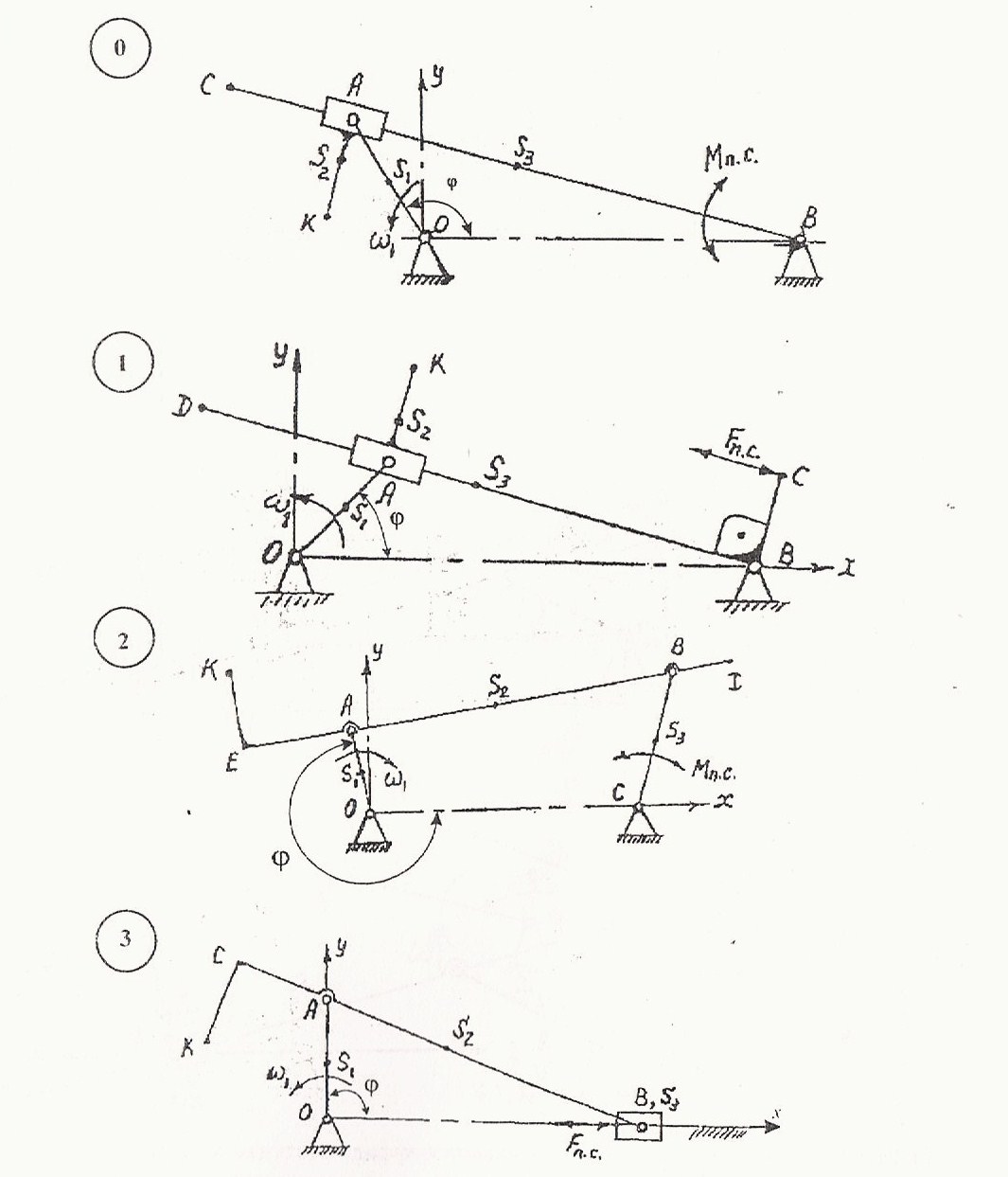 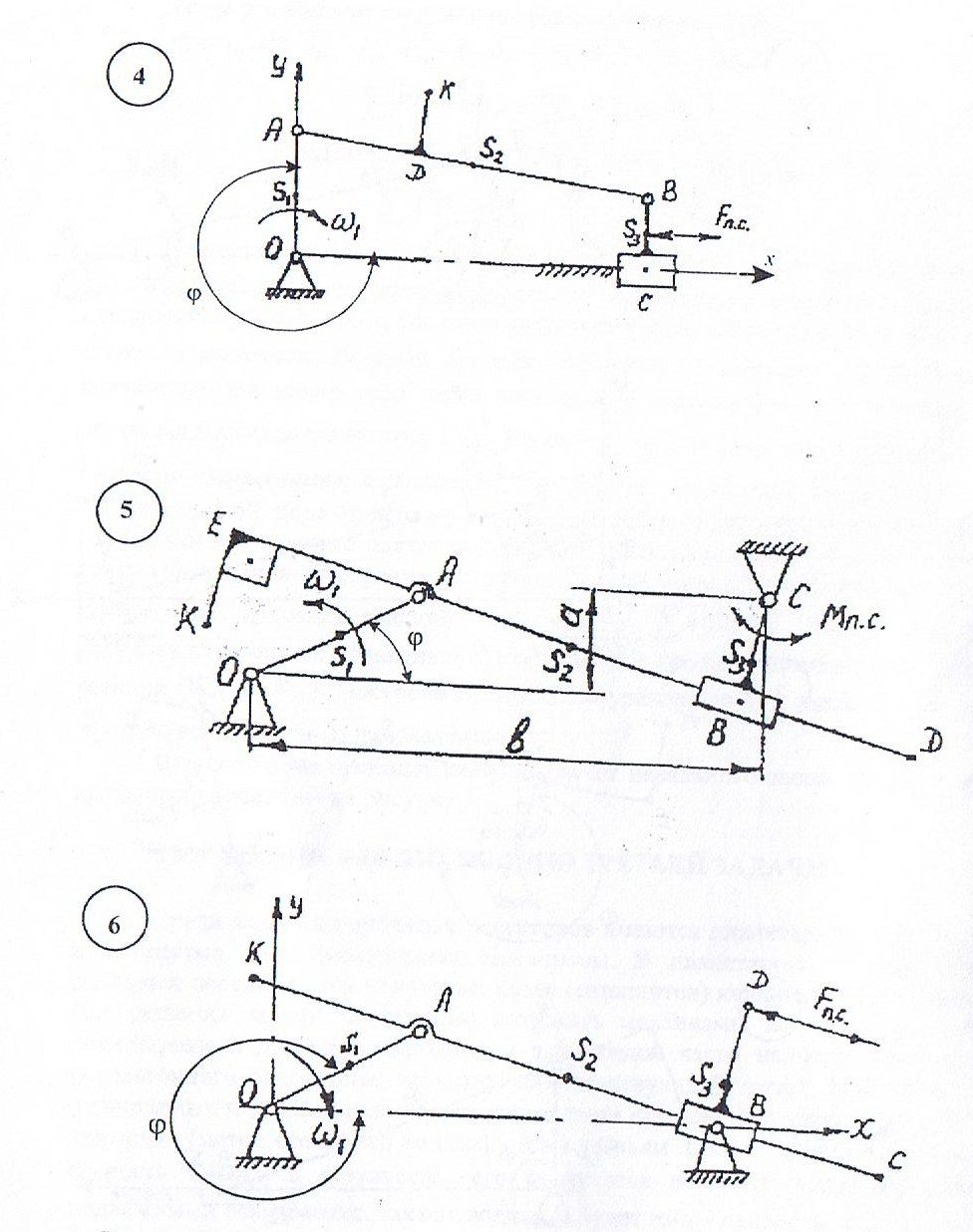 