шпаргалка. 1. Информация, данные, определение и назначение Информация
 Скачать 0.54 Mb. Скачать 0.54 Mb.
|

|
Часть аппаратов, таких как, например, аппараты защиты, предпочтительнее диагностировать в процессе испытания и настройки, а коммутационные аппараты — при техническом обслуживании с помощью стационарных средств. Наиболее достоверным методом диагностирования с помощью встроенных средств, так как с любого аппарата в процессе работы можно снять самую объективную информацию, учитывающую влияние всех факторов. Поэтому сочетание встроенных и стационарных средств контроля является оптимальным вариантом при разработке систем технического контроля. Диагностирование цепей управления локомотивом и низковольтной аппаратурой необходимо проводить встроенными средствами. Диагностирование групповых контакторов (силовых и реостатных контроллеров, ЭКГ-8 и др.) предпочтительнее выполнять на специализированных стендах, на которых установлены постоянные или временные датчики позиций. Проверка цепей управления блоками диагностики: Устройства ПУМ-"Шкода" типа 2 КСЛ 1 для быстрого контроля основных цепей управления. На панели управления блока диагностики расположены следующие аппараты: 1. Главный переключатель для ввода в действие блока и выбора проверяемой цепи; 2. Переключатели для подключения проверяемой цепи к блоку диагностики (подключают цепи: линейных контакторов, вспомогательных машин, сигнализации, набора позиций, сброса позиций и реостатных контакторов); 3. Амперметр для определения силы тока, потребляемого аппаратами проверяемой цепи; 4. АЗВ "Р" - предохраняющий цепи от к. з.; 5. Контрольные лампы красного цвета, сигнализирующие при включении выключателей о выбранной для контроля цепи; 6. Контрольные лампы синего цвета, сигнализирующие о том, что в точках контроля выбранной цепи есть напряжение; 7. Выключатели контроля, шунтирующие разомкнутые или неисправные контакты в цепи. Для проверки цепей блоками диагностики необходимо: затормозить электровоз; выключить ВУ 301(выключатель управления) и БВ 021(быстродействующий выключатель); включить заземлители; перекрыть разобщительные краны к клапанам токоприемников; проверяемую цепь отключить соответствующим АЗВ (автоматический защитный выключатель); на блоке диагностики включить АЗВ "Р" ПО); переключателем А8 (главный переключатель для ввода в действие блока и выбора проверяемой цепи) произвести выбор проверяемой цени, а переключателями А1 --А7 (переключатели для подключения проверяемой цепи к блоку диагностики) подключить се к блоку диагностики. [Основным устройством обнаружения дефектов в цепях управления является лампа — «прозвонка», с помощью которой можно найти дефект: контакт имеется — лампа горит, нет контакта — лампа не горит. В условиях депо электрические устройства требуют частых выключений, поэтому устройства диагностирования должны иметь элементы памяти. Они выполнены в виде отдельных модулей и подключаются к проверяемой цепи через быстросъемные разъемы]. 33. Микропроцессорные системы управления локомотивов. Диагностические функции МСУ МСУД-Н предназначена для управления тяговым электроприводом и электрическими аппаратами пассажирских электровозов типа ЭП1М, ЭП1П, магистральных грузовых электровозов переменного тока с коллекторными ТЭД и др. типов электровозов, в том числе работающих по СМЕ. МСУД-Н реализует функции автоматического управления режимами движения, контроля состояния оборудования электровоза, выдачи машинисту и запись в энергонезависимый съёмный накопитель информации о состоянии оборудования. [МСУД состоит из шкафа с темя контроллерами: центрального (обеспечивает обмен информацией между всеми контроллерами управления и ПМ) и 2-х технологических с разделёнными функциями управления электрооборудованием, диагностики и возможностью передачи управления друг другу при реконфигурации в случае повреждения одного из контроллеров, а так же блока индикации. Блок управления БУ-193, расположенный в высоковольтной камере (для управления тяговым приводом и электрооборудованием электровоза в режимах тяги и рекуперации, диагностики состояния оборудования электровоза); 2 блока индикации ВС3641, расположенный на ПМ (для ввода графической информации машинисту о заданных и истинных величинах контролируемых параметров, состояния оборудования и системы управления, режимах работы оборудования и т. д.]