6 основная часть. 1 Описание существующей установки в нашей стране оао Авиадвигатель
 Скачать 3.24 Mb. Скачать 3.24 Mb.
|

 1 Описание существующей установки В нашей стране ОАО «Авиадвигатель» является одним из основных предприятий занимающихся разработкой, проектированием и испытанием газотурбиных двигателей как для воздушного транспорта, так и для наземного оборудования. Очень важным этапом при разработке деталей двигателя является их усталостное изпытание. Этим на территории предприятия занимается отдел статических испытаний, в котором имеется установка для испытания валов вентилятора и турбины низкого давления на малоцикловую усталость (УИВ). Установка УИВ предназначена для испытания валов с целью обоснования их ресурса в соответствии с «Временным положением об установлении и увеличении ресурсов и сроков службы газотурбинных двигателей гражданской авиации, их агрегатов и комплектующих изделий» [1]. Установка должна обеспечивать автономно и комплексно циклическое нагружение испытываемого вала как крутящим моментом силы, так и осевой силой в соответствии с формой цикла, приведенной на рисунке 1 [1].  t Рисунок 1 – Форма цикла нагружения вала t1 – время нагружения; t2 – время выдержки под нагрузкой (на максимальном режиме); t3 – время разгружения; t0 – время выдержки между циклами нагружения. Основные параметры и характеристики установки [1, 2]: диапазон воспроизведения крутящего момента силы: …… от 0 до 1,8·105 Нм; допускаемое отклонение крутящего момента силы от воспроизводимого значения:……………………………………………………… не более 2 %; диапазон воспроизведения осевой силы: …………………. от 0 до 2·105 Н; допускаемое отклонение осевой силы от воспроизводимого значения:… …………………………………………………………………не более 2 %; максимальная длина испытываемого вала:………………… 2000 мм; максимальный диаметр испытываемого вала: ……………. 350 мм; максимальный угол закрутки испытываемого вала:………. 18°; масса установки: …………………………………………….. 3400 кг; средний срок службы установки:…………………………… 10 лет; температура окружающего воздуха:……………………….. 20 5 °С; относительная влажность:………………………………….. 60 20 %. Установка УИВ состот из силовой системы, гидравлической системы, системы управления и измерения. Силовая система должна обеспечивать испытания при воздействии на них силовых нагрузок, близких к эксплуатационным; Гидравлическая система должна обеспечивать плавность нагружения до заданного значения и разгрузки в цикле работы. Система управления и измерения должна обеспечить работу установки в автоматическом режиме по заданной программе нагружения, должна иметь каналы управления, контроля и измерения параметров установки. Схема гидравлической системы представлена на рисунке 2 [2]. Гидравлическая система установки состоит из [2]: 1. Бак, 2. Вентиль 992АТ-5, 3. Насос 623К, 4. Клапан редукционный ГА186М, 5. Клапан обратный 671700/Б, 6. Фильтр ФГ11СН, 7. Вентиль992АТ-2, 8. Кран 2-х позиционный с эл.магнитным управлением ГА 165/1, 9. Манометр МТИ 250, 10. Гидроцилиндр П9-1115-002, 11. Гидроцилиндр ХГ-35, 12. Насос Н-401Е.  Рисунок 2 – Схема гидравлической системы УИВ Порядок работы гидросистемы [2]: 1. Проверить открытие вентилей 2, 7(1), 7(14), 7(3), 7(4), 7(5), 7(8), 7(9), 7(10), 7(11), закрытие вентилей 7(2), 7(6), 7(7). 