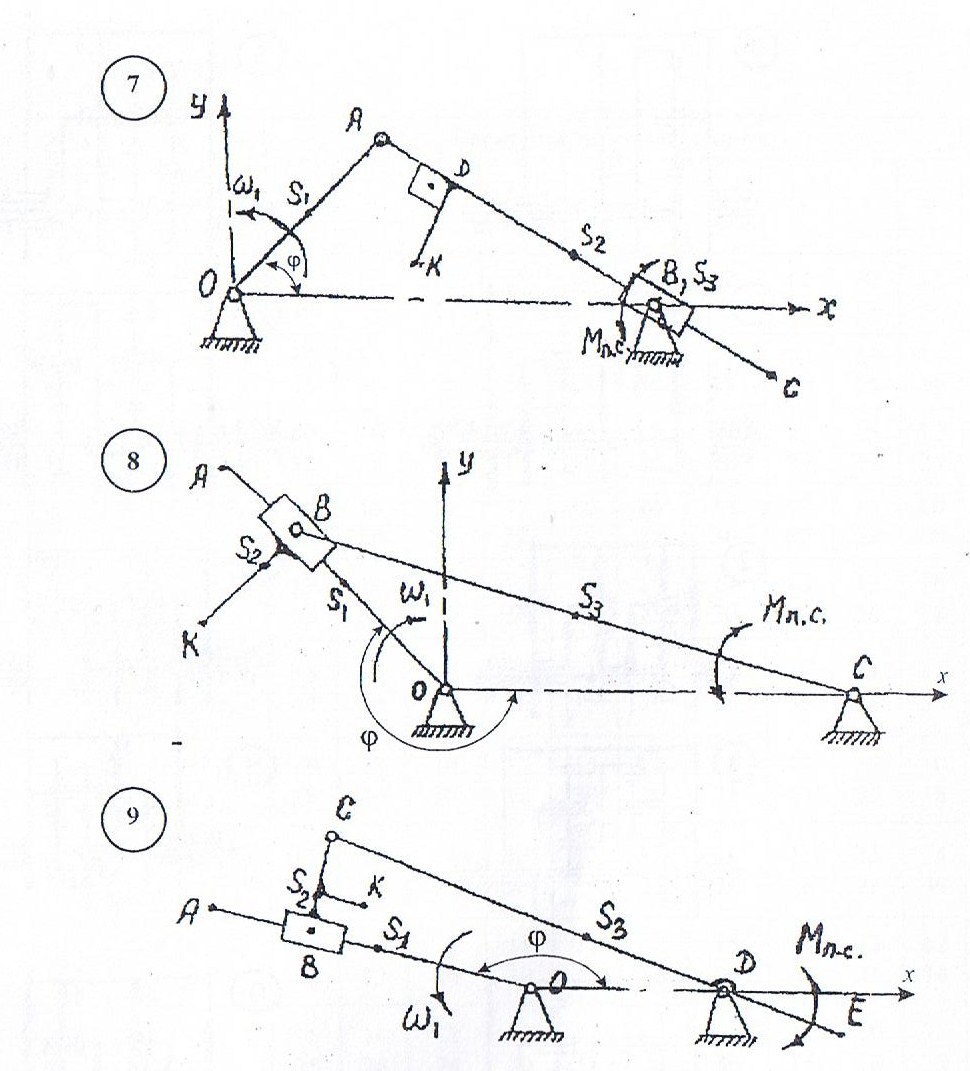 ПРИЛОЖЕНИЕ 2 (обязательное) 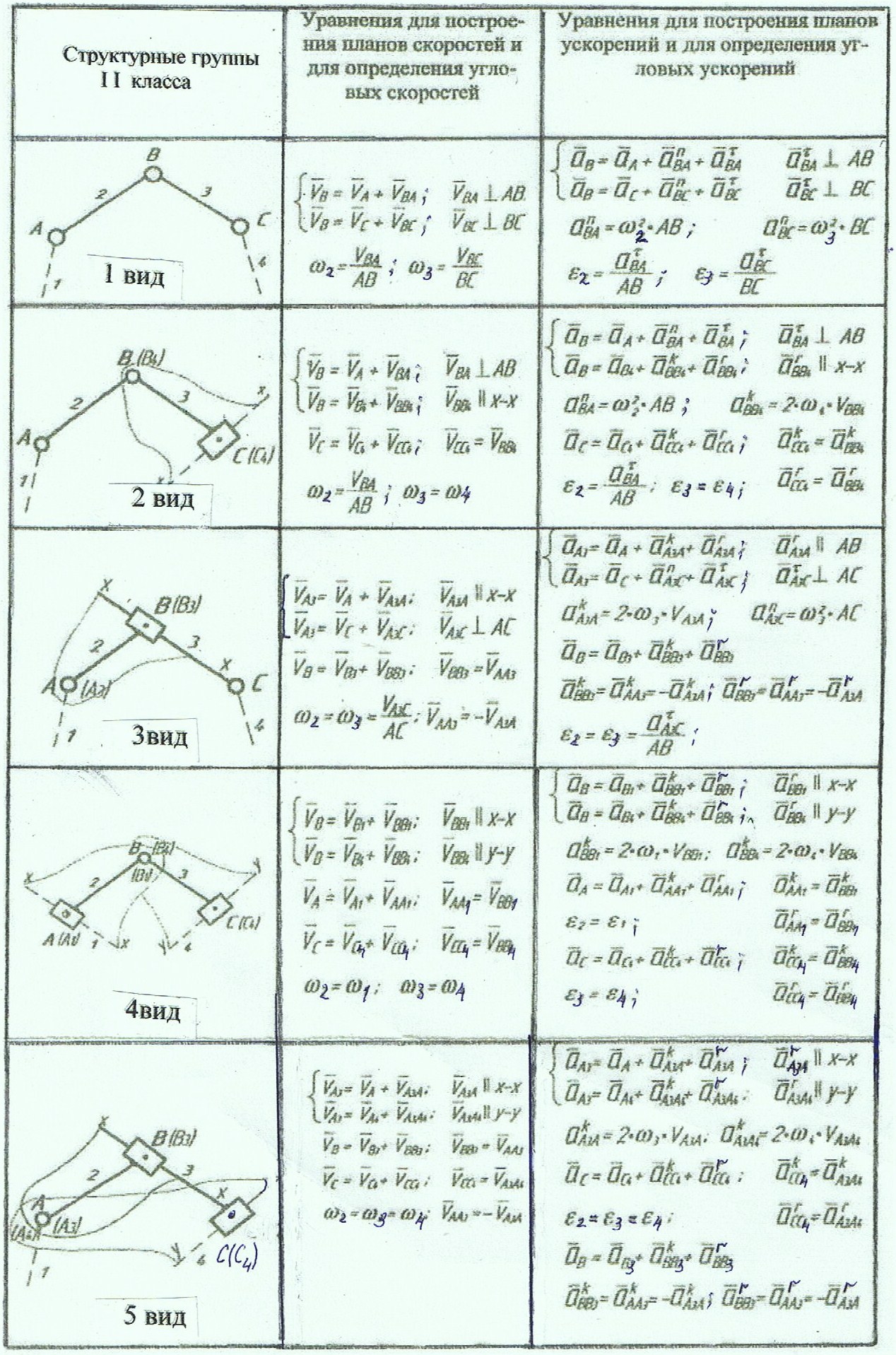 