. МСУ для задач диагностирования выполняют следующие функции: 1. Сбор данных (опрос датчиков), обработка и сохранение данных. 2. Визуализация информации машинисту. 3. Поддержка принятия решений машиниста. 4. Передача информации на АРМ МСУ (через флешь-память, Wi-Fi, GPRS и/или другим способом). 5. Анализ данных на АРМ МСУ. 34. МСУД электровозов переменного тока. Основные контролируемые МСУД параметры электровоза. Основное назначение. Заводы производители МСУД-Н предназначена для управления тяговым электроприводом и электрическими аппаратами пассажирских электровозов типа ЭП1М, ЭП1П, магистральных грузовых электровозов переменного тока с коллекторными ТЭД и др. типов электровозов, в том числе работающих по СМЕ. МСУД-Н реализует функции автоматического управления режимами движения, контроля состояния оборудования электровоза, выдачи машинисту и запись в энергонезависимый съёмный накопитель информации о состоянии оборудования. [МСУД состоит из шкафа с темя контроллерами: центрального (обеспечивает обмен информацией между всеми контроллерами управления и ПМ) и 2-х технологических с разделёнными функциями управления электрооборудованием, диагностики и возможностью передачи управления друг другу при реконфигурации в случае повреждения одного из контроллеров, а так же блока индикации. Блок управления БУ-193, расположенный в высоковольтной камере (для управления тяговым приводом и электрооборудованием электровоза в режимах тяги и рекуперации, диагностики состояния оборудования электровоза); 2 блока индикации ВС3641, расположенный на ПМ (для ввода графической информации машинисту о заданных и истинных величинах контролируемых параметров, состояния оборудования и системы управления, режимах работы оборудования и т. д.]. МСУД в процессе управления контролирует все основные сигналы локомотива: скорость, ток, напряжение, режим работы, срабатывание аппаратов защиты и др. – всего 72 дискретных, 24 аналоговых и 24 импульсных сигнала. [МСУД осуществляет непрерывное (с дискретностью в 10 мс) диагностирование. МСУД имеет в составе два комплекта аппаратуры (МПК-1 и МПК-2). У МСУД есть свой АРМ для анализа диагностических данных, которые считываются при помощи переносной флеш-памяти («флешки»)]. Заводы изготовители: МСУД выпускался в ОАО «ИРИС» и ОАО НПО «РИФ». В настоящее время разработчиком и производителем аппаратного и программного обеспечения МСУД и АРМ МСУД является ЗАО «Локомотивные электронные системы» (ЛЭС), созданное при НЭВЗ и ВЭлНИИ в г. Новочеркасске. МСУД фиксирует следующие параметры электровоза: 1. токи каждого тягового двигателя (ТЭД); 2. напряжение на каждой паре ТЭД (на выходе каждого ВИП); 3. скорость вращения каждой колесной пары; 4. срабатывание аппаратов защиты; 5. состояние пульта машиниста (управляющие воздействия); 6. комплекс параметров управления ВИП (алгоритм, углы импульсов управления и др.) 7. режим работы локомотива; 8. сигналы датчиков тока, угла коммутации и др.; 9. другие параметры цепей управления электровоза; 10. сигналя с приборов безопасности КЛУБ-У и САУТ-ЦМ (практически не фиксируются, хотя возможность есть). При этом МСУД-Н реализует следующие функции: 1. ввод сигналов задания с контроллера управления электровозом; 2. ввод и обработка сигналов с датчиков тока (ДТ) тяговых электродвигателей (ТЭД); 3. ввод и обработка сигналов с ДТ возбуждения ТЭД; 4. ввод и обработка сигналов с датчиков скорости (ДС); 5. ввод и обработка сигналов с датчиков напряжения в контактной сети (ДН); 