2. Включить насосы подачи масла к гидроцилиндрам 12. 3. Используя градуировочные графики, установить по манометрам 9(2), 9(4), 9(5) при помощи вентилей 7(1), 7(9) величины давлений в зависимости от заданных крутящего момента Мкр и осевой силы Q. 4. При помощи вентилей 7(4), 7(5) и с помощью секундомера установить необходимые величины времени нагружения 1 и времени разгрузки 3 (с). 5. В процессе проведения испытаний следить за показаниями манометров. 6. При резком падении давления масла выключить насос. 7. По окончании испытаний снять давление в гидроцилиндрах, выключить насосы. 8. Результаты испытаний через 500-1000 циклов заносить в журнал, в котором должны быть указаны: число циклов нагружения вала, давление в гидроцилиндрах, угол закрутки вала. 2 Разработка проекта модернизации 2.1 Назначение модернизации На сегодняшний момент технологическое оборудование установки морально устарело и не отвечает современным требованиям. Гидроцилиндры, используемые для создания крутящего момента силы и осевой силы, имеют невысокие КПД и точность. Модернизация заключается в замене гидроцилиндров ХГ-35 и П9-1115-002 (2 штуки) на электроцилиндры FT-80-1206, приводимые в движение электродвигателем (серводвигателем), вращением ротора которого управляет преобразователь частоты Sigma-IISGDH-3ZDEфирмыOmron. Управление преобразователем частоты осуществляется процессорным модулем BeckhoffCX 5020-0111, формирующим управляющие сигналы для частотных преобразователей в соответствии с программой испытаний и текущими значениями нагружения. Для измерения крутящего момента силы и осевой силы используется S-образные тензодатчики С2 фирмы Тензо-М. Управление процессом нагружения осуществляется через ПЭВМ, программно и с участием оператора, управляющего испытанием. Внедрение данного оборудования позволяет повысить точность испытания, контролировать параметры нагружения в процессе испытания, автоматически задавать параметры цикловой нагрузки для испытания, упрощает обслуживание стенда, автоматически записывает параметры, повышает надежность оборудования, улучшает условия труда персоонала. 2.2 Выбор оборудования 2.2.1 Выбор электроцилиндра При замене гидроцилиндров ХГ-35 и П9-1115-002 на электроцилиндры необходимо учитывать следующие требования [1]: диапазон воспроизведения крутящего момента силы: …….от 0 до 1,8·105 Нм; допускаемое отклонение крутящего момента силы от воспроизводимого значения:……………………………………………………… не более 2 %; диапазон воспроизведения осевой силы:…………………… от 0 до 2·105 Н; допускаемое отклонение осевой силы от воспроизводимого значения:….……………………не более 2 %; температура окружающего воздуха:…………………. ……. 20 5 °С; относительная влажность:…………………………………… 60 20 %. Данным требованиям соответствует электроцилиндр FT-80-1206 фирмы Exlar. Электроцилиндры серии FT предназначены для позиционирования штока и удержания нагрузки в требуемом положении. Конструктивно, приводы серии FT состоят из ролико-винтовой передачи (рисунок 3) в корпусе, с выдвигающимся поступательно гладким штоком и пристыкованным параллельно (через ременную передачу) или последовательно электродвигателем. В качестве электродвигателя используется серводвигатель с датчиком обратной связи (рисунок 5). 