Детали машин. РГР 1. 1 Кинематический расчёт привода 5
 Скачать 1.17 Mb. Скачать 1.17 Mb.
|

   Изм. Лист № докум. Подп. Дата   Содержание Задание 3 1 Кинематический расчёт привода 5 1.1 Определение КПД и выбор электродвигателя 5 1.2 Определение передаточных отношений, частот вращения, угловых скоростей и моментов на валах 6 2 Расчёт цилиндрической прямозубой передачи 8 2.1 Выбор материала и определение допускаемых контактных напряжений 8 2.2 Проектных расчёт 8 2.3 Проверочный расчёт 10 3 Расчёт клиноременной передачи 12 4 Предварительный расчёт валов редуктора 16 4.1 Быстроходный вал редуктора 16 4.2 Тихоходный вал редуктора 19 5 Конструктивные размеры шестерни колеса 22 6 Расчёт шпоночных соединений 24 6.1 Шпонки быстроходного вала редуктор 24 6.2 Шпонки тихоходного вала редуктора 25 7 Конструктивные размеры деталей корпуса редуктора 28 8 Эскизная компоновка редуктора 33 Библиографический список 35 Задание Рассчитать элементы механического привода (рисунок 1), состоящего из асинхронного электрического двигателя с короткозамкнутым ротором, открытой ремённой передачи и закрытой передачи – одноступенчатого цилиндрического прямозубого редуктора: 1. Выполнить кинематический расчёт привода (рисунок 1); 2. Выполнить проектный расчёт зубчатой передачи редуктора и произвести проверку выносливости зубьев по контактным напряжениям; 3. Выполнить расчёт открытой передачи; 4. Выполнить предварительный расчёт валов и выбор подшипников; 5. Рассчитать шпоночное соединение, размеры зубчатых колёс и корпусных деталей, произвести эскизную компоновку редуктора; 6. Рассчитать долговечность выбранных в п.4 подшипников. 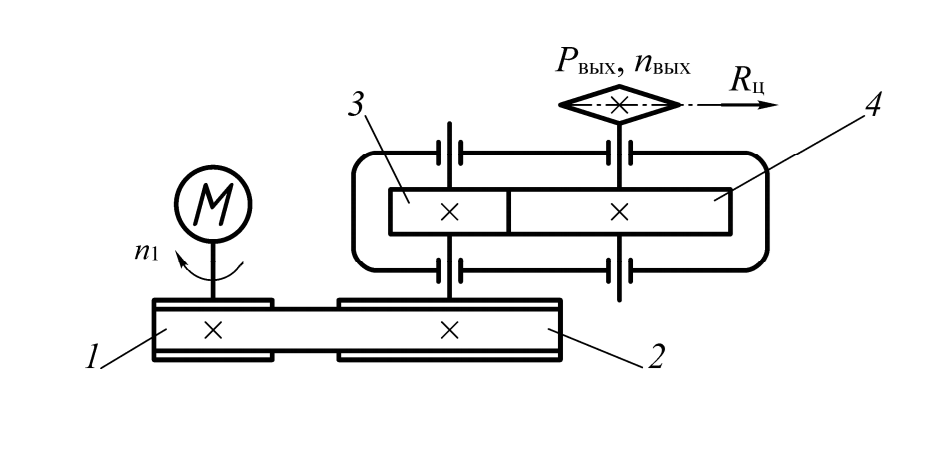 Рисунок 1 Исходные данные Мощность на выходном валу привода Частота вращения выходного вала Нагрузка тихоходного вала Срок службы привода Дополнительные данные Открытая передача клиноременная Материал передачи редуктора сталь 45 Концы валов редуктора по ГОСТ 12081-72 Угол вращения шкивов ремённой передачи Угол наклона нагрузки 1 Кинематический расчёт привода В целях унификации условных обозначений компонентов привода принимаем следующую нумерацию звеньев механических передач (см. рисунок 1): 1 – ведущий шкив (ведущее звено) ремённой передачи; 2 – ведомый шкив (ведомое звено) ремённой передачи; 3 – шестерня (ведущее звено) цилиндрической зубчатой передачи редуктора; 4 – колесо (ведомое звено) цилиндрической зубчатой передачи редуктора; Для обозначения осей вращения валов привода зубчатой передачи принимаем следующую нумерация (в соответствии с принятыми номерами звеньев): 1 – ось вращения вала электродвигателя, она же ось вращения быстроходного вала ремённой передачи, она же ось вращения быстроходного вала всего привода; 3 – ось вращения тихоходного вала ремённой передачи, она же ось вращения ведущего (быстроходного) вала редуктора, она же ось вращения быстроходного вала цилиндрической зубчатой передачи она же ось вращения промежуточного вала привода; 4 – ось вращения тихоходного вала цилиндрической зубчатой передачи, она же ось вращения ведомого (тихоходного) вала редуктора, она же ось вращения тихоходного вала привода. 