|
|
1. Беспилотные мультироторные летательные аппараты
Введение
На сегодняшний день беспилотные летательные аппараты (БПЛА) - бурно развивающаяся область техники. БПЛА выполняют широкий спектр как военных, так и гражданских задач. В последние годы большую популярность приобрели мультироторные БПЛА (мультикоптеры) по причине доступности и простоты эксплуатации. Мультикоптеры используются для доставки грузов, фото- и видеосъемки, поисковых работ, наблюдения за природными явленими и многого другого.
Разработки в этой области активно ведутся как коммерческими предприятиями, так и любителями. В данной работе описан проект, цель которого - автоматизировать систему управления мультикоптера с четырьмя роторами, сделать управление интуитивно понятным и отзывчивым. В результате было разработано устройство, способное передавать «с Земли» всю информацию, необходимую для пилотирования мультикоптера, используя лишь жесты одной руки. Разработка устройства от проектирования и до готового кода велась самостоятельно и в ней, кроме всего прочего, были использованы источники с открытым исходным кодом - платформа Arduino ибиблиотека компьютерного зрения OpenCV.Устройство является прототипом, но имеет перспективы к развитию и реальному использованию.
1. Беспилотные мультироторные летательные аппараты
Квадрокоптер (разновидность мультикоптера) - это летательный аппарат построенный по вертолётной схеме с четырьмянесущими винтами.
Многовинтовые вертолёты разрабатывались ещё в первые годы вертолётостроения. Один из первых квадрокоптеров, который реально оторвался от земли и мог держаться в воздухе, был создан Георгием Ботезатом и испытан в 1922 году. Недостатком этих аппаратов была сложная трансмиссия, передававшая вращение одного мотора на несколько винтов. Изобретение хвостового винта и автомата перекоса положило конец этим попыткам. Новые разработки начались в 1950-е годы, но дальше прототипов дело не продвинулось. беспилотный квадрокоптер контроллер
Новое рождение мультикоптеры получили в XXI веке, уже как беспилотные аппараты. Благодаря простоте конструкции квадрокоптеры часто используются в любительском моделировании. Мультикоптеры удобны для недорогой аэрофото- и киносъёмки - громоздкая камера вынесена из зоны действия винтов.
Квадрокоптеры имеют четыревинта постоянного шага (автомата перекоса, в отличие от одно- и двухвинтовых аппаратов, нет). Каждый винт приводится в движение собственным двигателем. Половина винтов вращается по часовой стрелке, половина - против, поэтому хвостовой винт квадрокоптеру не нужен. Маневрируют квадрокоптеры путём изменения скорости вращения винтов. Например:
ускорить все винты - подъём;
ускорить винты с одной стороны и замедлить с другой - движение в сторону;
ускорить винты, вращающиеся по часовой стрелке, и замедлить вращающиеся против - поворот.
Микропроцессорная система переводит команды радиоуправления в команды двигателям. Чтобы обеспечить стабильное зависание, мультикоптеры в обязательном порядке снабжают тремя гироскопами, фиксирующими крен аппарата. Как вспомогательный инструмент, иногда, также используется акселерометр, данные от которого позволяют процессору устанавливать абсолютно горизонтальное положение, и бародатчик, который позволяет фиксировать аппарат на нужной высоте. Также, применяют сонар для автоматической посадки и удержания небольшой высоты, а также для облёта препятствий.
Современные мультикоптеры используют бесколлекторные электродвигатели и литий-полимерные аккумуляторы в качестве источника энергии. Это накладывает определённые ограничения на их полётные характеристики: типичная масса мультикоптера составляет от 1 до 4 кг, при времени полёта от 10 до 30 минут (30-50 минут у уникальных единичных экземпляров). Поднимаемый полезный груз моделями мультикоптеров среднего размера и грузоподъёмности - от 500 г до 2-3 кг, что позволяет поднять в воздух небольшую фото или видеокамеру. Существуют и достаточно крупные модели мультикоптеров, с количеством роторов порядка 6-8 (гекса и октокоптеры), способные поднять в воздух груз массой до 20-30 кг. Для увеличения грузоподъёмности применяют соосное расположение несущих роторов, что в случае гексакоптера, например, даёт 12 моторов и 12 пропеллеров, расположенных попарно на 6 несущих лучах. Скорость полёта мультикоптера может быть от нуля (неподвижное висение в точке) до 100-110 км/ч. Запас энергии батарей позволяет отдельным моделям мультикоптеров улетать на расстояние до 7-12 км, на практике же радиус действия (максимальное расстояние, на которое они способны улететь с последующим возвратом в точку взлёта) обычно ограничено прямой видимостью (100-200 м при ручном управлении) либо дальностью действия аппаратуры радиоуправления и видеолинка. При этом лучшие образцы подобной аппаратуры, использующие усилители мощности радиосигнала и систему направленных антенн, способны обеспечивать стабильные радиоуправление и видеолинк на расстояния до 100 км. Таким образом, наибольшее ограничение на радиус действия мультикоптеров накладывает именно время полёта.
1.1 Базовые принципы полета квадрокоптера
Квадрокоптер состоит из нескольких принципиальных элементов, без большинства из которых стабилизированный полет невозможен. Во-первых, это полетный контроллер, который обрабатывает всю поступающую информацию и преобразует в сигналы для двигателей. Контроллер принимает входящую информацию чаще всего как цифровой сигнал с широтно-импульсной модуляцией. Для полной ориентации в воздухе достаточно четырех каналов: газ, рыскание, тангаж и крен. В некоторых моделях полетных контроллеров также предусмотрена возможность использования режимов полета - тогда во входном сигнале появляются дополнительные каналы. Также к входам контроллера подключены датчики, описывающие положение борта в воздухе. Исходя из этих данных, контроллер автоматически вносит корректировки в выходной сигнал.