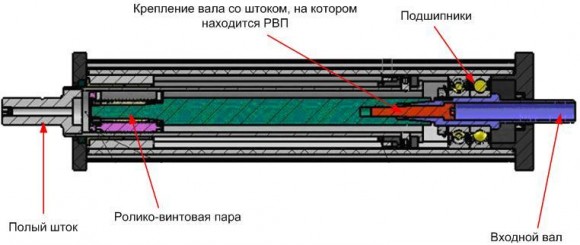 Рисунок 3 – Ролико-винтовая передача привода FT 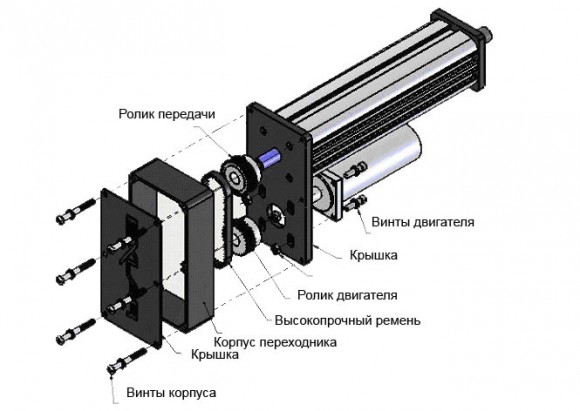 Рисунок 4 – Общий вид электроцилиндра Современные серводвигатели выполняются на базе синхронных машин с возбуждением от постоянных магнитов, расположенных на роторе [3]. 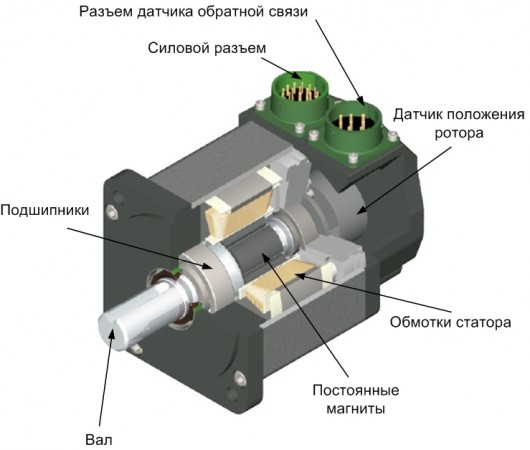 Рисунок 5 – Серводвигатель Серводвигатель сформирован трехфазной обмоткой на статоре. На ротор наклеены постоянные магниты. С торца ротора закреплен датчик положения ротора [3]. Питание трехфазной обмотки статора осуществляется от преобразователя частоты. Токи, протекающие по обмоткам, создают магнитное поле, вращающееся синхронно с полем ротора. Достоинства: отсутствие щеточного контакта, малый момент инерции ротора, простая схема охлаждения (на роторе нет нагреваемых током нагрузки обмоток), высокий КПД (отсутствие потерь на возбуждение), встроенный датчик (скорости и положения). Сочетание высокой статической точности и большого диапазона регулирования скорости могут оказаться решающими аргументами в пользу выбора серводвигателя. Для слежения за перемещением штока используется вращательный датчик, установленный на вал электродвигателя. Пересчет вращательного перемещения к линейному, через редуктор двигателя и шаг передачи РВП, происходит в частотном преобразователе. Характеристики электроцилиндра FT-80-1206 с серводвигателем [3]: Максимальное усилие……………………………………….. 260000 Н; Максимальный ход штока…………………………………... 305 мм; Шаг винта…………………………………………………….. 6 мм; Максимальная скорость штока……………………………… 15 мм/с; Напряжение питания………………………………………… 380 В; Номинальная выходная мощность …………………………. 30 кВт; Номинальная скорость ротора………………………………. 1200об/мин; Максимальная скорость ротора……………………………... 2000 об/мин; Момент инерции ротора……………………………………... 0,0773 кг·м2; Номинальный ток……………………………………………. 80 А; Кратковременный максимальный ток……………………… 170 А; Номинальный крутящий момент……………………………. 191 Н·м; Кратковременный пиковый вращающий момент…………. 382 Н·м. Энкодер абсолютный: 17-и разрядный (16384 имп/оборот). 2.2.2 Выбор преобразователя частоты Для управления серводвигателем необходим частотный преобразователь. Наиболее подходящим для используемого двигателя является преобразователь частоты (сервопривод)Sigma-IISGDH-3ZDE фирмы Omron. Характеристики преобразователя частоты [4]: Максимально допустимая мощность двигателя…….. 30 кВт Продолжительный выходной ток…………………….. 80 А Максимальный выходной ток………………………… 170 А Входное напряжение питания силовой цепи………... 380-480 В Входное напряжение питание цепи управления….… 24 В Температура эксплуатации…………………………… от 0 до +55ºС Влажность при эксплуатации…………..