|
|
1. Определение и физические основы радиолокации 2
Шкала дальности формируется электронным способом. Следующим образом: в устройстве формирования меток в каждом периоде формируется три видеоимпульса.
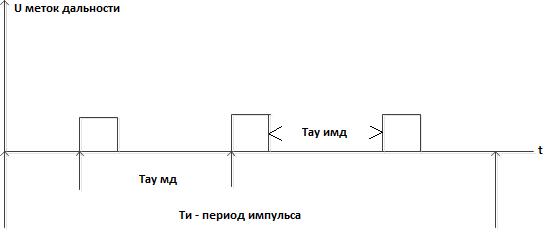
Эти видеоимпульсы подаются либо на катод ( – полярности) либо на управляющий электрод (+ полярности).

Если антенна неподвижна:
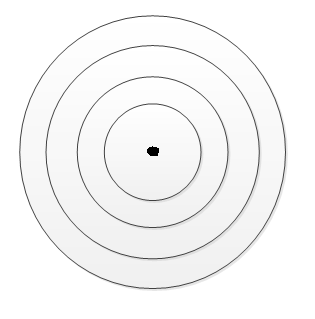
Если антенна вращается: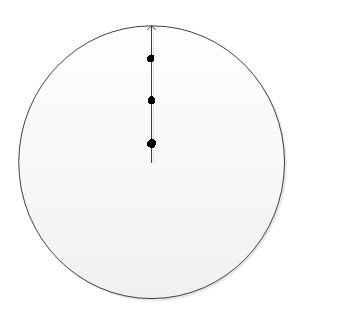
Способ формирования электронной шкалы азимута на экране индикатора
Формирование осуществляется подмешиванием в основной сигнал сигнала метки.
В УФМ на определенных углах поворота антенны (определяются с помощью датчиков угла поворота) формируется сигнал, засвечивающий весь радиус экрана.
Таким образом, на экране на определённых значениях α формируются шкалы азимута.
0
t
Uмa
Ip(t)
t
0
αма
33.Основные характеристики индикатора кругового обзора
a)Характеристики экрана(геометрические характеристики)
Rэкр и dп-диаметр светового пятна на экране индикатора, образуемого фокусированным электронным лучом. Это рисующий(изображающий) элемент который определяет разрешаюшую способность ЭЛТ.
б)Характеристики индикатора
Мα и Мд
Δαиндикатора= dп* Мα
ΔДинд=dп* Мд
Это значит, что индикатор ухудшает разрешающую потенциальную способность по радиусу
δ αрл= δ αпотенц + δ αинд
δ Дрл= δ Дпотенц + δ Динд
34.Среднеквадратические погрешности отсчета координат целей по шкалам индикатора
На основании экспериментальной статистики выявлено, что среднеквадратическая ошибка отсчёта координаты по шкале индикатора ≈
σр=(0,1…0,5) Δрдел
Δрдел – цена деления шкалы этого параметра
Exp: a) Δlдел=10мм=1см; σр=0,1* Δрдел
a) Δlдел=1мм; σр=0,5* Δрдел
Значит, погрешность отсчёта по шкалам тем меньше, чем меньше цена одного деления шкалы, т.е. для повышения точности отсчёта необходимо от шкал с большими ценами деления переходить к шкалам с малой ценой деления переходить к шкалам с малой ценой деления.
На экране формируются дополнительные обозначения (метки), помогающие при отсчете оператору.