После сигнал обрабатывается таким образом, чтобы на выходе получить соответствующие величины напряжений, пропорциональных скорости каждого из четырех винтов. С выхода контроллера сигнал, так же широтно-импульсно промодулированный, поступает на так называемый ПИД-регулятор, который управляет сигналом большой мощности, подавая его непосредственно на сам двигатель.
Рис.1. Принципиальная схема квадрокоптера
Базовые принципы полетов любой техники описывает аэродинамика и квадрокоптеры не являются исключением. Три оси вращения абсолютно однозначно задают ориентацию квадрокоптера в пространстве и направление его полета. Причем направление движения никак не зависит от расположения самого квадрокоптера в воздухе.
Три перечисленных выше оси или угла принято правильно называть тангажом (pitch), креном (roll) и рысканьем (yaw). Разберем их более подробно.
Рис.2. Углы Эйлера - крен, тангаж и рыскание
Под тангажом понимают поворот аппарата вокруг продольной оси, рысканием - вокруг вертикальной оси, а креном - продольной оси.
Если брать в рассмотрение вертолет, то его главный винт имеет влияние на тангаж и крен, а хвостовой компенсирует вращающий момент и от того, с какой скоростью он вращается и в каком положении находится, зависит рыскание.
В случае квадрокоптера все обстоит иначе. Здесь имеются целых четыре винта, два из которых вращаются по часовой стрелке, а два других в противоположном направлении. Соответственно если все из винтов квадрокоптера имеют одинаковую скорость вращения, то все параметры будут скомпенсированы. При увеличении скорости вращения одного из винтов квадрокоптера баланс нарушается. При этом, если скорость винта с обратным направлением вращения будет пропорционально уменьшена, то рыскание не поменяется, но изменится тангаж или крен[1].
Если же увеличивать обороты одновременно на обоих винтах, которые вращаются в одном направлении и уменьшить на других, то угол рыскания будет изменен.
Управление двигателями квадрокоптера, а, следовательно, и скоростью вращения его винтов, осуществляется с пульта дистанционного управления, сигнал с которых поступает на бортовой компьютер квадрокоптера и к ним добавляются необходимые коррекции от гироскопа, акселерометра и так далее.
При проектировании и создании квадрокоптера следует выполнить все необходимые расчеты с целью нахождения оптимального баланса между массой аппарата, мощностью установленных на него двигателей и целого ряда других факторов.
Теории ℒ1 адаптивного управления
ℒ1 Адаптивное управление – это совокупность методов теории управления, позволяющих синтезировать системы управления, которые имеют отделять оценку (адаптация) от контроля (робастность), и с этим позволяет произвольным быстрой адаптации [5], [6]. Основным преимуществом система адаптивного управления ℒ1 является четкое отделение эффективности и робастности чем других адаптивных алгоритмов управления. Архитектуры ℒ1 адаптивной теории управления гарантированы переходные эффективности и робастности во время быстрой адаптации, без соблюдения постоянного возбуждения, применяя усиления- планирование, или прибегать к обратной связи с высоким коэффициентом усиления [7].
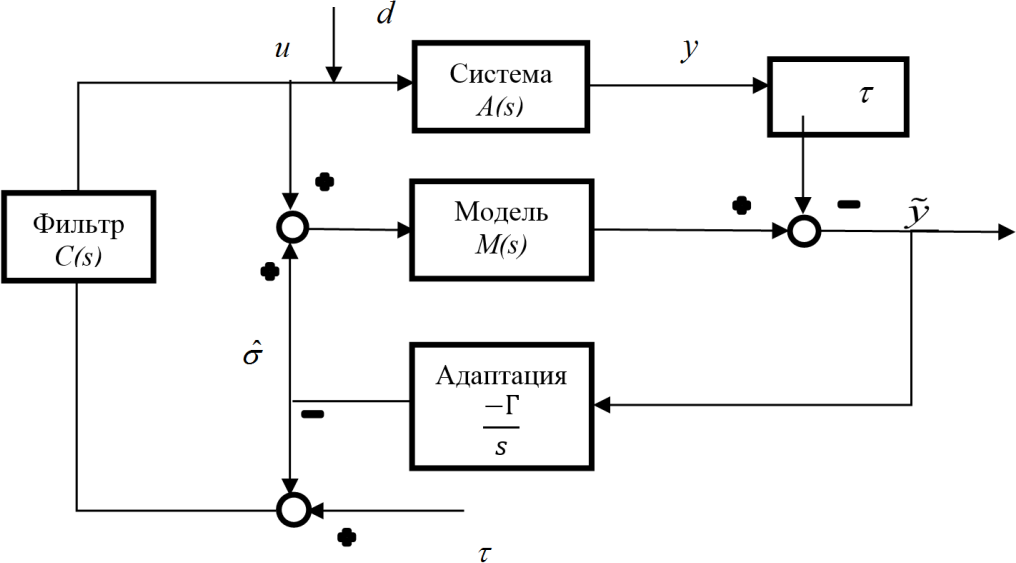
Рисунок 1. Схема системы Л1 адаптивного управления
и выхода с обратной связью (источник: разработано авторами)
На рис. 1 показана схема адаптивного управления. Возмущение d(s) представляет собой любой тип нелинейного возмущения. Таким образом, можно представлять не только внешние возмущении, но и изменение двигателей установки А (s) из-за изменений параметров или недостатках исполнительных. Заметим, что, если С (S) = 1, ПИ-регулятор с высоким коэффициентом усиления восстанавливается.