не более 90% (без конденсации) Преобразователь частоты имеет следующие методы управления [4]: - трехфазный двухполупериодный выпрямитель; - БТИЗ - биполярный транзистор с изолированным затвором; - ШИМ - широтно-импульсная модуляция; - синусоидальный ток. Конструкция сервоприводов серии Sigma II исключает компромиссы между качеством, надежностью или функциональностью. Отличаясь повышенной компактностью, все модели сервоприводов Sigma II снабжены импульсными и аналоговыми входами и поддерживают функцию автоматической настройки. Дополнительные сменные платы расширяют функциональные возможности сервоприводов, позволяя реализовать управление шаговыми или комплексными перемещениями в системах с кулачковой или зубчатой передачей и в системах со связанными осями. Основные достоинства [4]: • Трехкратное превышение пикового значения тока над номинальным в течение 3 секунд; • Автоматическое распознавание двигателя функцией автоматической настройки; • Аналоговые и импульсные входы для управления скоростью, крутящим моментом и положением; • Дополнительные модули связи для промышленных сетей, для сети MECHATROLINK-II, сервоприводы, а также модули контроллеров многоосного управления и модули шагового перемещения; • Функция протоколирования с возможностью построения осциллограмм. 2.2.3 Выбор процессорного модуля Управление преобразователем частоты осуществляется процессорным модулем BeckhoffCX 5020-0111, формирующий управляющие сигналы для частотных преобразователей в соответствии с программой испытаний и текущими значениями нагружения. Технические данные процессорного модуля [5]: Процессор……………………IntelAtomZ530, с тактовой частотой 1,6 ГГц; Операционная система……... Windows CE или Windows Embedded Standard; ОЗУ………………………………………………. 512 Мбайт; Максимальное потребление мощности ………. 12,5 Вт; Температура эксплуатации…………………….. от -25 до +60 ºС; Относительная влажность……………………… 95 %, без конденсации; Питание …………………………………………. 24 В постоянного тока; Электропитание модулей ввода-вывода………. 2 А; Процессорный модуль Beckhoff CX5020-0111 предназначен для получения от управляющей ПЭВМ информации о заданных параметрах нагружения объекта испытаний; передачи информации о требуемых усилиях нагружения на частотные преобразователи Omron, управляющие электроцилиндрами нагружения; сбора, обработки и передачи на частотные преобразователи информации о текущих значениях параметров нагружения объекта испытаний, поступающих с модулей Beckhoff EL3356. Процессорный модуль Beckhoff CX5020-0111 механически и электрически (по цепям питания и сбора измерительной информации) сопрягается с модулями Beckhoff EL3356 и обеспечивает обработку информации всех измерительных модулей. 2.2.4 Выбор измерительного модуля ввода/вывода Модули Beckhoff EL3356 предназначены для измерения напряжений, поступающих с тензорезисторных датчиков силы и передачи измерительной информации о текущих значениях параметров нагружения объекта испытаний в процессорный модуль Beckhoff CX5020-0111. Технические характеристики модуля Beckhoff EL3356 приведены в Таблица 1 [5]. Таблица 1 Основные технические характеристики модуля Beckhoff EL3356
Особенностью модулей Beckhoff EL3356 является наличие функции автокалибровки, которая производится при подаче напряжения питания. Конструктивно модуль Beckhoff EL3356 выполнен в неразборном пластмассовом корпусе (рисунок 6). С помощью пазов в левой верхней и нижней сторон корпуса и выступов в правой верхней и нижней стороне корпуса модули могут механически фиксироваться, присоединяться к процессорному модулю Beckhoff CX5020-0111 и между собой. При этом производится объединение модулей по шинам питания модулей, питания датчиков, съема измерительной информации.  