Отчет по шкалам устройства формирования меток
В этом случае на экране индикаторы формируются 2 измерительные метки
В устройстве формируется шкала азимута и дальности с малой ценой деления и ручки (МД МА-метки дальности и азимута)С помощью МА метку азимута вращать влево вправо .с помощью МД увеличивать уменьшать радиус
Метки азимута
Отсчет коорд отметки цели осуществляется в момент наложения обеих меток на отметку цели в этот момент и делается отсчет по указанным шкалам
Шк α
Шк Д
(с крышечкой)α(у)=α(МД) (с крышечкой)Д=Д(мд)
α(МД)-угол поворота
Д(мд)-дальность на которую устанавливается при повороте ручки
36.Способы формирования меток дальности и азимута на экране индикатора
Формирование метки азимута осуществляется с помощью датчиков угла поворота антенны. Это при формировании электронной шкалы азимута
Формирование подвижной метки азимута осуществляется след образом
Ip(t)
Пилообразный ток
t
αA=WA*t
U(MA)
α(A)=WA*t
t
α(MA)
C помощью ручки МА видеоимпульс смещается влево или вправо
Либо + на управ электрод либо минус на катод
Увеличивает светимость радиуса на котором находится
Формирование метки дальности
Также как и шкала Д только с помощью 1 видеоимпульса
U(MД)
t
t(0)
t(0)
Указанным способом на экране индикатора формируются различные доп метки помогающие оператору
37.Цифровой метод отсчета дальности до цели
Принципе действия метода поясняется следующим рисунком
МД
Ду
OY
Тау(и)счета
Конеч.Число имп
N(имп)
(С крышкой)N(имп)
Цифровой Индикатор
ГСИ
СчетчикИмпульсов
Ключ
t0+Тау(мд)
t0
(с Крышкой)Ду=(С крышкой)Nи*ТАУи счета(с/2)
ΔДдел=(с/2)ТАУисч
ТАУмд= (С крышкой)Nи*ТАУи счета
Цена деления 10-20мм
Счетчик импульсов содержит преобразователь импульсов двоичного кода в десятичный код
38.Цифровой метод отсчета азимута цели
Блок фото элементов
Щелевой ист света
Цифровой индикатор
от оси антенны
N(имп) кода грея
Датчик углового кода
ось от ручки метки азим
В каждый сектор закодирован кодом грея
Новому сектору свой код
Код грея- это модифицированный двоичный код приспособленный для вращательного движения
Δ(с крышкой)αу=Nсот
ОУ
Цена равна 1 делению
Точн антенна опред ценой деления
ΔL(дел)=2πr/3600секций
Применине специальной оптики чтобы увеличить размер деления
39.Отличительные признаки радиолокационных сигналов движущихся целей, обеспечивающие их селекцию на фоне пассивных помех
Чтобы выделить полезный сигнал от движущейся цели на фоне сигналов от неподвижных объектов ЗП и облака используют отличия в частотах этих сигналов
Надо получить сигнал с доплеровской частотой Fd и далее выполнить операцию обнаружения и измерения по этому сигналу
Полезный сигнал с доплеровской частотой обычно получается след образом
Sфд(t)
Sприем
ФД
Fд
f(0)-f(D)
fопоры
Sкг(t)
В составе ФД имеется полосовой фильтр настроенный разную частоту
1)Для неискаженного доплеровского сигнала требуется частота повтора
2)На выходе приемника полезный сигнал должен быть когерентной имп последовательности
Согласно теореме Котельникова истинная доплеровская частота передается неискаженно только в пределах 0…. fi/2
40.Структурная схема и принцип действия СДЦ как обнаружителя - измерителя частоты радиолокационного сигнала
СДЦ-селектор движущихся целей
Предназначен для выделения сигналов от движущихся целей на фоне пассивных помех
Под СДЦ понимают выделение сигналов движущихся целей из них смеси с помехами _и шумами, принимаемой приемником _РЛС. Типичными _задачами _СДЦ _являются: обнаружение _самолетов на фоне _отражений _от _местных _предметов, облаков естественного _и _искусственного _происхождения _(для _наземной _РЛС); обнаружение низколетящих _целей _с _самолета _или _спутника _на _фоне _отражений _от _поверхности Земли _(для _бортовой _РЛС); обнаружение _наземных _транспортных _средств _на _фоне отражений _от _неподвижных _предметов _и _дороги _(для _автомобильной _РЛС).
