1. Signallar elektron sensorli signal
 Скачать 0.57 Mb. Скачать 0.57 Mb.
|

|
1. Signallar elektron sensorli signal Signal tushunchasi elektronikaning asosiy tushunchalaridan biridir. Signal - bu ko'plab tizimlarga ega bo'lgan tizimda mavjud bo'lgan, bu tizimga tashqi ta'sirlarga mos keladigan jismoniy jarayon. Signalning asosiy xususiyati shundaki, uning ushbu tizimga ta'siri haqida ma'lumot mavjud. Haqiqiy jismoniy jarayonlar o'z vaqtida sodir bo'lganligi sababli, ushbu jarayonlarni ifodalovchi signalning matematik modeli sifatida vaqtning fizik jarayonlardagi o'zgarishlarni aks ettiruvchi funktsiyalari qo'llaniladi. Signal tovushli, yorug ', pochta jo'natmasi shaklida bo'lishi mumkin va hokazo. Elektr shaklidagi eng keng tarqalgan signal U (t) vaqtga nisbatan kuchlanishdir. \  Signal turlari Birinchi tur elektr signalidir; shuningdek, optik, elektromagnit va akustik signallar mavjud. Shunga o'xshash bir nechta boshqa turlari mavjud, ammo ular mashhur emas. Signalni uzatish turlari ancha farq qiladi, shuni ta'kidlash kerakki, ushbu tasnifga muvofiq signallar analog, diskret va raqamli bo'linadi. Ko'pincha bunday signallar elektr qurilmalarining ishlashini ta'minlash uchun ishlatiladi. 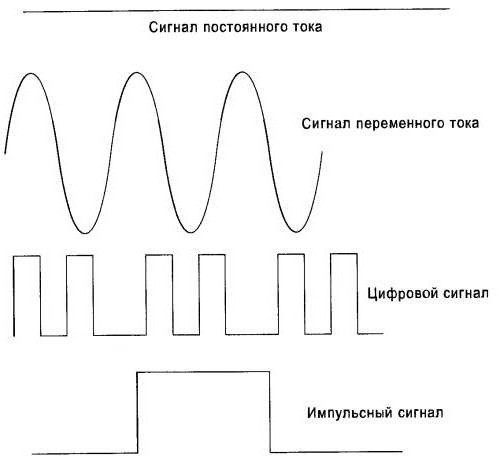 Signal nima uchun ishlov beriladi? Signalni qayta ishlashning boshqa sabablarini ham ta'kidlash kerak. U uzatiladigan chastotalarni siqishdan iborat, ammo barcha ma'lumotlarga zarar etkazmasdan. Keyin u yana formatlanadi va uzatiladi. Bu sekin tezlikda amalga oshiriladi. Agar analog va raqamli signallar haqida gapiradigan bo'lsak, unda bu erda maxsus usullardan foydalaniladi. Filtrlash, burilish va boshqa ba'zi funktsiyalar mavjud. Agar signal buzilgan bo'lsa, ular ma'lumotni tiklash uchun kerak. 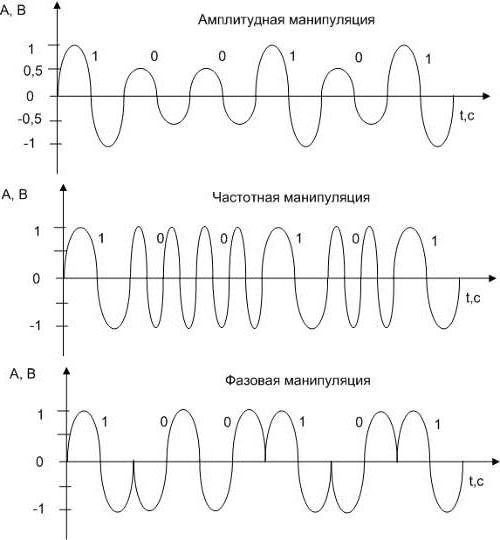 Signalning tasnifiAxborot tashuvchining jismoniy tabiati bo'yicha: elektr; elektromagnit; optik; akustik Signalni o'rnatish usuli bo'yicha: analitik funktsiya tomonidan berilgan muntazam (deterministik); tartibsiz (tasodifiy), istalgan vaqtda ixtiyoriy qiymatlarni oladigan. Bunday signallarni tavsiflash uchun ehtimollar nazariyasi apparati ishlatiladi. Signal parametrlarini tavsiflovchi funktsiyaga qarab analog, diskret, kvantlangan va raqamli signallar ajratiladi: uzluksiz (analog), doimiy funktsiya bilan tavsiflangan; vaqtning ma'lum bir nuqtalarida olingan namunalar funktsiyasi bilan tavsiflangan diskret; kvantlangan daraja; daraja bo'yicha raqamlangan diskret signallar (raqamli). Analog signal (AC)Analog signal Signallarning aksariyati tabiatan o'xshashdir, ya'ni ular vaqt ichida doimiy ravishda o'zgarib turadi va ma'lum bir oraliqda istalgan qiymatlarni qabul qilishi mumkin. Analog signallar vaqtning ba'zi bir matematik funktsiyalari bilan tavsiflanadi. Analog signallar telefoniya, radioeshittirish, televidenieda ishlatiladi. Bunday signalni kompyuterga kiritish va uni qayta ishlash mumkin emas, chunki har qanday vaqt oralig'ida u cheksiz qiymatlar to'plamiga ega va uning qiymatini aniq (xatosiz) aks ettirish uchun bitning cheksiz kengligi raqamlari talab qilinadi. Shuning uchun analog signalni ma'lum bir bit kengligidagi raqamlar ketma-ketligi bilan ifodalanadigan qilib aylantirish kerak. Diskret signalAnalog signalni tanlab olish signalning vaqtning diskret momentlarida olingan qiymatlar ketma-ketligi sifatida ifodalanishini anglatadi. Ushbu