Рисунок 6 – Вид модуля Beckhoff EL3356 Подключение измерительных датчиков к модулю Модуля Beckhoff EL3356 производится проводами, идущими от датчика путем их фиксации в подпружиненных контактах на лицевой панели модуля. Расположение входных подпружиненных контактов и схема подключаемого к модулю Beckhoff EL3356 тензометрического датчика показаны на Рисунок 7.  Рисунок 7 -Схема подключения мостового датчика к модулю Beckhoff EL3356 2.2.5 Выбор датчики измерения нагрузки Для измерения крутящего момента силы и осевой силы используется S-образные тензодатчики С2 фирмы Тензо-М ( рисунок 8).  Рисунок 8 – Внешний вид S-образного тензодатчикана С2 Технические характеристики [6]: Наибольший предел измерения………………………. 20 тонн Число поверочных интервалов……………………….. 3000 Рабочий коэффициент передачи……………………… 1,5 ±0,0015 мВ/В Наибольшее напряжение питания…………………… 12 В Сопротивление входное………………………………. 380 ± 15 Ом Сопротивление выходное…………………………….. 350 ± 1 Ом Сопротивление изоляции………………………………более 5 ГОм Материал датчика……………………………………... легированная сталь Схеме подключения…………………………………… четырехпроводная Длина кабеля……………………………………………от 2м до 100м 2.3 Принцип работы Параметры нагружения вводятся в ПО «Нагружение», установленное в управляющую ПЭВМ, которая размещена в операторной. Информация о величине усилий, которые должен создать каждый из электроцилиндров по сети Ethernet передаются в процессорный модуль Beckhoff CX5020-0111. Процессорный модуль передает команды управления электроцилиндрами в частотные преобразователи Omron. Каждый частотный преобразователь формирует питающее напряжение для подключенного к нему электроцилиндра. При нагружении изделия на тензорезистивных S-образных датчиках сжатия-растяжения, установленных между штоком электроцилиндра и изделием, возникает напряжение пропорциональное приложенному усилию. Сигналы с S-образных датчиков поступают на входы модулей ввода/вывода Beckhoff EL3356, обрабатываются и передаются в процессорный модуль Beckhoff CX5020-0111 и в частотные преобразователи. Информация о реальной величине усилий на штоках электроцилиндров, используемая в цепи обратной связи в системе нагружения установки, позволяет обеспечить высокую точность нагружения. Функциональная схема установки представлена на рисунке 9.  Рисунок 9 – Функциональная схема установки 3 Разработка системы автоматического регулирования 3.1 Проектирование функциональной схемы САР нагружения Функциональная схема САР нагружения представлена на рисунке 10.  Рисунок 10 – Функциональная схема САР нагружения Рисунок 10 – Функциональная схема САР нагруженияОбозначения на схеме: Nвх – код заданной величины нагружения; Nос– код фактической величины нагружения, код обратной связи; ∆N – код рассогласования; Nупр – код задания частоты на преобразователь частоты; Fпч – частота питающего напряжения двигателя; P – величина нагружения (крутящий момент силы и осевая сила). Пусть из модуля задания программ управления ПЭВМ поступила команда Nвх в цифровое сравнивающее устройство процессорного модуля на отработку перемещения за пределы исходного положения штока электроцилиндра (ЭЦ). В сравнивающем устройстве формируется