ˆ = адаптивный сигнал, u = сигнал управления, C(s) = Фильтр низких частот (Low-pass
filter), = задержка времени измерения типичного датчика.
Добавление фильтра низких частот (Low pass filter) C(s)есть два важные преимущества. Во-первых, он ограничивает пропускную способность управляющего сигнала u отправленных на двигатель установки. Во-вторых, часть адаптивного сигнала ˆ , отправляющая в модель М(s) получает высокочастотную частью.
1.2 ПИД регуляторы
Сигнал с полетного контроллера поступает не напрямую на двигатель, а на так называемый ПИД-регулятор, который исходя из входного сигнала выдает двигателю соответствующее напряжение. ПИД-регулирование - необходимая технология для управления квадрокоптером.
Например, имеется дрон которому необходимо повернуться на 60 градусов относительно центра масс. Движение вокруг центра осуществляется подачей на его привода требуемой угловой скорости вращения. Для того, чтобы повернуться именно на 60 градусов необходимую угловую скорость надо подавать по определённому закону. В момент, когда разность между текущим углом и требуемым ещё значительна, угловая скорость должна быть высокой. При уменьшении же разности должна уменьшаться и скорость. Когда разность окажется равна 0, угловая скорость также должна равняться 0. Однако, такой закон не представляется возможным определить заранее, потому что квадрокоптер обладает моментом инерции, и он способен просто пролететь необходимое положение, а в этом случае придётся подавать скорость в обратном направлении. Самое стандартное решение в такой ситуации - сообщать необходимую скорость как разность требуемого положения и текущего, умноженную на определённую неотрицательную постоянную. Подобный алгоритм называется П регулятором. Однако, такой алгоритм обладает существенным недостатком: в случае, когда требуемое угловой положение вращается с определённой угловой скоростью, то дрон никогда не догонит эту точку. Рано или поздно наступит момент, когда угловая скорость, выверенная П регулятором, будет равна угловой скорости вращения необходимого положения. Для качественного решения данной задачи рекомендуется сложить скорость от П регулятора со скоростью, рассчитанной как интеграл по времени ошибки по углу, умноженный на определённую неотрицательную постоянную. В такой ситуации необходимая скорость будет тем выше, чем дольше дрон не способен занять требуемое угловое положение. Данный алгоритм является ПИ регулятором. Но и этот алгоритм можно доработать. В момент, когда ошибка по углу будет равняться 0, дрон под действием сил инерции пролетит нужное положение, при условии, что его скорость до этого была относительно высокой. Чтобы этого избежать необходимо совершать торможение чуть быстрее, когда ещё ошибка мала, а именно - к требуемой скорости от ПИ регулятора добавить производную ошибки по времени, которая в свою очередь умножается на положительную постоянную. Это и есть ПИД регулятор.
Пропорционально-интегральное-дифференциальное управление может быть представлено следующей схемой:
Рис.3. Принципиальная схема ПИД-регулятора
В блокеprocess содержится описание объекта управления (его модель), в центральной части схемы представлен сам регулятор, который отрабатывает сигнал ошибки(рассогласования) задающего сигнала и измеренного значения с объекта управления. Ошибка в данной схеме поступает одновременно на все три блока параллельно, при этом:
в блоке P происходит умножение соответствующего коэффициента пропорциональной составляющей на величину ошибки;
в блоке I происходит интегрирование ошибки и умножение полученной величины на коэффициент  ; ;
в блоке D происходит дифференцирование ошибки с умножением на коэффициент  ; ;
Уравнение ПИД регулятора:
 , ,
(t) - выходная величина регулятора;(t) -сигнал рассогласования(ошибка);, I, D - пропорциональная, интегральная и дифференциальная составляющие;
 - коэффициенты ПИД регулятора; - коэффициенты ПИД регулятора;
Распространены также следующие модификации уравнения ПИД регулятора:
 , ,
 , ,
Взаимосвязь коэффициентов, входящих в выражения и существует, но отсутствие общепринятой системы параметров почти всегда приводит к путанице. Если происходит замена одного ПИД регулятора на другой или же если происходит настройка параметров - это нужно учесть.
Пользуясь преобразованием Лапласа при нулевых начальных условиях, представим передаточную функцию ПИД регулятора в операторной форме:
 , ,
 . .
На рис. 4 изображены амплитудно-частотная(АЧХ) и фазо-частотная(ФЧХ) характеристики операторной передаточной функции. В области нижних частот АЧХ и ФЧХ определяются интегральным членом, в области средних частот - пропорциональным, в области высоких - дифференциальным[3].
Рис.4. АЧХ и ФЧХ ПИД-регулятора
Вид АЧХ и ФЧХ регулятора определяет его точность и запас устойчивости. Из рисунка 2 следует, что при уменьшении интегральной составляющей , происходит увеличение модуля коэффициента усиления регулятора на нижних частотах (то есть при приближении к установившемуся режиму), следовательно, погрешность «e» начинает снижаться.
При повышении дифференциальной компоненты происходит усиление на высоких частотах, что влечёт за собой усиление шумов измерений и внешних возмущений. Исходя из этого следует, что дифференциальную составляющую используют только для улучшения формы переходного процесса в системе, тогда как её практическая реализация зачастую содержит фильтр высоких частот(ФВЧ).