qiymatlar deyiladi hisoblash. Δt deyiladi namuna olish oralig'i. Miqdor signalAsosiy maqola: Kvantizatsiya (informatika) Kvantlash paytida signal qiymatlarining butun diapazoni sathlarga bo'linadi, ularning soni berilgan bit kengligi raqamlarida ifodalanishi kerak. Ushbu darajalar orasidagi masofa Δ kvantlash bosqichi deyiladi. Ushbu darajalar soni N (0 dan N-1 gacha). Har bir darajaga raqam beriladi. Signal namunalari kvantlash darajalari bilan taqqoslanadi va signal sifatida ma'lum bir kvantlash darajasiga mos keladigan raqam tanlanadi. Har bir kvantlash darajasi n-bitli ikkilikda kodlangan. Kvantlash darajalari soni N va bu darajalarni kodlovchi ikkilik sonlarning bitlari n soni n ≥ log 2 (N) munosabati bilan bog'liq. То́ковая петля́ (currentloop) — способ передачи информации с помощью измеряемых значений силы электрического тока. Для задания измеряемых значений тока используется, как правило, управляемый источник тока. По виду передаваемой информации различаются аналоговая токовая петля и цифровая токовая петля. Принципы работыСтандарт цифровой токовой петли использует отсутствие тока как значение SPACE (низкий уровень, логический ноль) и наличие сигнала — как значение MARK (высокий уровень, логическая единица). Отсутствие сигнала в течение длительного времени интерпретируется как состояние BREAK (обрыв линии). Из-за неидеальности источника тока, максимально допустимая длина линии (и максимальное сопротивление линии) зависит от напряжения, от которого питается источник тока. Например при типичном напряжении питания 12 вольт сопротивление не должно превышать 600 Ом. Источник тока может располагаться в приёмном или передающем конце токовой петли. Узел с источником тока называют активным. В зависимости от конструкции как передатчик, так и приёмник, могут быть либо активными (питать токовую петлю), так и пассивными (питаться от токовой петли). Аналоговая токовая петляПрименяется смещенный диапазон 4—20 мА, то есть наименьшее значение сигнала (например, 0) соответствует току 4 мА, а наибольшее — 20 мА. Таким образом весь диапазон допустимых значений занимает 16 мА. Нулевое значение тока в цепи означает обрыв линии и позволяет легко диагностировать такую ситуацию. Интерфейс аналоговой токовой петли позволяет использовать разнообразные датчики (давления, потока, кислотности и т. д.) с единым электрическим интерфейсом. Также данный интерфейс может использоваться для управления регистрирующими и исполнительными устройствами: самописцами, заслонками и т. д. Основное преимущество токовой петли (по сравнению с более дешёвой параметрической передачей напряжением) — то, что точность не зависит от длины и сопротивления линии передачи, поскольку управляемый источник тока будет автоматически поддерживать требуемый ток в линии. Такая схема позволяет запитывать датчик непосредственно от линии передачи. Несколько приёмников можно соединять последовательно, источник тока будет поддерживать требуемый ток во всех одновременно (согласно закону Кирхгофа). Но если в цепи появятся утечки, работа токовой петли нарушится, и средствами реализации самой токовой петли это не обнаруживается, что необходимо учитывать при проектировании ответственных производственных участков. Поверх аналоговой токовой петли можно передавать цифровую информацию. Такой способ передачи данных описан в HART-протоколе. Конкурирующими протоколами, способными в