1.1 Определение КПД и выбор электродвигателя КПД ступеней привода в соответствии с данными таблицы 1.1 [1]: передача ремённая: передача закрытая зубчатая с цилиндрическими колёсами: потери в опорах (из расчёта на одну пару опор): Общий КПД привода: Требуемая мощность двигателя:  (1.5) (1.5)Принимаем эту мощность в качестве расчётной. По приложению ПЗ [1] выбираем электродвигатель серии 4А типоразмера 30L4 с номинальной мощность 2,2 кВт и синхронной частотой вращения магнитного поля статора 1.2 Определение передаточного числа, частоты вращения, угловых скоростей и моментов на валах Частота вращения вала двигателя при номинальной нагрузке: где s – скольжение, Общее передаточное число привода:  (1.8) (1.8)Передаточные числа степеней с учётом требований для передач, входящих в приводы общего назначения ([1], таблица 1.2): в соответствии с ГОСТ 2185–66[2] для передачи зубчатой с цилиндрическими колёсами: для передачи ремённой:  (1.10) (1.10)Частота вращения звеньев 2 и 3:  (1.11) (1.11)Угловые скорости звеньев механических передач: Вращающие моменты на валах:  (1.15) (1.15) (1.16) (1.16) (1.17) (1.17)2 Расчёт цилиндрической прямозубой передачи 2.1 Выбор материала и определение допускаемых контактных напряжений Для заданной стали 45 принимаем термообработку улучшением ([1], таблица 3.3), твёрдость шестерни HB 230, колёса HB 200. Допускаемое контактное напряжение:  (2.1) (2.1)где Для улучшения легированной стали с твердостью менее HB350 ([1], таблица 3.2):  (2.3) (2.3)2.2 Проектный расчёт Межосевое расстояние из условия контактной выносливости поверхности зубьев ([1], (3.7)):  (2.4) (2.4)где где  (2.7) (2.7)По ГОСТ 2185–66 принимаем стандартную величину: Нормальный модуль зацепления: По ГОСТ 9563–60 [3] принимаем стандартную величину: Суммарное число зубьев:  (2.11) (2.11)Число зубьев шестерни:  (2.12) (2.12)Принимаем число зубьев шестерни: Число зубьев колёс: Проверяем межосевое расстояние: Основные размеры шестерни колеса: делительные диаметры: проверяем межосевое расстояние: диаметры вершин зубьев: диаметры впадин зубьев: ширина колеса: согласно требований ГОСТ 2185–66 по ГОСТ 6636–69[3] из ряда Ra20 принимаем ширина шестерни: 2.3 Проверочный расчёт Коэффициент ширины шестерни по диаметру:  (2.26) (2.26)Окружная скорость колеса: По таблице 3.6 [1] назначаем 8-ю степень точности передачи. Уточняем составляющие коэффициента нагрузки ([1] таблицы 3.4–3.6): Уточняем коэффициент нагрузки: Действующие контактные напряжения ([1], (3.5)):  (2.32) (2.32)Условие прочности выполнено. Отклонение действующих контактных напряжений от допускаемых составляет: Такое отклонение входит в допускаемый интервал 15% превышения допускаемых напряжений над действующим. Силы, действующие в зацеплении: окружная:  (2.34) (2.34)реальная: где |