практикум по теории систем. Кейс_Розов_М.В.. 1. Приложите переписку группы или скопируйте инвайтлинк в группу. Привет! Какие существуют разновидности гражданских бпла (для пожаров, для сельского хозяйства, тяжёлые, транспортные) Привет! А как подключать квадрокоптер Думаю, надо спросить у преподавателя.
 Скачать 0.91 Mb. Скачать 0.91 Mb.
|

|
Кейс по теории автоматического управления. 1. Приложите переписку группы или скопируйте инвайт-линк в группу. -Привет! Какие существуют разновидности гражданских БПЛА ? (для пожаров, для сельского хозяйства, тяжёлые, транспортные) -Привет! А как подключать квадрокоптер? -Думаю, надо спросить у преподавателя. 2. Найдите проблему, в которой необходимо управлять некоторой величиной, укажите диапазон изменения управляемой величины. скорость квадрокоптера (0-50км/ч). 3. Опишите ваш объект управления. Теория управления рассматривает каждый объект управления с формальной точки зрения «вход-выход».
4. Предложите приборы, устройства, которые могут генерировать входной сигнал объекта управления. Будем называть такие девайсы актуаторами. Плата, резервуар для противопожарных реагентов, камера, системами навигации, лазерами, модулями целеуказания. Система мягкой посадки, ведение цели, с возможностью установки тепловизоров, для полива и орошения, опрыскивания. Батарея, держащая заряд до 16 часов радиус приема сигнала со станции до 160 км, инерциальные системы наведения GPS/Глонасс, системы удержания целей, системы безопасности и автоматизации позволят выполнить задание в случае потери радиосигнала. Доп. целевые нагрузки: тепловизор, камера HD, видеокамера и дектор излучений. Можно добавить датчик движения, цвета, расстояния. Большая грузоподъемность БПЛА до 50, 100, 200 кг 5. Оцените особенности входного сигнала управления. Можно ли оказывать положительные и отрицательные управляющие воздействия? Положительное воздействие: 1. Особенности входного сигнала: Понижение и повышение полива с квадрокоптера. 2. Поэтапная доставка груза без вмешательства человека. 3. Безопасное использование, при низком заряде возвращается в положение, с которого был произведён запуск. Отрицательное воздействие: 1. Сбой в системе, БПЛА возвращается в исходную точку, не завершив действия; 6. Выберите минимум еще одну физическую величину, которой необходимо управлять в вашей системе. Датчики удержания высоты дронаУмение удерживать высоту обеспечивается путем анализа давления которое измерят специальный барометрический датчик. Таким датчиком оборудовано большинство современных полетных контроллеров. Принцип работы бародатчика основан на уменьшении атмосферного давления с увеличением высоты. Однако данные барометрического датчика не всегда точны, например, на малых высотах, в помещении или в случае перемены погоды, когда меняется давление. Для того, чтобы повысить точность измерения на небольших высотах (до 10 метров) используются другие типы датчиков, например, ультразвуковой датчик или сонар. Еще один тип датчиков, который помогает квадрокоптеру ориентироваться в пространстве – это датчик визуального позиционирования. 7. Опишите примерное размещение узлов системы управления: 3д или 2д модель.   8. Перечислите возможные возмущения в системе, оцените их величину. Нагрев воды в аквариуме: температура окружающей среды, объем аквариума, начальная температура воды Возмущения в системе – нет точной уверенности в поэтапном использовании дрона, используя программный код для перевозки тяжёлых грузов. 9. Опишите примерное размещение узлов системы управления: 3д или 2д модель. Можно аккуратно от руки или в простом графическом редакторе.   Принципиальная блок-схема системы управления БПЛА Конструкция квадрокоптера: 1) Моторы 2) Регуляторы скорости (ESC) 3) Пропеллеры (пропы) 4) Полётный контроллер (FC) 5) Приёмник р/у (RX) 6) Курсовая камера (FPV cam) 7) Передатчик видео (VTX) 8) Li-Po аккумулятор (batt, аккум)  2д модель квадрокоптера 10) 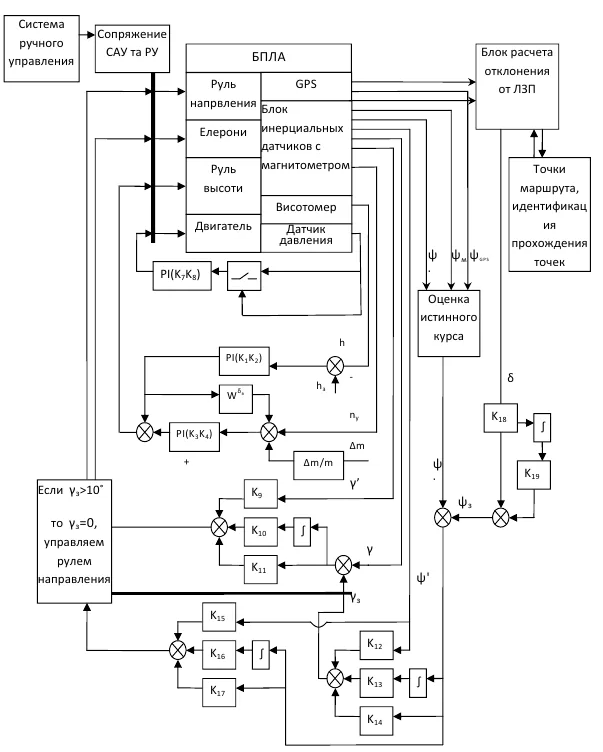 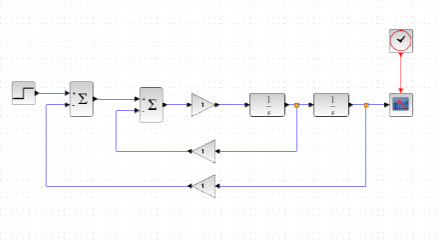 Блок-схема движения груза 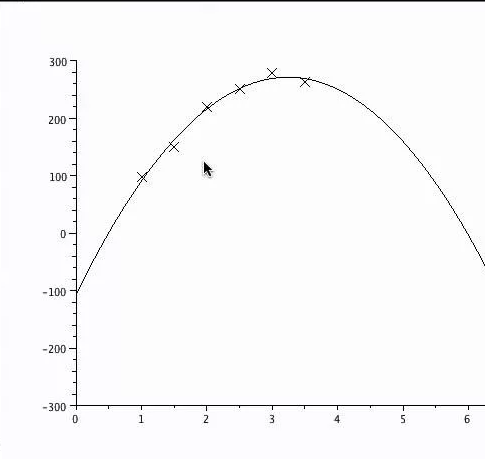 Зависимость scilab (пример полёта) |