лекции. Лекции (2). 1 программирование и настройка технических средств автоматизации и управления ключевые слова
 Скачать 1.31 Mb. Скачать 1.31 Mb.
|

|
5. Иногда встречается необходимость аналогового ввода дискретных сигналов. Допустим, что DC сигнал, подаваемый на вход ПЛК, может принимать значения только от 0 до 5 вольт, а вход контроллера, рассчитанный на работу с сигналами 0 …24 B, распознаёт значения ON и OFF на уровне примерно 12-14 вольт. Это означает, что фактически подаваемый сигнал будет слишком мал для того, чтобы контроллер мог распознать уровни включенного и выключенного состояний. Чтобы обеспечить нормальные условия для ввода и таких сигналов, можно рекомендовать использование промежуточного формирователя на основе чувствительных пороговых устройств. Такими устройствами могут быть компаратор или триггер Шмитта, функциональные блоки которых предусмотрены практически во всех средах программирования. 1.2.3 Пример применения 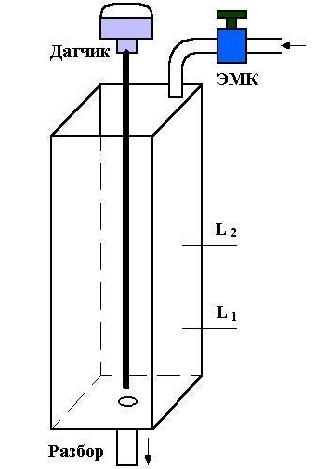 В резервуаре высотой 100 см и квадратным сечением по внутреннему контуру 12 х 12 см2 налита вода (рис.1.6). Уровень воды может изменяться за счёт её пополнения от питающей магистрали через электромагнитный клапан (ЭМК) и уменьшения от естественного расхода. Уровень измеряется датчиком ИСУ – 100 И, который преобразует его в токовый сигнал 0…20 mA и передаёт на вход контроллера для выработки управляющих воздействий на ЭМК. В резервуаре высотой 100 см и квадратным сечением по внутреннему контуру 12 х 12 см2 налита вода (рис.1.6). Уровень воды может изменяться за счёт её пополнения от питающей магистрали через электромагнитный клапан (ЭМК) и уменьшения от естественного расхода. Уровень измеряется датчиком ИСУ – 100 И, который преобразует его в токовый сигнал 0…20 mA и передаёт на вход контроллера для выработки управляющих воздействий на ЭМК.Задание: определить уставки на срабатывание и отключение ЭМК, обеспечивающие включение клапана при опускании уровня до отметки L1, при которой остаток воды в ёмкости равен 3 литрам; после этого долить в неё 7 литров и выключить ЭМК с возможностью непрерывного повторения цикла. Решение. Токовый сигнал преобразуется в масштаб напряжения по схеме рис. 1.4. Прибор измеряет уровень, а не объём, т.е. его показания будут одинаковы при любых значениях поперечного сечения резервуара. Но так как по условиям задачи требуется управлять объёмом, нужно рассчитать, на каких значениях уровня объём будет равен 3 и 10 литрам. Так как L = V / S, а S = 12 ∙ 12 = 144 см2 , получено: L1 =3000 см3 / 144 см2 = 20,83 см, L2 = 10000 см3 / 144 см2 = 69,4 см. Если учесть, что при уровне 100 см входной сигнал контроллера равен 10 B, а это в свою очередь соответствует числу 255. то можно перевести найденные значения L1 и L2 в их целочисленные эквиваленты: X1 = 255 ∙ L1 / 100 = 53; X2 = 255 ∙ L2 / 100 = 177. Найденные значения X1 и X2 при составлении программы необходимо ввести в качестве порогов срабатывания блоков, контролирующих изменение уровня воды в резервуаре. Программно реализовать тот вариант управления, который рассмотрен в данном примере, можно по-разному. 6. В практике использования ПЛК, и в схемотехнической её части, и в программной, постоянно присутствуют эти два понятия: аналоговый и дискретный. Даже на только – что приведенных рисунках видно, что есть блоки ввода обоих этих типов сигналов. Графически цепи передачи аналоговых сигналов могут обозначаться в одних программных средах утолщёнными, в других - сдвоенными линиями. Порты подключения аналоговых линий связи могут отмечаться только им присущей зеленоватого цвета подсветкой. Отдельные блоки могут иметь входы или выходы для аналоговых или дискретных сигналов. Цепи подключения этих сигналов на поле расположения программы отображаются по-разному, и соединять вход одного типа с выходом другого типа не допускается. Даже сами типы и модели контроллеров отличаются способами задания типов входов и выходов, их количества и т.д. 2. Обзор языков и сред программирования ПЛК ПЛК – это логические контроллеры. Они в первую очередь были предназначены для замены релейных элементов схем, работающих, как известно, по принципу «включено / выключено». Это не говорит о том, что с их помощью нельзя обрабатывать аналоговые сигналы. В некоторых типах контроллеров уже заложена возможность обработки таких сигналов, в других - эта задача может решаться применением специальных модулей расширения (как в контроллерах LOGO, например). В любом случае, первое, с чем надо определиться перед составлением программы, - каким образом “объяснить” контроллеру то, какую задачу он должен выполнить. В разных языках программирования это делается по-разному. Программирование работы гирлянды, работающей в режиме бегущей волны Построение многоцветной гирлянды, работающей в режиме «бегущая волна», основывается на использовании нескольких цепочек с последовательно соединёнными одноцветными лампами. Эти цепочки организуются в жгут таким образом, чтобы лампы одного цвета пространственно были смещены относительно ламп других цветов на фиксированное расстояние. При поочерёдном включении цепочек создаётся зрительное впечатление «бегущей волны». Для обеспечения такой последовательности переключений создадим условия, при которых установка в ON любого ( i ) –го R-S триггера, задающего интервал горения одной цепочки, будет готовить срабатывание ( i+1) –го триггера и сбрасывать в OFF состояние предыдущего, т.