будущем вытеснить HART, являются различные цифровые полевые шины, такие как Foundation fieldbus или PROFIBUS. ------------------------------------ Аналоговые полевые интерфейсы: токовая петля 4-20 мА – от простого к сложному Интерфейс токовая петля 4-20 мА – один из самых старых, и в то же время самых надежных и помехоустойчивых стандартов передачи информации на большие расстояния. Основным его применением являются промышленные системы автоматики. В последнее время, в связи с распространением цифровых методов управления, для систем на основе токовой петли 4-20 мА разработан набор коммуникационных стандартов для промышленных сетей HART (Highway Addressable Remote Transducer). Любая система управления помимо электроники и исполнительных устройств включает в себя набор интерфейсов, с помощью которых происходит сопряжение всех ее элементов в единое целое. Именно интерфейсы обеспечивают надежное функционирование оборудования в реальных, порой весьма жестких условиях. Анализ наиболее популярных аналоговых и цифровых способов обмена информацией с удаленными элементами показывает, что многие из них основаны на использовании токовой петли (Current Loop). Благодаря простоте, высокой помехозащищенности и ряду других положительных качеств, токовая петля, особенно интерфейс 4-20 мА, заслуженно стала одной из самых распространенных основ для передачи информации на большие расстояния. Почему ток, а не напряжение? Как известно из школьного курса физики, режим работы участка электрической цепи (двухполюсника) определяется двумя основными параметрами: напряжением U – разностью потенциалов на его концах, и током I, протекающим через него (рисунок 1). В общем случае связь между значениями U и I может быть достаточно сложной, ведь она зависит от внутренней начинки двухполюсника, который может содержать все что угодно, в том числе и источники электрической энергии. Однако в простейшем случае, – для резистора с сопротивлением R, – эти два параметра связаны законом Ома: U = I × R.  Рис. 1. Основные соотношения для резистивного двухполюсника Таким образом, при использовании на приемной стороне резистора в качестве датчика входного сигнала, теоретически нет никакой разницы между способами передачи сигнала – с помощью напряжения или с помощью тока, ведь эти два параметра взаимосвязаны. Более того, с технической точки зрения передавать информацию с помощью напряжения проще, чем с помощью тока, ведь большинство существующих источников электрической энергии является источниками напряжения, да и приборов, в том числе и полупроводниковых, способных контролировать или регулировать напряжение, намного больше. Кроме этого, система, передающая информацию с помощью напряжения при бесконечно большом сопротивлении измерительного элемента (R ⇒ ∞) практически не потребляет тока (I ⇒ 0). Это означает, что теоретически она может быть намного экономичней, ведь в этом случае мощность сигнала P, а следовательно, и затраты энергии на его передачу могут быть сколь угодно малыми (P = U × I ⇒ 0). И действительно, вряд ли кто-то будет использовать токовую петлю для связи, например, двух микроконтроллеров, расположенных на одной плате в нескольких сантиметрах друг от друга. Однако когда речь заходит о расстояниях больше десяти метров или о передаче информации в сложной электромагнитной обстановке, основные недостатки токовой петли при работе на малых расстояниях