Поскольку _мощность _отражений _от _неподвижных _в _малоподвижных _объектов (мощность _пассивных _помех), как _правило, на _20÷80 дБ _и _более _превышает мощность _сигналов _движущихся _целей, то _при _условии _их _одновременного _приема решить _задачу _СДЦ _удается _лишь _при _существенных _различиях _спектров _сигналов и _помех. Основой _для _различения сигналов _движущихся _и _неподвижных _объектов является _доплеровское _смещение частоты несущего колебания _при _отражении радиосигнала от приближающейся или удаляющейся по отношению _к _РЛС _цели:
Fd=2*Vr/c f0=2Vr/ λ, (1)
где _V - радиальная _скорость _цели _относительно _РЛС; - несущая _частота; λ _- длина _волны _РЛС; с _- скорость _распространения _радиоволны.
41.Структурная схема и принцип действия СДЦ с НЧПИ
видеоимпульсы
д.c.
Sупч
ФО
ДО
ДО
ДФ
КГ
ВЧ
д.c.
д.c.
имп
непр
непр
огиб
индик
К
Пропорционально динамики направ ант
ΔFдф=Eп/2 ДО-детектор огибающей ВЧ-видеоусилитель 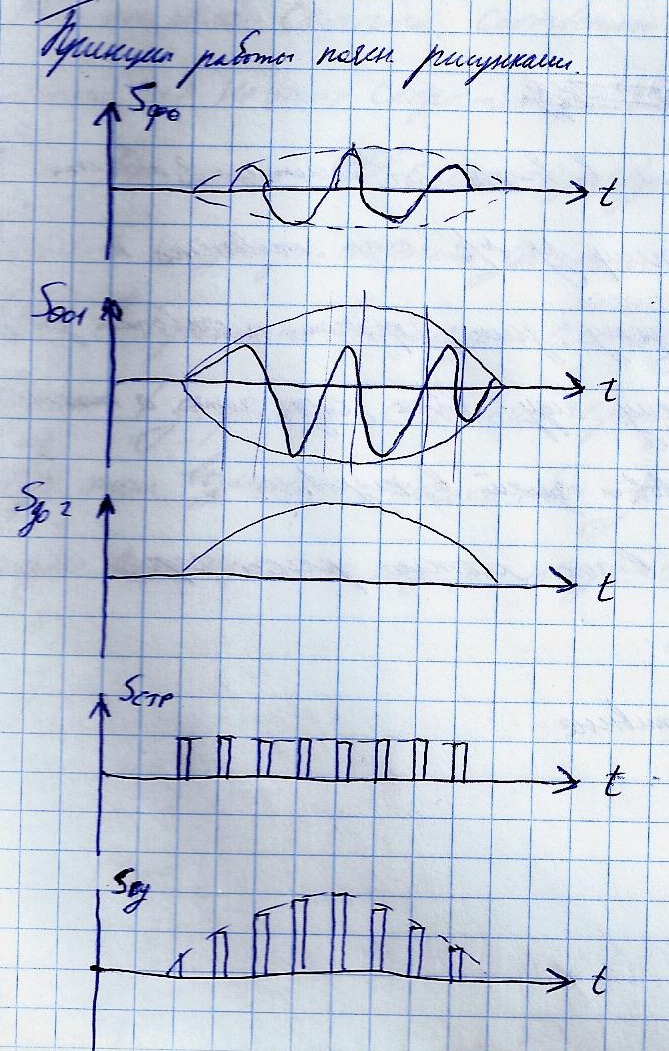
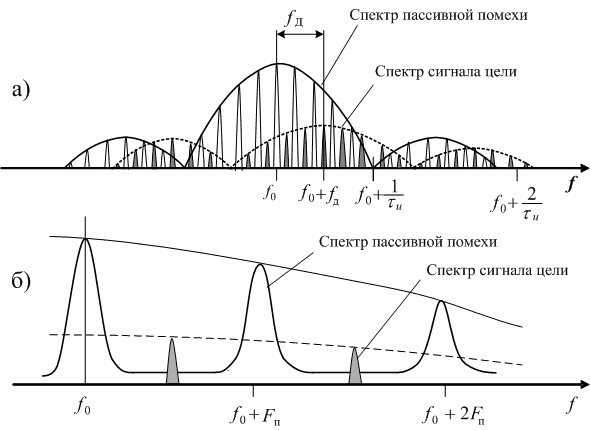
На _рис. 1а, представлен _общий _вид _спектров _пассивной _помехи _и _сигнала, отраженного _движущейся _целью _для _когерентной _импульсной _РЛС _с _низкой _частотой _повторения _зондирующих _импульсов _. На _рис. 1б, изображен _фрагмент _этого _спектра.