сигнал ∆N равный разности входного сигнала и сигнала с S-образного тензодатчика, который поступает в центральный процессор, где формируется сигнал управления Nупр. При изменении положения штока ЭЦ, на котором установлен S-образный тензодатчик, увеличивается нагрузка (крутящий момент силы и осевая сила). S-образный тензодатчик, подключенный к модулю ввода/вывода, измеряет данное нагружение и на выходе модуля ввода-вывода образуется сигнал NДС, который поступает в цифровое сравнирающее устройство процессорного модуля. Чем ближе нагрузка на штоке ЭЦ будет приближена к заданному значению, тем меньше будет величина сигнала управления в процессорном модуле. 3.2 Определение параметров функциональной схемы 3.2.1 Шток электроцилинра. Передаточная функция штока электроцилиндра: Передаточный коэффициент штока: где lШТ. –максимальный ход штока электроцилиндра [мм]; P – максимальное усилие электроцилиндра [тонн]. Согласно формуле (1.1): Kшт =26/305=0,085 тонн/мм. WШТ(p)= 0,085 3.2.2 Редуктор Передаточная функция редуктора: Передаточный коэффициент редуктора: где N –шаг пары винт-гайка [мм]; Согласно формуле (2.1): KР =6/(2×3,14156) = 0,955 мм/рад. 3.2.3 Серводвигатель Расчет параметров двигателя [7, 8]: количество пар полюсов: рn=2; угловая скорость электромагнитного поля статора: максимальный момент развиваемый двигателем:……………..…Mmax=382 Нм; номинальная частота напряжения питания двигателя:…………...fnom=50 Гц; номинальная скорость вращения ротора двигателя:………. Nnom=1200 об/мин; номинальный момент развиваемый двигателем:………... Mnom=191220,3 Нм; масса платформы:……………………………………………… m=20000кг; шаг пары винт-гайка:…………………………………………... h=6 мм; момент инерции ротора двигателя: ……………………………Jd=0.0773 кг×м2; линейная скорость перемещения штока:……………………... Vn=15 мм/с; технологическая скорость двигателя: Ndt=0.7×Nnom=0,7×1200=840 об/мин; (3.2) передаточный коэффициент двигателя по каналу управления: Kd=2×π/pn = 2×3,1416/2=3,1416 рад/с/Гц; (3.3) номинальная угловая скорость вращения вала двигателя: wnom=Nnom×2× π /60=1200×2×3,1416/60=125,6637 рад/с; (3.4) величина номинального скольжения: sn=(w0-wnom)/w0 =(157-125,6637) /157=0,1996; (3.5) перегрузочная способность двигателя: λ=Mmax/Mnom=382/191=2; (3.6) величина критического скольжения: жёсткость механической характеристики двигателя: β=Mmax/(sk×wо эл.ном.)=382/(0,7449×157)=3,2664 (3.8) передаточный коэффициент двигателя по возмущению (моменту): Kf=1/β=1/3,2664=0,3061 рад/с/Нм; (3.9) момент инерции платформы, приведенный к выходному валу редуктора: Jn=2.5*10-8*m*h2 =0,018 кг*м2; (3.10) передаточный коэффициент редуктора: Kr=Vn×60/ h/ Ndt=15×60/6/840=0,1786 ; (3.11) момент инерции на валу двигателя: J=Jd+Jdc+Kr2×Jn+Jrpr = 0,0773+0+(0,1786)2×0,018+0=0,0779 кг×м2; (3.12) электромеханическая постоянная времени двигателя: Tm=J/β= 0,0779/3,2664=0,0237 с; (3.13) электромагнитная постоянная времени двигателя: Te=1/( wо эл.