превращаются в ее достоинства, и она становится одним из самых надежных и эффективных способов передачи информации. Основным преимуществом токовой петли является высокая точность передачи информации. В реальной системе связи на величину напряжения сигнала на приемной стороне влияют физические параметры линии, в первую очередь – активное сопротивление ее проводников RЛ1 и RЛ2 (рисунок 2). Действительно, согласно второму закону Кирхгофа, сумма напряжений в замкнутом контуре должна быть равна нулю, поэтому напряжение UВЫХ, генерируемое передатчиком, равно сумме падений напряжений на сопротивлениях проводов линии связи UЛ1, UЛ2 и входном сопротивлении приемника UВХ. Это означает, что для точной передачи сигнала, особенно аналогового, с помощью напряжения необходимо каждый раз подстраивать систему под конкретную линию связи. Учитывая, что активные сопротивления проводников RЛ1 и RЛ2 физической линии зависят от многих факторов, в первую очередь от температуры, такую настройку необходимо проводить регулярно, в зависимости от времени суток и погодных условий. 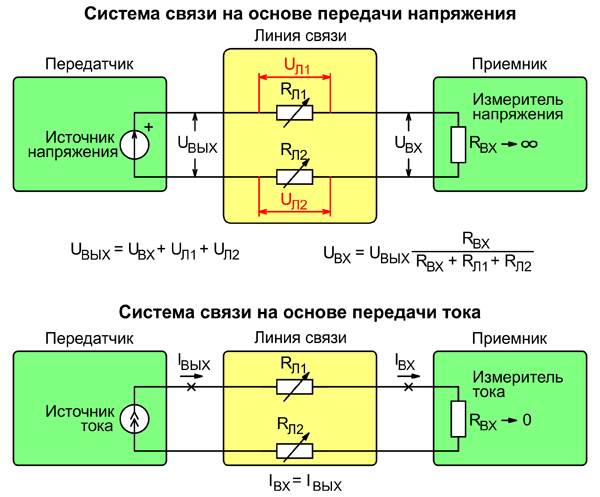 Рис. 2. Системы связи на основе передачи напряжения и тока В отличие от напряжения, величина которого отличается для каждого участка, ток во всех элементах неразветвленной электрической цепи одинаков. Это означает, что качество передаваемой информации (силу тока) можно контролировать не только на приемной, но и на передающей стороне, тем самым подстраиваясь под все изменения параметров линии. Таким образом, система передачи данных на основе токовой петли не требует каких либо дополнительных инструментов калибровки или автоподстройки под конкретную линию связи – эту функцию автоматически выполняет передатчик. Влияние параметров линии связи в системе, передающей информацию с помощью напряжения, теоретически можно уменьшить, увеличив внутреннее сопротивление приемника (в идеальном случае R ⇒ ∞). В этом случае произойдет уменьшение тока в линии, а следовательно, и падение напряжения на сопротивлениях RЛ1 и RЛ2. Однако при работе с длинными линиями это приведет к ухудшению качества связи, поскольку кроме сигнала в системе существуют еще и помехи. Помеха является такой же неотъемлемой частью систем передачи данных как передатчик, приемник и линия связи. В аналоговых системах наличие помех приводит к уменьшению соотношения «сигнал/шум», а в цифровых – к увеличению вероятности ошибки. В системе на основе передачи напряжения напряжение, создаваемое помехой UПОМ, суммируется с выходным напряжением передатчика UВЫХ (рисунок 3), поэтому на приемной стороне их разделение весьма затруднительно. А вот в системе на основе передачи тока любые отклонения выходного сигнала, в том числе и вызванные помехой, могут быть скомпенсированы на передающей стороне. Воздействие помехи в этом случае проявится в виде изменения напряжения на выходе передатчика на величину -UПОМ, но ток в линии останется неизменным. 