6. ввод и обработка сигналов с датчиков напряжения на ТЭД и т. д. Четыре узла МСУД-Н: 1. МСУД-Н-БУ – подсистема управления ВИП, ВУВ, ШТ; 2. МСУД-Н-ДСП – подсистема диспетчеризации; 3. МСУД-Н-ВВ – подсистема ввода вывода сигналов; 4. Среднего уровня бортового компьютера БК. 35. МСУД электровозов переменного тока. Типы СУ на электровозах различных серий МСУД-Н предназначена для управления тяговым электроприводом и электрическими аппаратами пассажирских электровозов типа ЭП1М, ЭП1П, магистральных грузовых электровозов переменного тока с коллекторными ТЭД типа Э5К, 2,3ЭС5К, бустерной секции и др. типов электровозов, в том числе работающих по СМЕ. МСУЭ («Микропроцессорная система управления и диагностирования электровозов») является функциональны аналогом МСУД. Изготовитель: завод «Электро СИ». Головной разработчик аппаратной и программной части – Дорожный центр внедрения Красноярской ж.д. (г. Красноярск). МСУЭ разработан по заданию ОАО «РЖД» для электровозов ВЛ80р. В настоящее время в эксплуатации находится 50 электровозов с МСУЭ. МСУЭ также имеет блок индикации (БИ) – по одному в каждой кабине машиниста. Накопитель информации находится в БИ. МСУД электровоза 2ЭС4К. Система МСУД-001 предназначена для: 1. управления общеэлектровозной аппаратурой; 2. управления контакторной аппаратурой цепей тяговых двигателей и цепей собственных нужд; 3. сбора и обработки информации с органов управления и датчиков (контроллер машиниста, выключатели, блокировки реле и контакторов, датчики температуры и т.д.); 4. выдачи заданий преобразователям собственных нужд (ПСН) и возбуждения (ПВ); 5. реализации режима автоведения; 6. диагностирования состояния оборудования электровоза с выполнением - функций его защиты, выдачи соответствующей информации на дисплей и записи ее в съемный энергонезависимый накопитель. Аппаратные средства МСУД-001 построены по модульному принципу с использованием программных принципов обработки информации и имеют открытую архитектуру, что позволяет подключать дополнительные объекты контроля и управления электровозом, а также объединять системы управления нескольких электровозов в общую систему. При этом изменяется и дополняется только программное обеспечение отдельных модулей системы. 36. Автоматизированные рабочие места. Основное назначение АРМ. АРМ применяемые на ЖД Автоматизированное рабочее место (АРМ) – совокупность программных, методических и языковых средств, обеспечивающих работу пользователей ПК в некоторой предметной области (профессии). Комплекс АРМ обеспечивает ввод, адресную привязку и обработку всех технологических данных связанных с работой локомотивных бригад и тягового подвижного состава начиная с явки локомотивной бригады на работу и заканчивая сдачей маршрута машиниста и локомотива в депо. При этом обеспечивается информационно-логический, форматный и диапазонный контроль ввода данных на всех этапах обработки технологических данных. Этот комплекс АРМ обеспечивает внутреннюю работу депо и несущественно связан со сторонними для депо подразделениями. Виды АРМов применяемых на ЖД: - нарядчик локомотивных бригад; - старший нарядчик; - дежурный по депо; - инженер по эксплуатации; - группа учета - расшифровка скоростемерных лент; - теплотехник; - технологи депо; - паспортист депо; - кадры; - медицинский работник; - психолог; - руководство депо. [АРМ ТЧБ (нарядчика ЛБ) – является центральной составляющей комплекса АСУТ (автоматизированная система управления локомотивным хозяйством). В нём концентрируется вся информация о персонале, заносимая в др. АРМ комплекса и обеспечивающая корректную работу АРМ ТЧБ. Основная задача - автоматизация оперативной работы нарядчика по формированию журнала явок, т. е. постановке ЛБ и отдельных работников в наряд. АРМ ТЧД (дежурного по депо) – для оптимизации процесса управления работой локомотивов, должно обеспечивать наиболее выгодное использование рабочего времени локомотивов, своевременную постановку ТПС в ремонт и уменьшение межоперационных простоев в депо. АРМ инженера цеха эксплуатации – для контроля за соблюдением сроков периодической проверки знаний по безопасности движения у работников ЛБ, обеспечения инженера цеха эксплуатации всей необходимой информацией по персоналу ЛБ, возможностью ведения журналов ТО и производственных совещаний и др.]