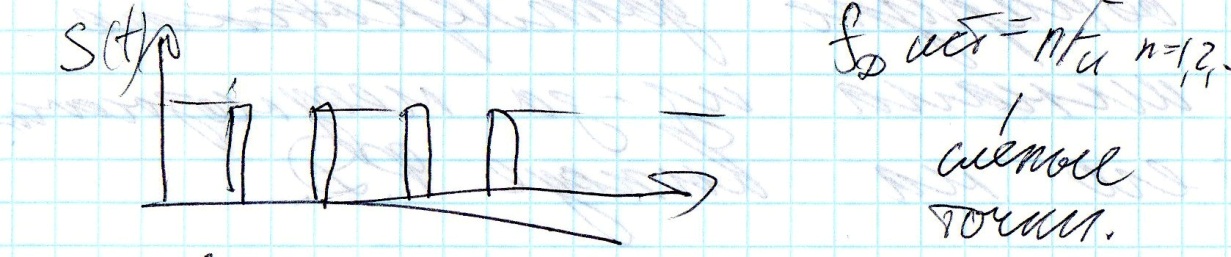
42. «слепые» скорости при НЧПИ и способы их устранения

Сигнал доплеровской частоты на выходе ФД выделяется неоднозначно.
Кроме этого на выходе ФД могут быть случаи, когда его сигнал имеет 0АМ.
43.структурная схема и принцип действия СДЦ с ЧПК пассивных помех
СДЦ предназначен для выделения сигналов от движущихся целей на фоне пассивных помех.
Возникновение пассивных помех поясняется следующим рисунком.
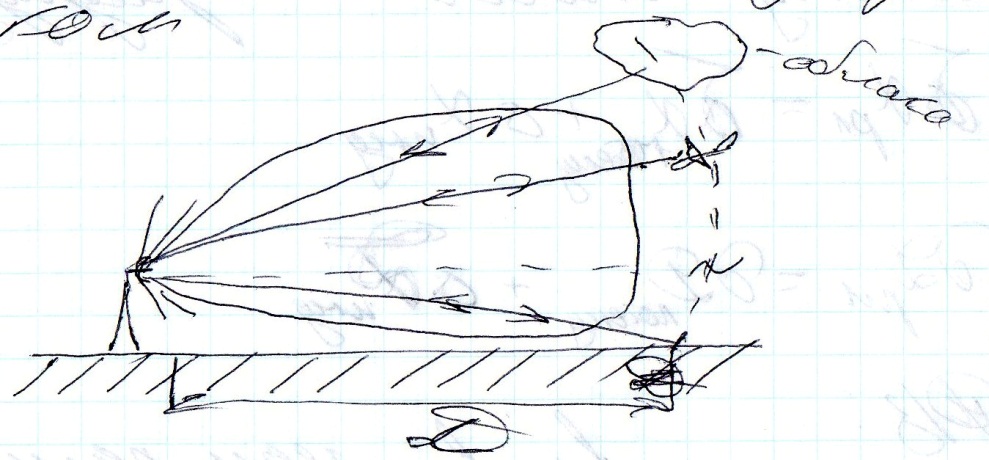
Пассивная помеха(ПП)-отражение от земной поверхности и облаков.
Сигнал создаваемый передатчиком помех.
Мешающие сигналы SЗП (t) и SОБЛ(t) значительно затрудняют обнаружение полезных сигналов Sц(t).
Эти пассивные отражения бывают на столько мощными(интенсивными) что обнаружить полезный сигнал практически не возможно. в изучаемой нами РАС, где обнаружение цели и определение координатосуществляется путем обнаружения отметки цели на экране индикатора и отсчете ее координат, эти пассивные помехи засвечивают с большой яркостью некоторые участки экрана в пределах которых обнаружить отметку цели невозможно поэтому необходимо принемать следующие меры, для подавления этих пассивных помех, что бы выделить полезные сигналы от движения цели на фоне сигналов от неподвижных объектов ЗП и облака используя отличия в частотах этих сигналов.