ном. ×Sk)=1/(157×0,7449)=0,0085 с; (3.14) коэффициент затухания колебательного звена: Согласно формуле (3.15) значение величины E больше 1, поэтому звено представимо двумя апериодическими звеньями 1-го порядка: постоянная времени первого апериодического звена: постоянная времени второго апериодического звена: Td2=Tm-Td1= 0,0039 с. (3.17) Для исследования системы более удобна модель двигателя при  Рисунок 11– Модель двигателя 3.2.4 Преобразователь частоты Частотный преобразователь в практике проектирования принято интерпретировать инерционным звеном первого порядка [8]:  , ,где  , (4.1) , (4.1)где (Тф =0,003-0,005 с); Передаточный коэффициент преобразователя частоты найдем из выражения: Передаточная функция преобразователя частоты: 3.2.5 Цифро-аналоговый преобразователь Цифро-аналоговый преобразователь является блоком, входящим в преобразователь частоты. где Uп – опорное напряжение преобразователя, В; N1 - ёмкость входного регистра преобразователя, ед.кода. N1=2n-1=212-1=4095 ед.кода; (5.2) где n – разрядность ЦАП. Структурная схема ЦАП представлена на рисунке 12. 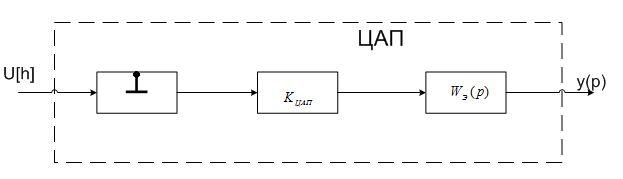 Рисунок 12 – Структурная схема цифро-аналогового преобразователя Рисунок 12 – Структурная схема цифро-аналогового преобразователя 3.2.6 S-образный тензодатчик Передаточная функция S-образного тензодатчика: где TДС=13,9 мкс= 0,0000139 с- постоянная времени датчика kдос=0,075(мВ/тонн)  Рисунок 13 – Структурная схема S-образного тензодатчика 3.2.7 Аналого-цифровой преобразователь модуля ввода/вывода где Uизм =25 мВ – диапазон измерения напряжения, N1 - ёмкость входного регистра преобразователя, ед.кода. Согласно формуле (5.2): N1=2n-1=216-1=65535 ед.кода; где n =16– разрядность АЦП. 3.3 Построение структурной схемы САР На основании построенной функциональной схемы, выбранных звеньев и расчета их параметров строится структурная схема. Она представляет математическую модель системы (рисунок 14).  Рисунок 14 – Структурная схема САР нагружения Элементы схемы: 3.4 Синтез системы автоматического регулирования 3.4.1 Расчет номинального установившегося режима работы контура регулирования нагружения  Рисунок 15 – Расчётная структурная схема контура нагружения САР В результате анализа работы системы рассчитываются значения номинального входного воздействия r и максимального возмущения mC.[7, 8, 9, 10] Пусть задана Передаточная функция замкнутой системы по каналу управления:  Статический передаточный коэффициент по каналу управления определяется выражением:  Передаточная функция замкнутой системы по каналу возмущения:  Статический передаточный коэффициент по каналу возмущения определяется выражением:  Составим систему уравнений по каналу управления и возмущения:  (3) (3)где r– номинальное входное воздействие, ед. кода; mc – максимальное значение возмущающего момента двигателя (для исследуемой системы принимается 0,2*Мном.дв(Нм): После подстановки выражений  (4) (4)Введём переменные: где Тогда статический передаточный коэффициент по каналу возмущения определяется так: а формула расчета передаточного коэффициента регулятора имеет вид: Передаточный коэффициент разомкнутой системы: Передаточный коэффициент программы коррекции: где kцап - передаточный коэффициент цифро-аналогового преобразователя. Численное значение ординаты низкочастотной асимптоты ЛАЧХ разомкнутой системы: Статический передаточный коэффициент по каналу управления: Номинальное входное воздействие: 3.4.2 Синтез САР по каналу управления Анализ устойчивости систем удобнее всего проводить посредством моделирования проектируемой системы в среде Simulink программного пакета MATLAB. Изображение предварительной линейной модели САР без регулятора приведено на рисунке 16. Как видно, модель Simulink визуально мало отличается от структурных схем, построенных в соответствии с общепринятыми в ТАУ обозначениями. 