. 37. Информационные системы применяемые при организации обслуживания и обеспечения безопасности перевозочного процесса Подразумеваются системы, взаимодействие с которыми должно быть налажено в системе управления надежностью для получения исходной информации о надежности локомотивов. 1. Единое информационное пространство АСУЖТ – совокупность информационных и информационно-управляющих систем, работающих в единой сети передачи данных (СПД). 2. ЕК АСУФР (Единая корпоративная автоматизированная система управления финансами и ресурсами) – построена на базе всемирно известного пакета программ SAP R/3 (разработка и производство ФРГ и США). Достоверность в системе обеспечивается за счет невозможности финансовых проводок корпорации без ввода данных в систему. 3. Системы управления движением поездов: -АСОУП – это пакет программ, связанный с управлением движением поездов, работой сортировочных станций и маршрутами движения поездов. [ На базе АСОУП целый комплекс программ: 1. ДИСПАРК – управление вагонным парком; 2. ДИСКОН – управление контейнерными перевозками; 3. ДИСПТС – дислокация локомотивов. В рамках решения задач управления движением поездов внедрена система идентификации подвижного состава САИ «Пальма» (система идентификации – для фиксации проследования через заранее выбранные пункты считывания жд ПС). От пакета программ управления перевозочным процессом в 90-е годы ХХ века выделилась и затем превратилась в самостоятельное направление информатизации система электронных накладных для работы с клиентами в грузовом движении – ЭТРАН. Система является высоко достоверной и построенной на современном уровне. В пассажирском движении эксплуатируется автоматизированная система управления продажей билетов «Экспресс». Система также обладает высокой достоверностью имеющейся в ней информации. АСОУП – важный источник информации, однако прямое взаимодействие с системой не нужно, т.к. оно уже реализовано в АСУТ]. -ГИД «Урал-ВНИИЖТ» система ведения графика исполненного движения ГИД «Урал-ВНИИЖТ» активно используется во многих ремонтных локомотивных депо для поиска «кандидатов» на ремонт, контроля режима работы локомотива. Однако эту же информацию можно опосредовано взять и в АСУТ. -ДЦ и ДК. Важная группа АРМ в управлении движением – диспетчерская централизация (ДЦ) и диспетчерский контроль (ДК). АРМ позволяют контролировать занятость перегонов и блок-участков подвижным составом, показания светофором и стрелочных переводов. ДЦ также позволяет управлять маршрутами движения поездов. -АСУ-ЦТРпредставляет собой ERP-систему, позволяющую автоматизировать основные управленческие процессы Дирекции по ремонту тягового подвижного состава ОАО «РЖД» (ЦТР). Также содержит технологическую функциональность (например, АРМ Мастера). 4. Системы обработки маршрутов машинистов. Одна из первых информационных систем, появившихся в локомотивных депо, была система интегрированной обработки маршрутов машинистов формы ТУ-3 (ИОММ), создание которой было начато более 30 лет назад. В настоящее время логическим развитием ИОММ (создавались для каждой железной дороги отдельно) стало создание единой централизованной обработки маршрутов машиниста – ЦОММ. Маршрут машиниста – комплексный документ, содержащий информацию о работе локомотивов. Поэтому информация ИОММ и ЦОММ используется в качестве источника информации для «тяжелой» отчетности ОАО «РЖД». Достоверность информации в ЦОММ достаточно высокая, т.к. по этим данным рассчитывается заработная плата машинистов. 