ПРИЛОЖЕНИЕ 3 (обязательное) 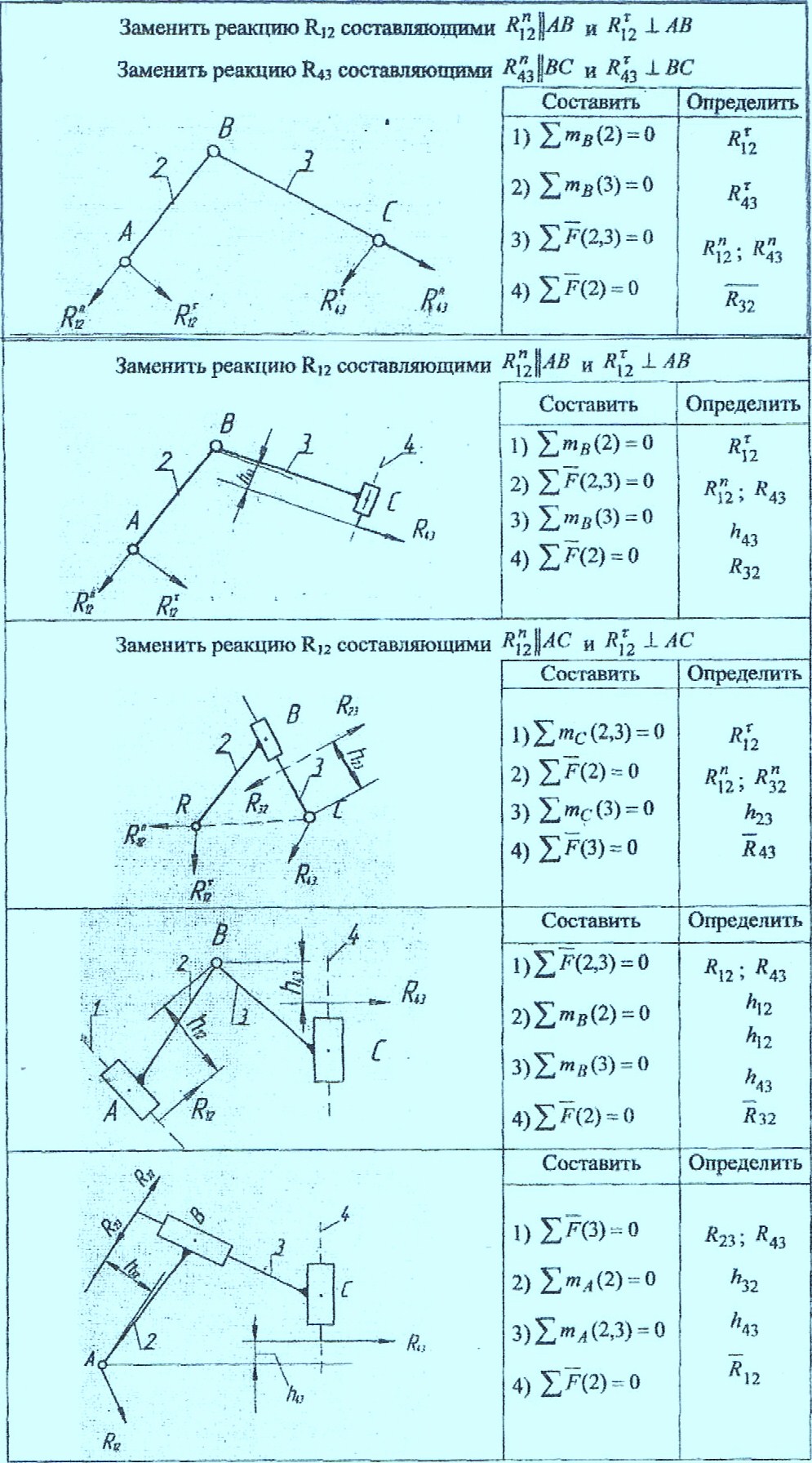 Рекомендуемая литература:
1989. – 366 с.
| ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||