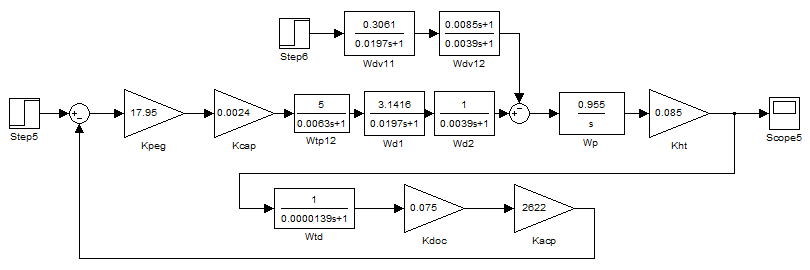 Рисунок 16 – Линейная модель САР нагружения штока ЭЦ Промоделировав данную систему автоматического регулирования, получили переходную характеристику системы без регулятора (рисунок 17). Показатели качества данной системы: Время перходного процесса tn.n=0,2635c, Перерегулирование Ошибка в установившемся режиме: В данной системе качественные показатели переходного процесса по каналу управления удовлетворяют заданным условиям. 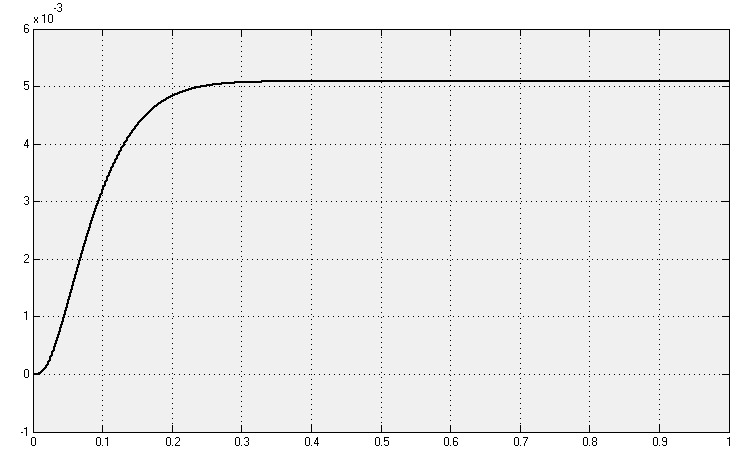 Рисунок 17–Переходная характеристика системы по каналу управления 3.4.3 Динамический синтез САР Для того, чтобы реализовать проектируемую схему, необходимо задаться таким законом регулирования, при котором статические и динамические показатели точности регулирования соответствовали технологическим нормам исследуемого объекта. В зависимости от типа и порядка объектов, а также соотношений между их постоянными времени, настройка контура регулирования осуществляется либо по критерию МО (модульный оптимум), либо по критерию СО (симметричный оптимум) [9]. Таблица 2 Гарантирующие настроечные параметры типовых регуляторов
Исходя из условий передаточной функции: Т02=0,0197˂˂ Т01=0,0039. Настроечные параметры регуляторов: k0=krs=kрег kцап kтп kд kр kшт kдос kацп=10,8022 – согласно формулы (9). KP’=1 /2k0 Т01=1/2 10,8022 0,0197=2,3496 TИ’=4Т01=4 0,0039=0,0788 Передаточная функция ПИ-регулятора имеет вид [9]: Или  Коэффициенты ПИ-регулятора будут следующие: KП=KP’ (TИ’)/ TИ’=KP’=2,3496; KИ=KP’/TИ’=2,3496/0,0788=29,817. Промоделируем полученную САР с регулятором: 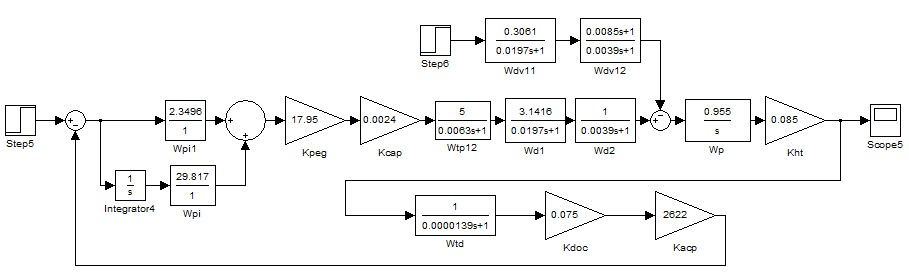 Рисунок 18 – Линейная модель САР с ПИ-регулятором 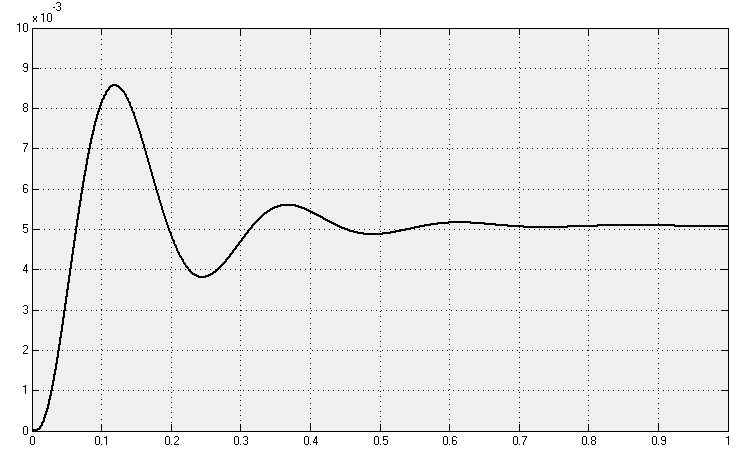 Рисунок 19–Переходная характеристика системы по каналу управления 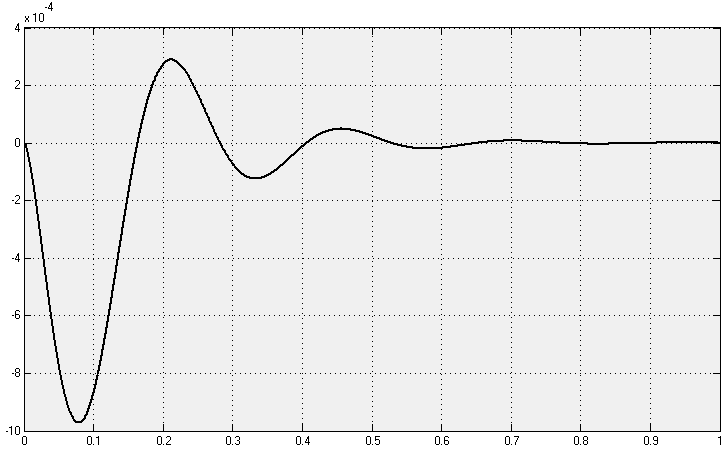 Рисунок 20 – Переходная характеристика системы по каналу возмущения Получили большое перерегулирование переходного процесса, для его уменьшения необходимо рассчитать параметры предшествующего фильтра. Передаточная функция предшествующего фильтра: где Проведем анализ САР с регулятором и предшествующим фильтром. Модель САР с регулятором и предшествующим фильтром изображена на рисунке 21. 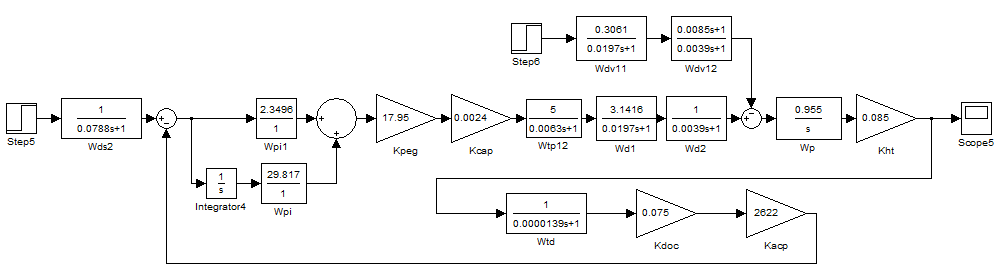 Рисунок 21 – Модель САР с регулятором и предшествующим фильтром Получены переходные характеристики по каналам управления (рисунок 22) и возмущения (рисунок 23). 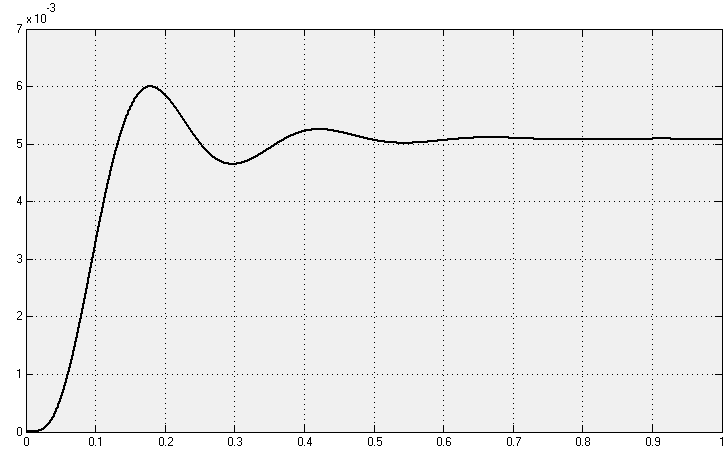 Рисунок 22–Переходная характеристика системы по каналу управления Рисунок 23 – Переходная характеристика системы по каналу возмущения Показатели качества данной системы: Время перходного процесса t n.n=0,574c Перерегулирование Ошибка в установившемся режиме Полученные характеристики системы и её показатели качества удовлетворяют заданым условиям. | |||||||||||||||||||||||||||||||||||||||||||||||