S(t) fи=fО-fД f=Ʊ/ λ
FЗН=f О=> fД=0 – отсутствует
fОБЛ=fО-fД fОБЛ<<fД
Структурная схема устройства ЧПК (через периодной компенсации) пассивных помех имеет вид. ВУ-вычитающие устройства
ФД
ЛЗ Т3=Т4
ВУ
Устройства приведения полярности
индикатор
Опорный сигнал
Si+1(t)
Si(t)
Si(t,tи)
СУПЧ
Сигнал текущего периода. ЛЗ-линя задержки=устройство запоминания предыдущего сигнала.
На выходе ВУ образуется разностный сигнал: полезные видео импульсы изменяющиеся по величине и полярности на фоне остатков не скомпенсированных помех.
На индикатор нужно подавать импульсы одной полярности. Устройство приведения полярности делает «-» видео импульсы «+», поэтому на индекатор поступает послед «+» видео импульс.
В результате работы устройства ЧПК уровень яркости засвета экрана пассивными помехами значительно уменьшается, но полностью компенсированные пассивные помехи не удаляются.
По этому дальность обнаружения цели при включенном СДЦ (в режиме СДЦ) составляет 40-60% от дальности обнаружения цели при отсутствии помех
44.реальная разрешающая способность РЛ по азимуту и дальности
45.реальная погрешность определения РЛ азимута и дальности цели
Помехоустойчивость-оценка реакции РЛ на помеху.
Технические характеристики-все технические параметры, выбором которых обеспечивается требуемые тактические характеристики.
46.поляризационные методы защиты РЛ от пассивных помех
ВП-закон изменения направления вектора Е(Н) за период
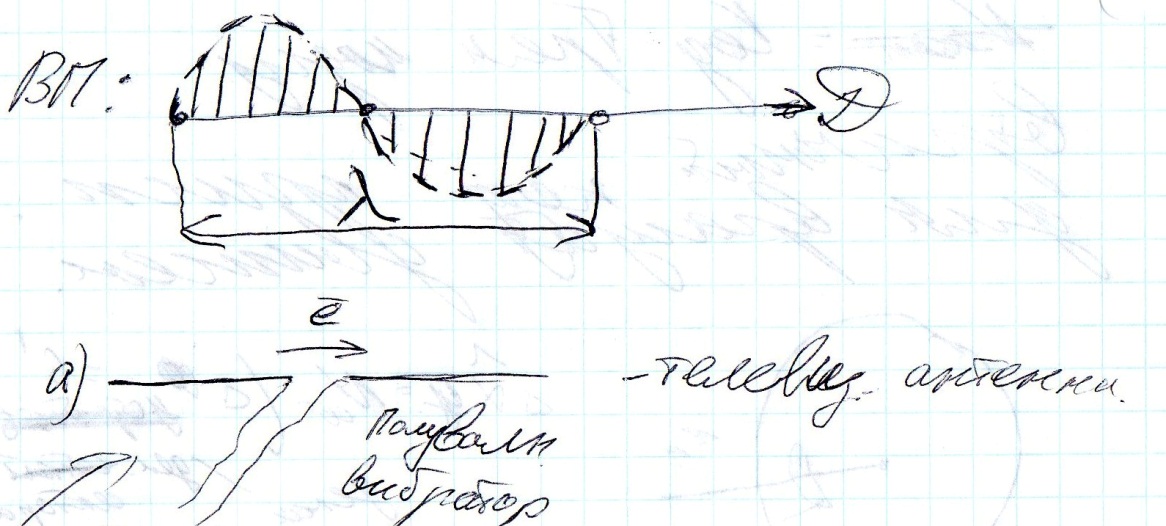
Расположение антены так, защита от помех с вертикальной поляризации.