е. ( i - 1) –го триггера. Это внесёт определённость в последовательность переключений цепочек при составлении программы. Запуск схемы в работу будем производить включением тумблера, а с целью упрощения программы откажемся от использования начального сброса триггеров в состояние OFF при включении. 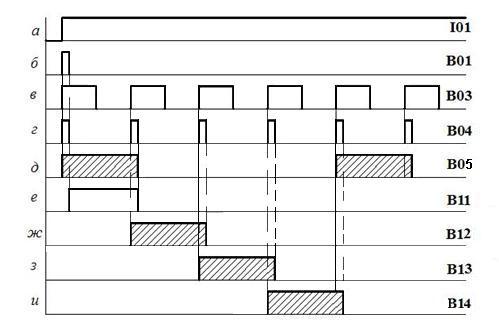 Рис. 3.24 Приведённое словесное описание работы изобразим в виде временных диаграмм (рис. 3.24), представляющих собой более подробную детализацию функций, выполняемых будущей программой. Включение тумблера (диаграмма а) в момент, совпадающий с передним фронтом импульса включения (диаграмма б), переводит первый (верхний) R-S триггер в состояние ON (д) и вызывает запуск генератора импульсов в автоколебательном режиме с устанавливаемым периодом колебаний. Выходные импульсы (в) генератора после «дифференцирования» по переднему фронту (г) подаются на конъюнкторы 2-го, 3-го и 4-го каналов, где вместе с сигналами подготовки к срабатыванию (выходы B 18, B 19 и B 20 на рис. 3.25) участвуют в установке соответствующего триггера в состояние ON. Сигнал подготовки к срабатыванию второго R-S триггера (показан на диаграмме е) задерживается на 100 ms относительно момента появления его на выходе первого триггера (диаграмма д). Конъюнкторы, фиксирующие совпадение сигналов с диаграмм (г) и (е), обеспечивают запуск триггера второго канала (ж) и сброс триггера первого канала (д). Продолжительность включенных состояний каналов равна периоду колебаний генератора (д). Переключения со второго канала на третий и с третьего на четвёртый происходят аналогично описанному. Отличие существует лишь в обеспечении установки активного состояния первого триггера, так как функционально она происходит несколько иначе: помимо переключения с четвёртого канала на первый, которое выполняется по тому же принципу, что и остальные, надо обеспечить начальный запуск триггера при включении. Основная и дополнительная литература Основная литература 1. Втюрин В. А., Автоматизированные системы управления технологическими процессами. Основы АСУТП: Технологического института ЮФУ, 2007 - 271c. 2. Пономарев О. П., Наладка и эксплуатация SCADA-системы. Промышленные шины и интерфейсы. Общие сведения о средствах автоматизации программируемых логических контроллерах и одноплатных компьютерах. - Калининград: Ин-т «КВШУ», 2006 - 80с. 3. Хетагуров Я. А., Проектирование автоматизированных систем обработки информации и управления (АСОУИ). – М.: Высшая школа 2006 - 223с. 4. Втюрин В. А., Автоматизированные системы управления технологическими процессами. Программно-технические комплексы. - СПб: СПбГЛТА, 2006 - 233с. 5. Благовещенская М. М., Информационные технологии систем управления технологическими процессами. - М.: Высшая школа 2005 - 768с. Дополнительная литература: 1. Трегуб В. Г., Ладонюк А. П., Плужников Л. Н., Проектирование, монтаж и эксплуатация систем автоматизации пищевых производств. – М.: Агропромиздат, 2001 – 352с. 2. Мамиконов А. Г., Основы построения АСУ. – М.: Высшая школа, 2000 -311с. 3. Норенков И. П. Введение в автоматизированное проектирование технических устройств и систем. – М.: Высшая школа, 2000 - 311с. 4. Алексеев К. А., Антипин В. С., «Монтаж средств измерений и автоматизаций». Справочник и др.: под редакцией А.С. Клюева. 3-е изд., перераб. и доп. - М.: Энергоиздат, 2000 - 488с. 5. Сосонкин В. Л. Программное управление технологическим оборудованием. - М.: Машиностроение, 2001 – 512с. 6. Ранеев Г. Г., Тарасенко А. П., Методы и средства измерений. - М.: «Академия» 2003. 7. Олифер В.Г., Олифер Н.А., Компьютерные сети. Принципы, технологии, протоколы. - СПб.: Питер, 2001 - 672с. 8. Густав Олсон, Джангуидо Пиани, Цифровые системы автоматизации и управления. -СПб.: Невский диалект, 2001 - 557с. 9. Горшков Б. И. Автоматическое управление: - М.: ИРПО: Издательский центр «Академия», 2003 - 304с. 10. Сальгадо М.Е., Гудвин Г.К., Гребе С.Ф., Проектирование систем управления, -М.: БИНОМ. Лаборатория знаний, 2004 - 911с. 11. Аношкин А.С., Кадпров Э.Д., Хозеров В.Г., Техническое и программное обеспечение распределенных систем управления. –СПб.: «П-2», 2004 - 368с. 12. Шишмарев В. Ю., Типовые элементы систем автоматического управления.-М.: Издательский центр. Академия, 2004 - 304с. |