Рис.5. ПИД-регулятор в системе с шумом и внешними возмущениями f(t)
Повышение пропорционального коэффициента K влечёт за собой увеличение модуля петлевого усиления контура регулирования, а также увеличение точности во всём диапазоне частот, однако запас по фазе и усилению начинает снижаться, что ухудшает робастность и качество регулирования системы, а при дальнейшем увеличении пропорциональной составляющей K возникают периодические колебания (система теряет устойчивость). Воздействие помех измерений f и шума снижается с ростом петлевого усиления и пропорционального коэффициента.
1.3 Полетный контроллер
Полетный контроллер - это основная плата управления, обеспечивающая функционирование мультикоптера. В качестве вычислительного центра платы управления используется микроконтроллер, зачастую это либо маломощные Atmega328, либо более современные, Atmega2560 или ARM-контроллеры (STM32)
К функциям полетного контроллера относятся:
Стабилизация аппарата в воздухе
Удержание высоты (при помощи барометра) и позиции (при помощи GPS)
Автоматический полет по заданным заранее точкам (опционально)
Передача на землю текущих параметров полета с помощью модема или Bluetooth (опционально)
Обеспечение безопасности полета (возврат в точку взлета при потере сигнала, автопосадка)
Подключение дополнительной периферии: OSD, светодиодной индикации и пр.
Количество функций зависит от наличия на борту мультикоптера соответствующей периферии, в бюджетных контроллерах ряд функций может отсутствовать.
Используемый в данном проекте полетный контроллер ArduPilot Mega является полноценным решением БПЛА, который позволяет помимо радиоуправляемого дистанционного пилотирования - автоматическое управление по заранее созданому маршруту, т.е. полет по точкам, а также обладает возможностью двухсторонней передачей телеметрических данных с борта на наземную станцию (телефон, планшет, ноутбук, DIY) и ведение журнала во встроенную память.
Он основан на автопилоте APM 2.x, разрабатываемым сообществом DIY Drones и базирующийся на open-source проекте, позволяющий превратить любой аппарат в автономное средство и эффективно использовать его не только в развлекательных целях, но и для выполнение профессиональных проектов.
Особенности:
3 осевой гироскоп, акселерометр, магнитометр и высокоточный барометр
Система стабилизации с возможностью воздушной акробатики
Удержание позиции по GPS, полет по точкам и возврат на точку старта
Возможность использования инфракрасного датчика для обхода препятствий
Поддержка ультразвукового датчика (sonar sensor) для автоматического взлета и посадки
Автоматическое следование по маршрутным точкам
Управление двигателями посредством ШИМ (PWM) с использованием дешевых регуляторов скорости (ESC)
Собственная система стабилизации для камеры (функция контроллера подвеса)
Радиосвязь и телеметрия с борта
Поддержка множества рам и конфигураций аппаратов
Поддержка датчика уровня заряда батареи
Настраиваемая световая индикация при полетах
Совместим с многими радиоуправляемыми приемниками PWM и PPM сигналов
Передача в реальном времени телеметрических данных
Поддержка OSD телеметрии (наложение на видеопередачу телемерических данных) используя протокол MAVLINK
Конфигурирования точек полета посредством Google Maps
Бортовая флеш память 16Мбит для автоматической регистрации данных
Цифровой компас работает на HMC5883L (до версии 2.5.2)
6 степеней свободы в InvenSense акселерометре , гироскоп MPU-6000
Контроллер Atmel ATmega2560-16AU и ATMEGA32U-2 чип для обработки и функции USB
Возможно загрузка обновлений встроенного программного обеспечения и конфигурации
Ниже описаны некоторые режимы полета, доступные контроллеру:
Stabilize - удержание горизонта,
AltHold - удержание высоты,
Loiter -«замри и слоняйся»,
Return-to-Launch - вернуться на точку старта,
Auto - выполнение заданного маршрута в автоматическом режиме,
Acro - акробатика (отключение всех стабилизационных систем),
Circle - облет по кругу заданного радиуса,
Position - фиксация в воздухе с ручным газом взлета
Land - автоматическая посадка
Simple - «легкий» полет
Контроллер предусматривает возможность самостоятельно программировать режимы полета.
1.4 Фильтр Калмана
В практической части работы используется алгоритм фильтрации, называемый фильтром Калмана. Это один из самых действенных методов фильтрации данных в частности в робототехнике.
Фильтр Калмана использует динамическую модель системы (например, физический закон движения), известные управляющие воздействия и множество последовательных измерений для формирования оптимальной оценки состояния. Алгоритм состоит из двух повторяющихся фаз: предсказание и корректировка. На первом рассчитывается предсказание состояния в следующий момент времени (с учетом неточности их измерения). На втором, новая информация с датчика корректирует предсказанное значение (также с учетом неточности и зашумленности этой информации)
Рис.6. Схема фильтра Калмана
Уравнения представлены в матричной форме. В случае с одной переменной матрицы вырождаются в скалярные значения.
В данных обозначениях: подстрочный индекс обозначает момент времени: k - текущий, (k-1) - предыдущий, знак «минус» в верхнем индексе обозначает, что это предсказанное промежуточное значение.
Описание переменных представлены на следующих изображениях[4]:
Рис.7. Уравнение предсказания
Рис.8. Уравнение корректировки
2. Математическая модель квадрокоптера
Квадрокоптер представляет собой летательный аппарат с четырьмя винтами. Его винты
закреплены на двух пересекающихся крест-накрест балках и вращаются попарно в
противоположных направлениях, как показано на рис. 2. Центр масс квадрокоптера находится
на пересечении балок, т. е. в его геометрическом центре. Обозначим оси глобальной системы
координат E, связанной с землей, как X, Y, Z; а оси локальной системы координат B, связанной
с центром масс квадрокоптера, – x, y, z (рис. 2).