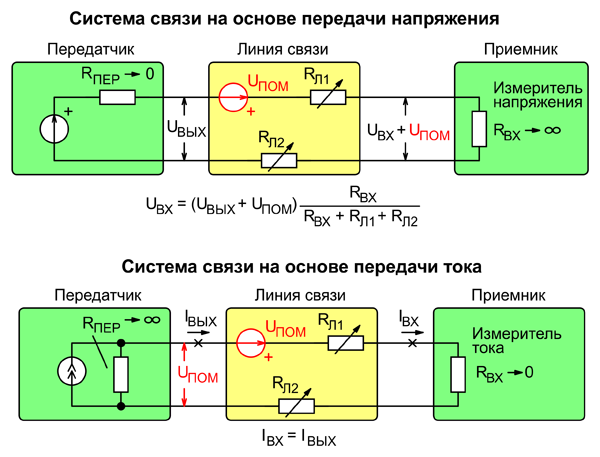 Рис. 3. Влияние помехи на различные системы связи Это также можно объяснить иначе: в системе на основе передачи напряжения энергия помехи выделится на входе приемника, где она причинит максимальный вред, а в системе на основе передачи тока – на выходе передатчика, где эффект от ее воздействия будет минимальным. Действительно, поскольку падение напряжения на участке резистивной цепи пропорционально ее сопротивлению, энергия помехи должна выделиться на участке, имеющем максимальное сопротивление. В системе на основе передачи напряжения внутреннее сопротивление передатчика RПЕР (источника напряжения) должно быть как можно меньше, а приемника (вольтметра) – максимально большим (рисунок 3). В системе на основе передачи тока все наоборот: внутреннее сопротивление передатчика (источника тока) должно быть максимально большим, а приемника (амперметра) – минимальным. Таким образом, теоретически (и практически) системы связи на основе токовой петли имеют больший уровень помехозащищенности, чем системы связи на основе передачи напряжения. Интерфейс 4-20 мА В основе интерфейса 4-20 мА лежит токовая петля с рабочими значениями токов в диапазоне 4…20 мА. Изменение значения тока до значения менее 3,8 мА свидетельствует об обрыве линии, а выше 20,5 мА – о коротком замыкании. Таким образом, этот интерфейс позволяет контролировать целостность физических соединений в системе. В общем случае логическое соответствие уровней тока может быть любым, однако традиционно малый уровень соответствует низкому уровню контролируемой величины, а большой – высокому. Так, например, выходной сигнал аналогового датчика, контролирующего уровень заполнения бака, равный 4 мА, будет соответствовать пустому баку, а 20 мА – полному. Если же бак будет заполнен наполовину, то датчик сформирует ток 12 мА (4 + (20 – 4)/2 = 12 мА). В цифровых двоичных системах ток, равный 4 мА, обычно соответствует уровню логического нуля, а 20 мА – логической единице. Прототипом электрического интерфейса 4-20 мА является его пневматический аналог с уровнями давлений 3…15 фунтов на квадратный дюйм (0,2…1 бар). До широкого распространения электроники именно этот стандарт был доминирующим в промышленности. Именно в нем появился «смещенный ноль», когда низкий уровень сигнала отличался от нулевого значения. В свое время это было связано с тем, что, во-первых, давление меньше 0,2 бар было технически сложно обнаружить, а во-вторых – уменьшение давления ниже этой величины свидетельствовало о наличии повреждений. По мере развития электроники, особенно в области микроконтроллеров, пневматические системы управления постепенно вытеснялись электронной автоматикой. Однако до сих пор выпускается множество устройств с пневматическими интерфейсами управления, например, регулирующая арматура для трубопроводов. Это связано с тем, что использование в них электрических приводов технически сложно или дорого. В этом случае используются специализированные преобразователи интерфейсов «токовая петля 4-20 мА» в «давление 3-15 фунтов на квадратный дюйм» (и наоборот), предназначенные для сопряжения электронной и пневматической частей системы управления (рисунок 4).  Рис. 4. Преобразователи электрического интерфейса «токовая петля 4-20 мА» в пневматический «3-15 фунтов на квадратный дюйм» Основными преимуществами интерфейса 4-20 мА являются: простота – в самом простейшем случае удаленное устройство можно подключить с помощью всего двух проводов; высокая точность передачи сигнала – поскольку ток одинаков во всех элементах системы передачи, передатчик всегда знает, какой уровень сигнала получит приемник; высокая помехозащищенность за счет двойного контроля тока (и на стороне передачи, и на стороне приема), позволяющая подключать удаленные (порой до десятков километров) объекты, например, с помощью