РЛ. Много помех различной поляризации
Для защиты от них используется поляризационной …., устанавливаемый на выходе антены перед облучателем.
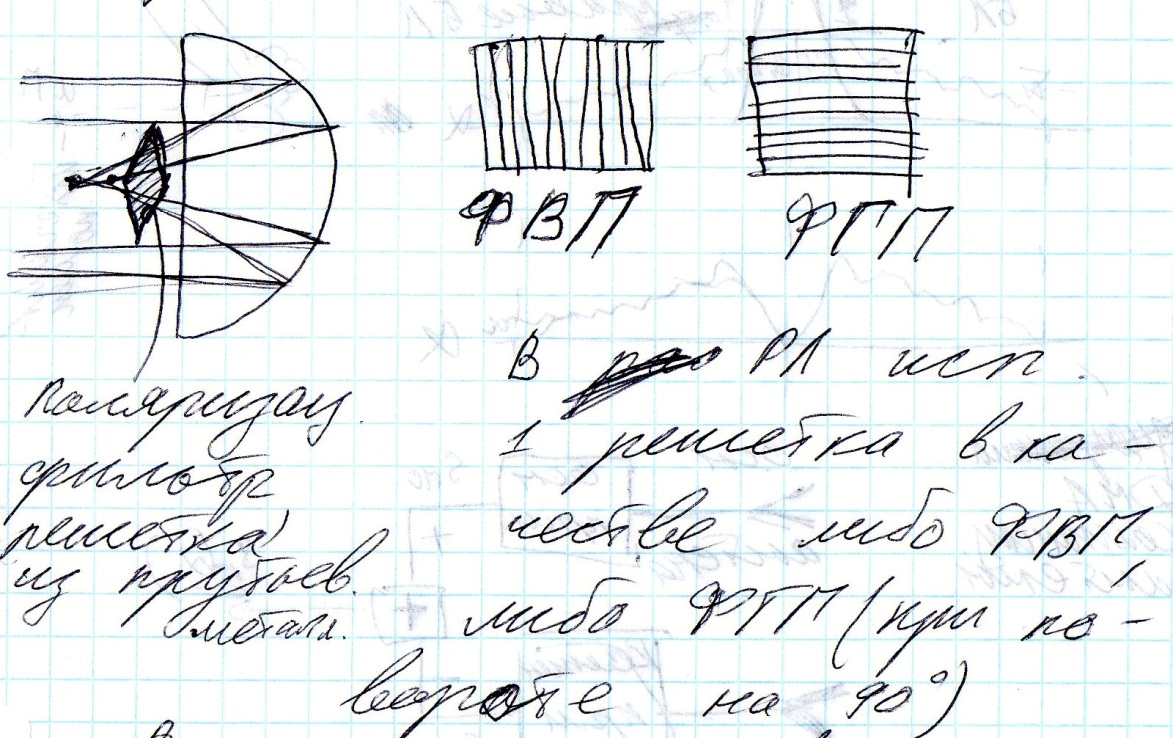
Оператор устанавливает решетку по факту.
Выбирают ГП или ВП по меньшей помехе.