Рисунок 2. Кинематическая схема квадрокоптера (источник: разработано авторами)
На квадрокоптер действуют аэродинамические силы тяги несущих винтов T1, T2, T3,
T4, приложенные к их центрам масс роторов А1, А2, А3, А4 соответственно и силы тяжести
корпуса mCg и винтов mig (рис. 2), моменты сопротивления вращению винтов, силы
сопротивления движению корпуса квадрокоптера в воздушной среде, а также силы,
возникающие в результате движения воздуха относительно корпуса квадрокоптера
(возмущающее воздействие) [7], [8].
Где:
w1,w2,w3,w4 : скорости вращения (угловая скорость) пропеллеров;
T1,T2 ,T3,T4 : подъемные силы;
F
i µwi 2
: на основе формы пропеллера, плотности воздуха и т. д.;
m: масса квадрокоптера;
mg: вес квадрокоптера;
f,q,y : углы поворота относительно осей X, Y и Z соответственно.
Положение квадрокоптера определяется в инерциальной системе координат x, y, z и ξ.
Угловое положение определяется в инерциальной системе с тремя углами Эйлера η. Угол
тангажа θ определяет вращение квадрокоптера вокруг оси-y. Угол крена φ определяет вращение
вокруг оси-x и угол рыскания ψ вокруг оси z. Вектор q представляет совой линейные и угловые
векторы положения [9], [10].

Определим линейные скорости JB и угловые скорости ω в следующем виде.
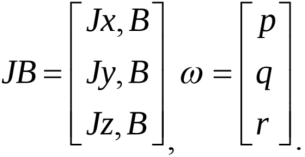
Матрица поворота квадрокоптера в следующем виде.
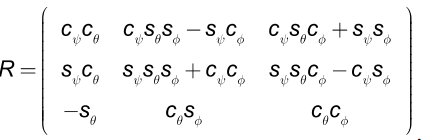
где: Sx = sin(x) и Cx = cos(x). Матрица вращения R ортогональна, поэтому R-1 = RT .
Существует 3 типа угловых скоростей, которые могут описываться как производная от
(φ, θ, ψ) относительно по времени,
= Скорость крена, = Скорость тангажа,
= Скорость рыскание.
Рассматривая условие зависания квадрокоптера дает 4 уравнения сил, направлений,
моментов и скоростей вращения. Они описываются в следующим:
Равновесие сил:
4
i 1
T
i = -mg;
Равновесие направлений:
;
Равновесие моментов:
Mi = 0;
Равновесие скоростей вращения: (w1 +w3)- (w2 +w4 ) = 0;
И следствие: = 0, = 0,
= 0.
Квадрокоптер может перемещать движения вверх и вниз при увеличении или
уменьшении скорости вращения всех пропеллеров:
Вверх:
T
i > -mg. Вниз:
T
i < -mg. Углы Эйлера и скорости остаются 0.
Изменение равновесия скорости, направлений и моментов пропеллеров дает следующие
уравнения рыскания, крена и тангажа квадрокоптера.
Рыскание:
(4)

Крена: 
Тангажа: 
Таким образом, уменьшение скорости второго ротора и увеличение скорости 4-го ротора
приобретают движение крена. Так же, уменьшение скорости первого ротора и увеличение
скорости 3-го ротора приобретают движение тангажа. Увеличение угловых скоростей двух
противоположных роторов и уменьшение скоростей двух других приобретают движение
рыскания [11], [12].
3. Уравнение движения
Пусть коэффициент пропорциональности k и F = T , каждое уравнение движения
квадрокоптера описываются в следующим:
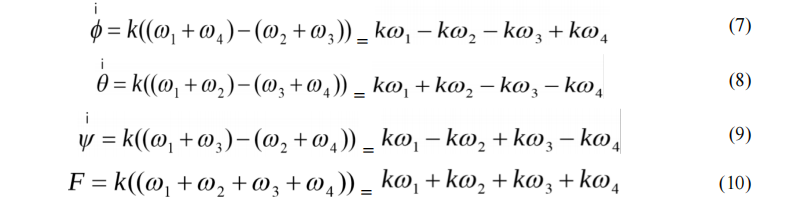
С помощью матриц и получим;
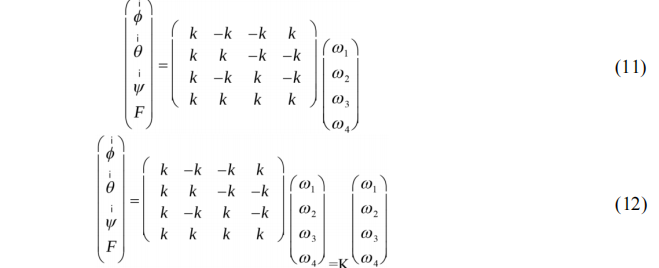
Согласно уравнению (8), управление четырьмя силами (тангажа, крена, рыскание и сила
тяги) может описываться в следующим:
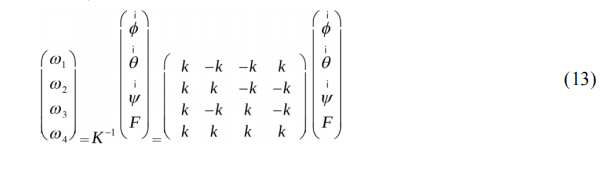

Рисунок 3. Функциональная схема системы управления (источник: разработано авторами)
4. Алгоритм управления обратной связью для управления полетом квадрокоптера
Для управления полетом квадрокоптера пользуют сигналы от датчиков (например,
3-осевой гироскоп, акселерометр и т. д.). Полученные значение будем сравнить значение меры
с требуемой уставкой и применить исправление к системе на основе ошибки.