стандартных телефонных линий; независимость качества связи от длины линии, которая влияет только на максимальную скорость передачи данных; возможность самодиагностики как обрыва, так и короткого замыкания линии; теоретически неограниченная дальность связи – фактически максимальная длина соединительного кабеля ограничена лишь электрической прочностью его изоляции и скоростью передачи данных. Однако, как и любой другой интерфейс, токовая петля имеет ряд недостатков и ограничений, на которые следует обратить внимание при разработке. Основным из них является возможность передачи по одному кабелю только одного сигнала. При большом количестве устройств это может стать проблемой, поскольку кроме увеличения количества кабелей могут возникнуть нежелательные паразитные контуры в цепи заземления, что негативно скажется на помехоустойчивости системы. Также при большом количестве одновременно используемых интерфейсов необходимо уделять особое внимание качеству и состоянию кабелей, поскольку все преимущества токовой петли исчезают при нарушении изоляции передающих линий. Еще одним недостатком токовой петли является относительно низкая (по сегодняшним меркам) скорость передачи информации, напрямую зависящая от длины линии. В отличие от систем на основе передачи напряжения, для которых скорость перезаряда паразитной емкости кабеля можно повысить, например, увеличением мощности передатчика (ведь его кратковременный максимальный выходной ток теоретически ничем не ограничен), выходной ток передатчика для токовой петли не должен превышать 20 мА. Пусть в системе связи используется типовой кабель с погонной емкостью, равной 75 пФ/м. В этом случае отрезок линии длиной 1 км будет иметь емкость 75 нФ. Пусть входное сопротивление приемника равно 250 Ом, что при выходном токе 20 мА обеспечивает напряжение на входе приемника 5 B. В этом случае для заряда паразитной емкости линии до такого напряжения потребуется около 18,5 мкс. Нетрудно подсчитать, что максимальная скорость передачи в этом случае не может превышать 54 кбит/с, и она будет пропорционально уменьшаться по мере увеличения длины кабеля. В реальных системах скорость передачи данных по интерфейсу 4-20 мА обычно не превышает 9600 кбит/с. Тем не менее, для большинства систем управления этого оказывается вполне достаточно. Основные узлы интерфейса 4-20 мА В идеальном случае для создания информационного сигнала следовало бы использовать специализированный управляемый генератор тока. Однако технически оказалось проще разделить функции электропитания и формирования сигнала и использовать в системе два отдельных узла: источник питания, обеспечивающий систему электрической энергией, и управляемый стабилизатор тока, выполняющий функцию генератора (передатчика) сигнала. Это позволило: подключить приемопередающую часть системы к стандартным шинам питания (9 В, 12 В, 24 В и так далее); гибко выбирать необходимый уровень рабочего напряжения; избавиться от привязки источника электрической энергии к передающему узлу. При таком подходе источник питания для приемопередающей части в общем случае может находиться в любой части системы: как в локальном, так и в удаленном оборудовании, а также подключаться в виде отдельного устройства непосредственно в разрыв кабеля линии связи (рисунок 5).  