Работа РЛ на излучение так же определяется либо с ГП, либо с ВП
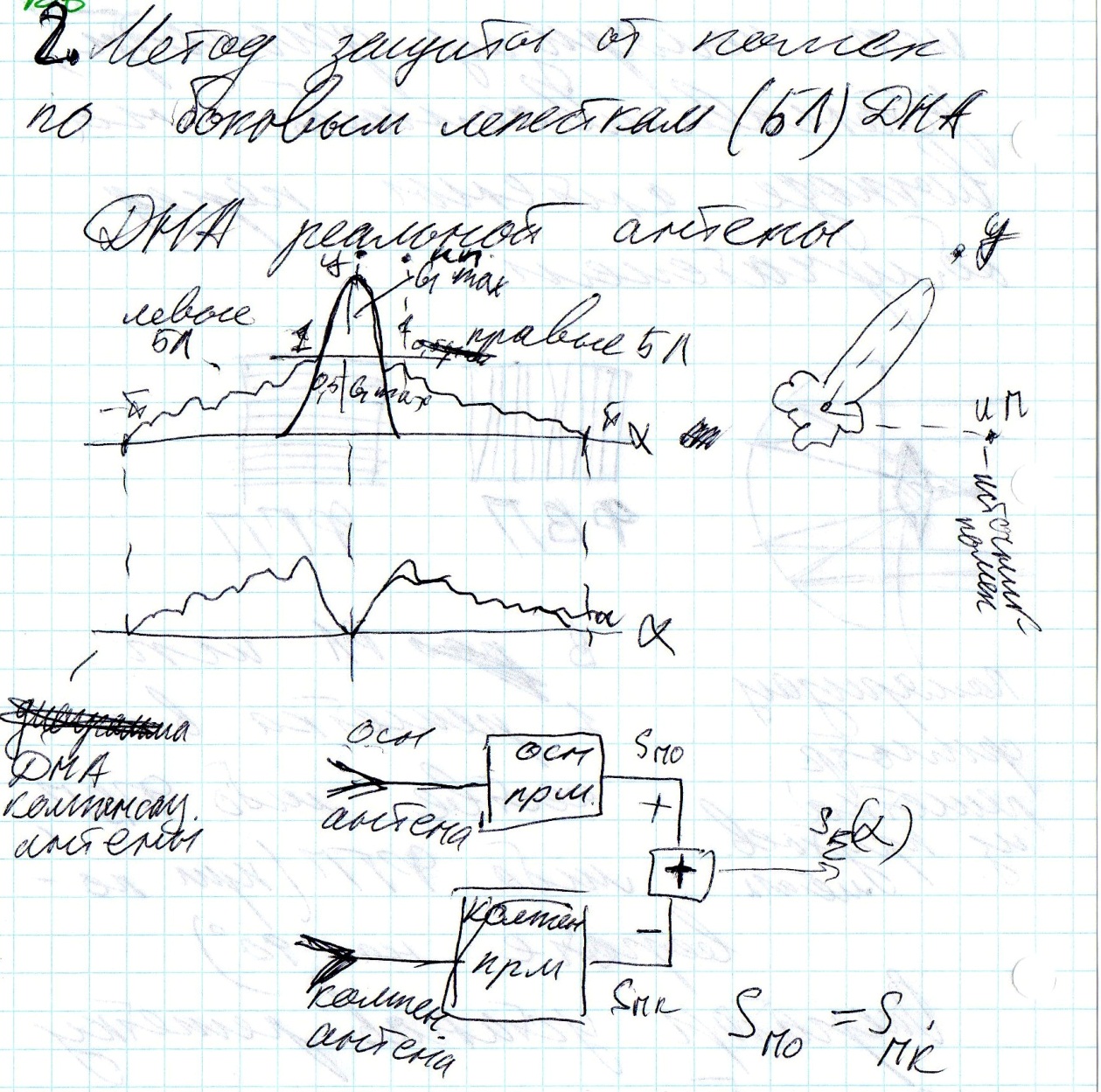
47.принципы защиты РЛ от помех, принимаемых по боковым лепесткам ДНА
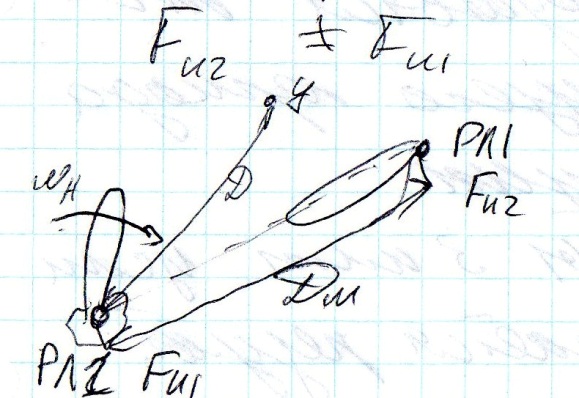
48.принципы защиты РЛ от несинхронных импульсных помех
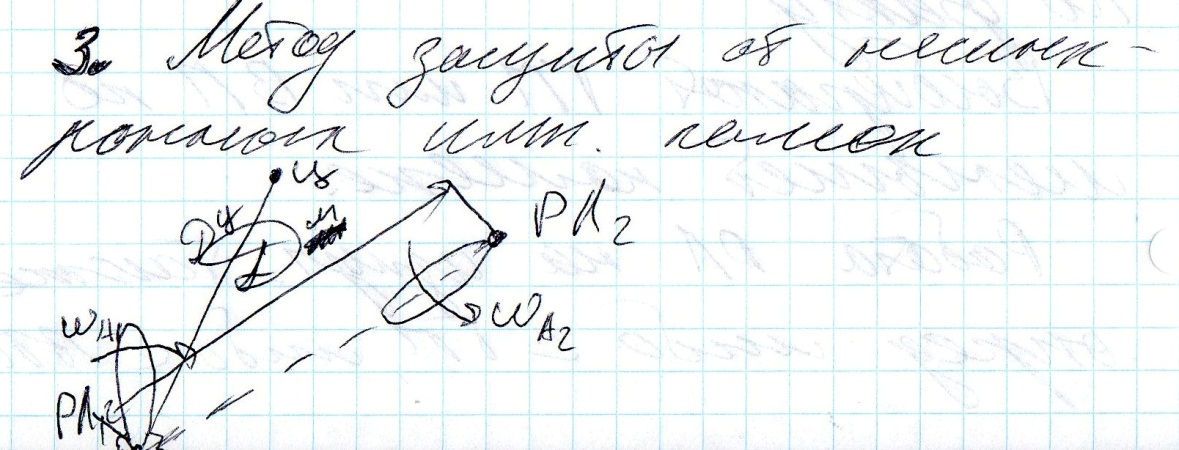
Сигнал РЛ2-помеха для РЛ1
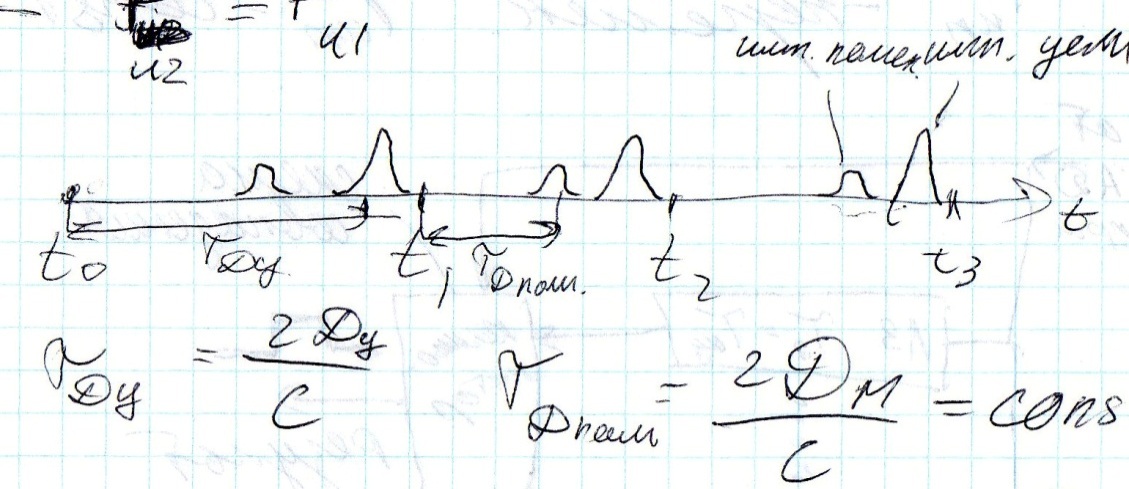
Импульсные помехи имитируют ложную цель
Несинхронная импульсная помеха
Если хотя бы 3 имитируемые цели совпадут выдается результаты импульса
Импульсы помехи через схему совпадения не приходят (очень редко), т.к. они от периода к периоду не совпадают.
Такие устройства защиты от несинхронных импульсных помех выполняются с помощью цифровой техники.
|
|
|
 Скачать 16.17 Mb.
Скачать 16.17 Mb.