В работе был создан специальный алгоритм, позволяющий обходить особые точки и
осуществлять решение задачи на всем интервале изменения обобщенных координат.
Параметры алгоритма управления определяются по методике, в основе которой лежит
минимизация отклонения реальной траектории от заданной. Аналогичные алгоритмы
управления разработаны для движения квадрокоптера при спуске и движении по заданной
траектории.
ПИД регулятор и функции:

Получим:

В дискретном форме (k th текущего дискретизация):

где: константы Kp, Ki , Kd определить поведение регулятора:
Kp управляет краткосрочным действием;
Ki управляет долгосрочным действием;
Kd управляет действием на основе «тенденции ошибки».
Константы Kp, Ki , Kd оцениваются с использованием метода Циглера-Николса [13].
Основная схема алгоритма показана на рисунке 4, 5. В этих схемах входные параметры
к ПИД-регулятора являются сигналами ошибках скорости ротора, и производном сигналом
ошибки, который соответствует переменных ПИД.
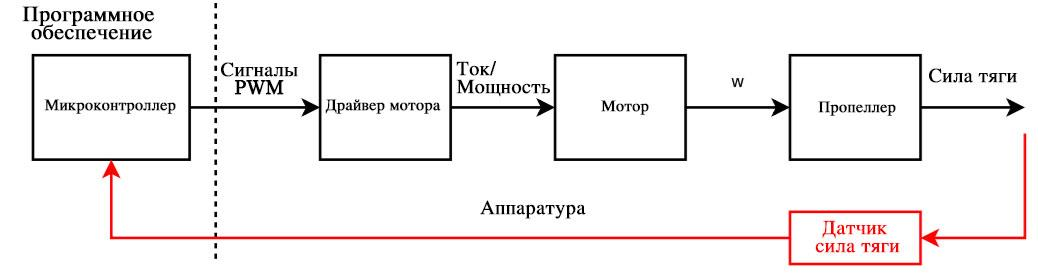
Рисунок 4. Основная схема системы управления
квадрокоптера (источник: разработано авторами)
С другой стороны, система управления с обратной связью можно выразить следующим
образом:
Рисунок 5. Полная схема системы управления
квадрокоптера (источник: разработано авторами)
5. Моделирование
Математическое моделирование проводится в программных средах Matlab Simulink
2013 с использованием языка программирования Matlab. Значении параметров моделирования
представлены в таблице 1 и 2.
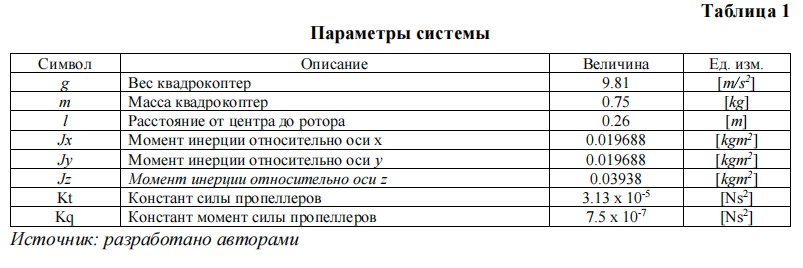
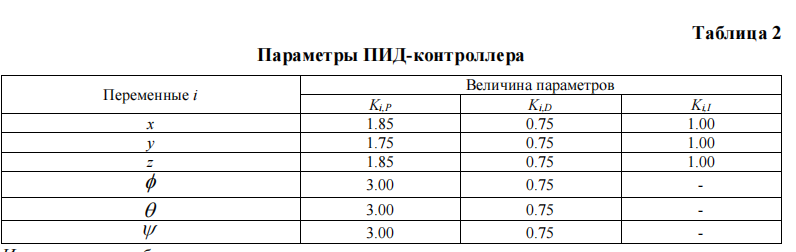
Результаты моделирования параметров ωi, ξ, η представлены на рисунках 6, 7 и 8.
Высоты и углы стабилизируются к нулевому значению через 5 секунд. Положение
квадрокоптера близко к запланированной позиции через 4 секунды. Результаты стабильность
угловых положений при моделировании позволяет получить достижения запланированной
позиции, скорости и ускорения квадрокоптера. Значения входных параметров управления
колебались в процессе ускорения, но их поведение стало более стабильным.