5. КАСАНТ - для управления надежностью технических систем в ОАО «РЖД» создана информационная система учета отказов технических средств «КАСАНТ». Система успешно используется для разбора браков в работе технических средств, отнесении ответственности за отказ. В КАСАНТ введено понятие «Критерий отказа»: признак или совокупность признаков нарушения работоспособного состояния объекта, установленные в нормативно-технической и конструкторской документации. Критичность отказа определена как совокупность признаков, характеризующих последствия отказа. Критерием отказа в локомотивном хозяйстве, является любое из следующих событий: 1. невыполнение графика движения поездов (масса, скорость, время хода по участкам и стоянок за одну поездку); 2. восстановления работоспособности локомотива (его сборочных единиц и деталей) локомотивной бригадой в пути следования без нарушения графика движения поездов; 3. необходимость выполнения непланового ремонта; 4. превышение установленного объема работ (восстановление, замена, регулировка) любой сборочной единицы локомотива на плановом техническом обслуживании или ремонте, вызывающее превышение нормы простоя или трудоемкости ремонта локомотивов, если это восстановление, замена регулировка не входит в объем обязательных работ. 6. Система учета и анализа надежности локомотива 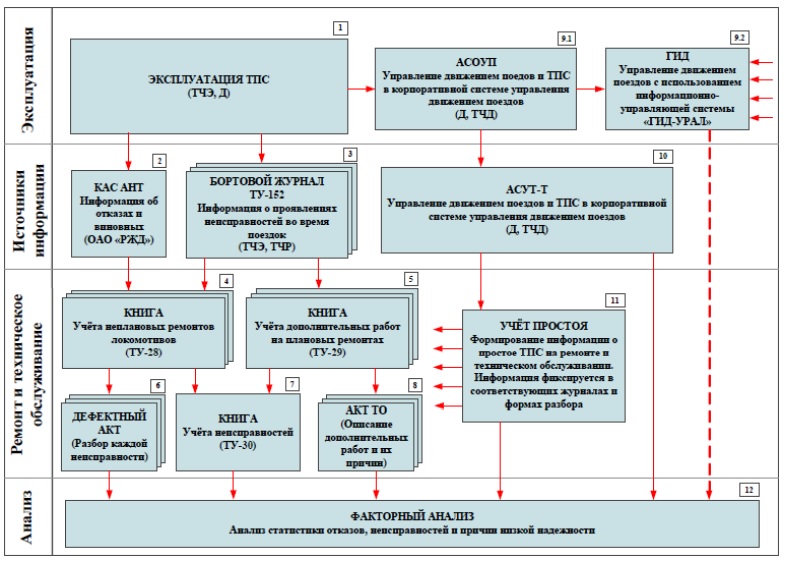 38. Приборы безопасности, используемые на ЖД транспорте. Основное назначение Для обеспечения безопасности движения на железнодорожном транспорте внедряются самые разнообразные технические средства, которые контролируют и дублируют действия машиниста или предупреждают машиниста о возникновении аварийных ситуаций. Локомотивные устройства безопасности предназначены для регулирования движения поездов с целью повышения безопасности в поездной и маневровой работе, а также повышения пропускной способности железнодорожных линий и улучшения условий труда локомотивных бригад. Основным источником информации о поездной ситуации на перегонах и станциях, начиная с 1937 года, является автоматическая локомотивная сигнализация (АЛС). С 1985 года на локомотивах стали устанавливать приборы безопасности, обеспечивающие дополнительный контроль бдительности машиниста и защиту от самопроизвольного движения локомотива. Это устройства контроля бдительности УКБМ, блоки Л143, Л132 «Дозор», Л168. В 1985 году разработана система автоматического управления тормозами локомотива САУТ, которая позволяла определять эффективность тормозной системы поезда, вести постоянный контроль над служебным торможением. В 1991 году система прошла модернизацию и под индексом САУТ-УМ стала устанавливаться на тяговый подвижной состав. С 1983 года на локомотивах устанавливаются устройства САУТ-Ц, а с 1998 года - САУТ-ЦМ. В настоящее время тяговый подвижной состав оснащается системами САУТ-ЦМ/485, КИО САУТ, САУТ-НСП. В 1994 году была разработана и испытана телемеханическая система контроля бодрствования машиниста ТСКБМ, которая позволяет вести постоянный контроль над уровнем бодрствования машиниста. В 1994 году было разработано комплексное локомотивное устройство безопасности КЛУБ, а в 1998 году унифицированный комплекс локомотивных устройств безопасности КЛУБ-У. В состав ЕКС (единую комплексную системуиуправления и обеспечения безопасности движения поездов) кроме КЛУБ-У входит унифицированная система автоведения поездов УСАВП, система автоматического управления торможением САУТ-ЦМ/485 и телемеханическая система контроля бодрствования машиниста ТСКБМ. С каждым годом расширяется внедрение современных технических средств обеспечения безопасности движения (ТСО БД), реализующих общую систему управления безопасностью движения поездов. Вводятся автоблокировка, автоматическая локомотивная сигнализация, диспетчерская и электрическая централизация, применяются современные системы для обеспечения безопасного вождения поездов машинистами (бортовые системы обеспечения безопасности движения). |