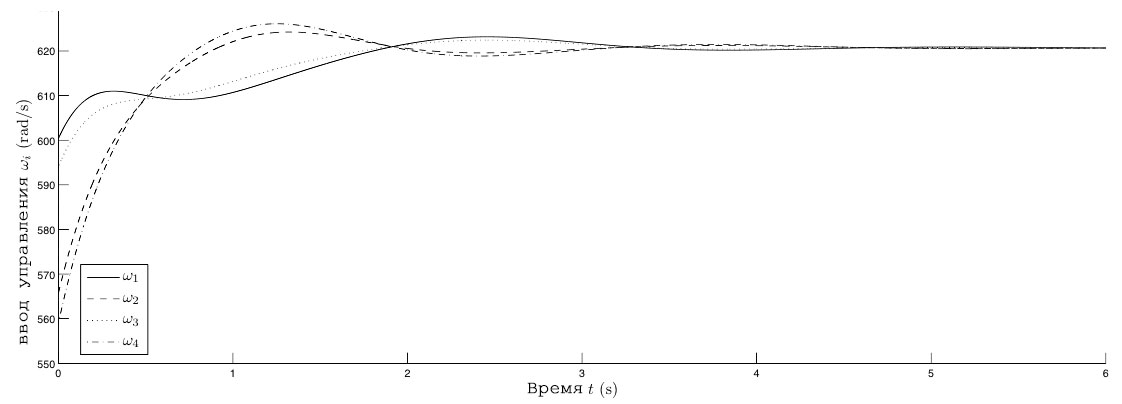
Рисунок 6. Входные параметры ωi (источник: разработано авторами)
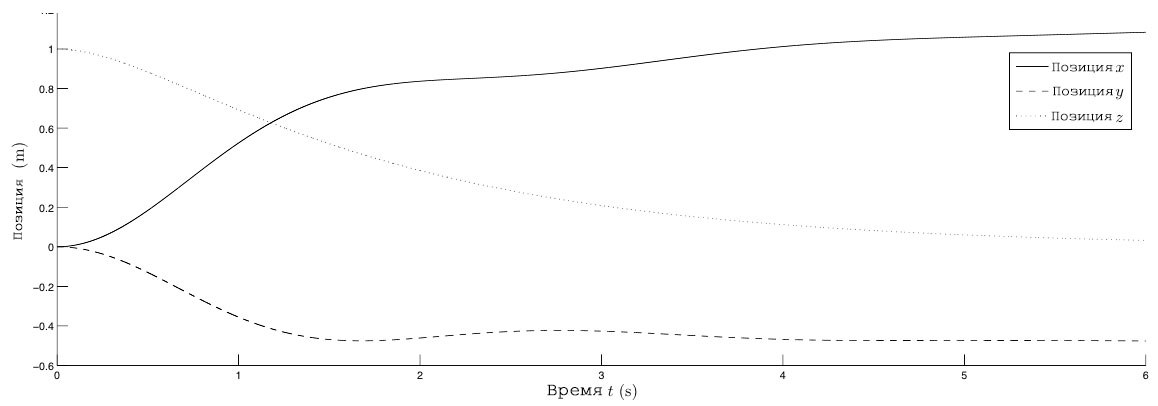
Рисунок 7. Позиции x, y, и z (источник: разработано авторами)
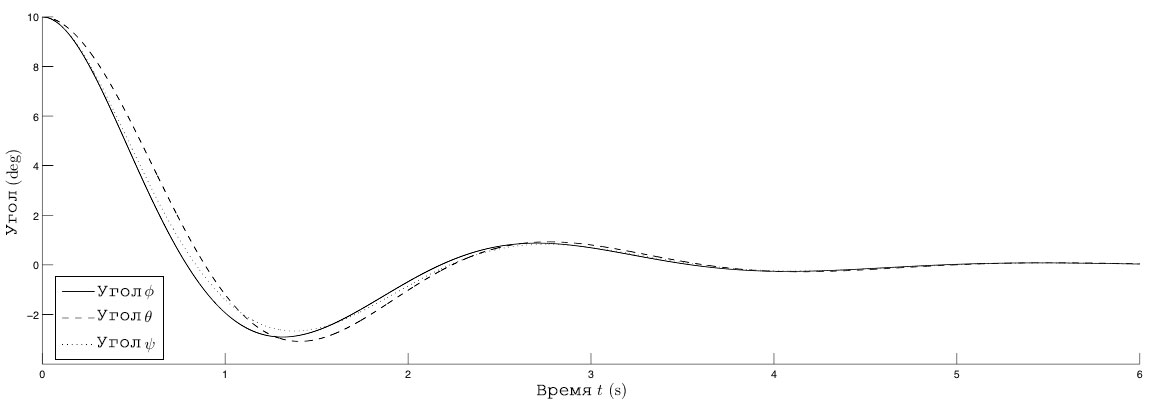
Рисунок 8. Углы f,q,y (источник: разработано авторами)
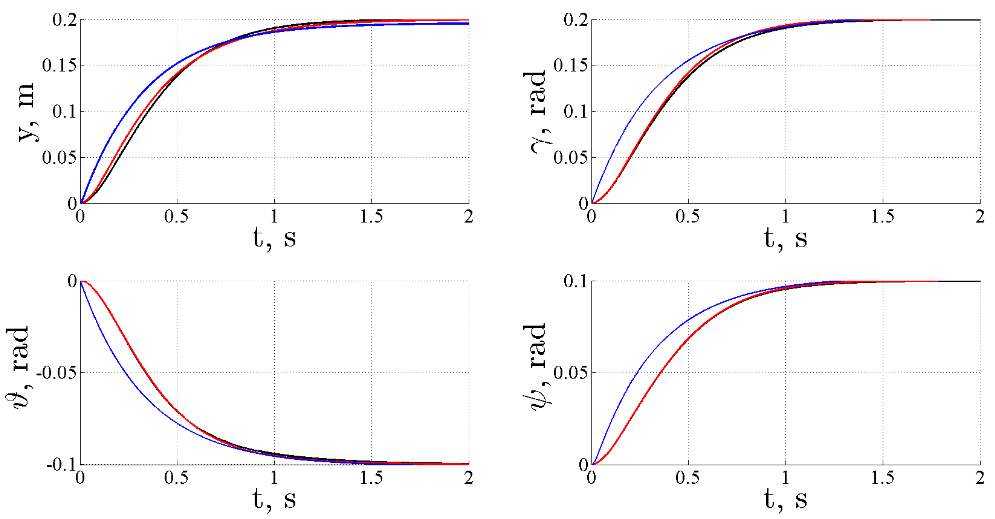
Рисунок 9. Зависимость изменении координатов квадрокоптера
от времени при использовании алгоритма на основе L1 адаптивного управления
(источник: разработано авторами)
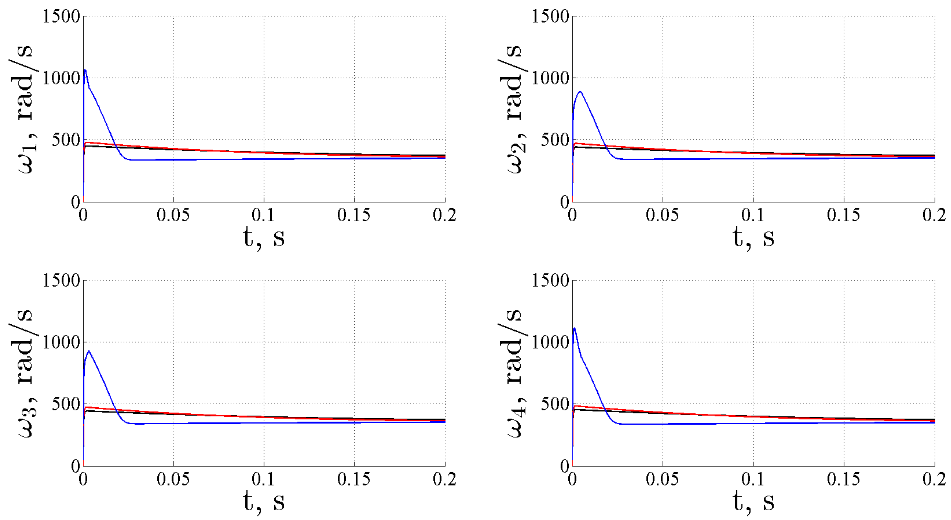
Рисунок 10. Зависимость изменении угловых скоростей квадрокоптера
от времени при использовании алгоритма на основе L1 адаптивного управления
(источник: разработано авторами)
Исследован квадрокоптер заданного класса как объект управления. Изучили анализ,
математическое моделирование и управление квадрокоптер. Разработаны и представлены
математическая модель и алгоритма управления квадрокоптер, которые были реализованы при
моделировании в режиме реального времени. Результаты моделирования показывают
эффективность и стабильность ПИД-регулятора, которые позволяют управлять траектории и
высоты полета квадрокоптер.
ЛИТЕРАТУРА
1.
Пупков К. А., Гаврилов А. И., Шахназаров Г. А. Комплексирование Технологий
Управления В Интеллектуальных Системах Высокой Точности И Надежности //
Вестник Российского университета дружбы народов. Серия: Инженерные
исследования. 2011. № 4. С. 60-67.
2.
Altug E., Ostrowski J. P., Mahony R. (2002). Control of a Quadrotor Helicopter using
Visual Feedback”, Proceed. IEEE Int. Conference Robotics Automation, (1): P. 72-77.
3.
Olfati-Saber R. Nonlinear Control of Underactuated Mechanical Systems with
Application to Robotics and Aerospace Vehicles. PHD thesis in Electrical Engineering
and Computer Science. (2001) Massachusetts Institute of Technology.
4.
L1 adaptive output feedback controller for systems of unknown dimension // IEEE
Transactions on Automatic Control, vol. 53, no. 3, P. 815-821, 2008.
5.
Cao C., Hovakimyan N. L1 adaptive controller for systems with unknown time-varying
parameters and disturbances in the presence of non-zero trajectory initialization error//
International Journal of Control, vol. 81, no. 7, P. 1148-1162, 2008.
6.
Гаврилов А. И., Чжо Мьят Ту, Будникова Е. А. Синтез Системы Автоматического
Управления Квадрокоптером // Сб. науч. Тр. «Управление В Морских И
Аэрокосмических Системах» (УМАС–2014), 7-9 октября 2014 г., Санкт-
Петербург. С. 621-624.
7.
Чжо Мьят Ту, Моделирование Системы Автоматического Управления
Квадрокоптером // Наука и образование. МГТУ им. Н.Э. Баумана. Электрон.
журн. 2014. №11. Режим доступа: http://sntbul.bmstu.ru/doc/741283.html ((дата
обращения 20.11.2014).
8.
Kyaw Myat Thu, Gavrilov A. I. Analysis, Design and Implementation of Quadcopter
Control System // 2015 5th International Workshop on Computer Science and
Engineering: Information Processing and Control Engineering, WCSE 2015-IPCE
2015, BMSTU, Russia, April 15-17, 2015.
9.
Емельянова О. В., Яцун С. Ф., Попов Н. И. Изучение движения квадрокоптера в
вертикальной плоскости (научная конференция издательства Молодой ученый) //
Актуальные вопросы технических наук: материалы и междунар. науч. конф. (г.
Пермь, февраль 2013 г.).
10.
Madani T., and Benallegue A. // Backstepping control for a quadrotor helicopter //
IEEE/RSJ International Conference on Intelligent Robots and Systems, 2006, pp. 3255-
3260.
11.
Castillo P., Lozano R. and Dzul A. Stabilisation of a mini rotorcraft with four rotors //
IEEE Control Systems Magazine, 2005, P. 45-55.
12.
Martin P. and Salau ̈n E. The true role of accelerometer feedback in quadrotor control
// IEEE International Conference on Robotics and Automation, 2010, P. 1623-1629.
13.
Метода Циглера-Николса. Режим доступа: http://www.engr.mun.ca/nick/eng5951/
Ziegler_Nichols.pdf.
14.
Mahony R., Kumar V. and Corke P. Multirotor Aerial Vehicles, Modeling, Estimation,
and Control of Quadrotor // Robotics Automation Magazine, IEEE, vol. PP, iss. 99.
2012. P. 20-32
|
|
|
 Скачать 1.18 Mb.
Скачать 1.18 Mb.