Рис. 5. Варианты построения системы связи на основе интерфейса 4-20 мА Напряжение питания приемопередающей части зависит от падения напряжения в линии связи. Чем длиннее линия связи и чем тоньше провод, тем выше должен быть этот параметр. Для объектов, расположенных на значительном расстоянии, напряжение питания может достигать 120 В и более. В целом напряжение источника питания должно быть приблизительно на 10% больше общего падения напряжения на всех элементах приемопередающего тракта при максимальном токе (20 мА). Если напряжение питания будет ниже, то из-за высокого сопротивления контура управляемый стабилизатор тока просто не сможет обеспечить нужный ток. Повышенное же значение этого параметра в худшем случае, например, при обрыве кабеля, может привести к выходу оборудования из строя. Дистанционное питание удаленного оборудования Поскольку падение напряжения в линии не влияет на качество передачи информации, то возникает вопрос: а можно ли его дополнительно увеличить, отобрав часть энергии сигнала для питания удаленного оборудования? Оказывается, в некоторых случаях это вполне возможно. Например, если на приемной стороне добавить в линию дополнительное сопротивление 500 Ом (рисунок 6), то при протекании тока на нем будет формироваться падение напряжения от 2 В (при токе 4 мА) до 10 В (при токе 20 мА), что вполне достаточно для питания маломощных измерительных узлов (в данном случае мощность при токе 4 мА будет равна 8 мВт). Очевидно, что введение дополнительного падения напряжения в линии должно быть скомпенсировано соответствующим увеличением напряжения источника питания. 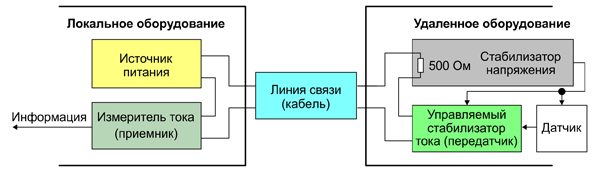 Рис. 6. Дистанционное питание удаленного датчика с помощью токовой петли В большинстве случаев мощности сигнала, снимаемого с токовой петли интерфейса 4-20 мА, достаточно для питания большинства датчиков, например, датчиков температуры или влажности, положения ротора электродвигателя и других малопотребляющих устройств. Однако если разработчику необходимо удаленно питать устройства, содержащие более мощные приборы, например, реле или жидкокристаллический экран с LED-подсветкой, тогда необходимо использовать иные варианты: либо отдельный источник питания, либо другие разновидности интерфейса 4-20 мА. Разновидности интерфейсов 4-20 мА Все рассмотренные выше варианты использования интерфейса 4-20 мА относились к его двухпроводной версии, которая является самой простой и бюджетной. Как было сказано выше, единственным недостатком двухпроводного соединения является ограниченная мощность питания удаленного оборудования, связанная с конечным значением как максимального тока в линии (20 мА), так и максимального падения напряжения на приемной стороне. Этот недостаток полностью устранен в четырехпроводной версии рассматриваемого интерфейса, в которой для питания удаленного оборудования используется отдельный узел, подключаемый с помощью отдельного электрического кабеля (рисунок 7). При таком подходе информационная часть системы оказывается полностью изолированной от всех остальных цепей (при условии, что передатчик и приемник интерфейса 4-20 мА тоже содержат соответствующие изолирующие компоненты), что обеспечивает наивысший уровень защиты от электромагнитных помех. Напряжение питания удаленного оборудования в общем случае может быть любым. Чаще всего используются постоянные (12, 24 или 48 В) или переменное (220 В, 50 Гц) напряжения, что позволяет использовать для этой цели стандартные шины и источники питания. 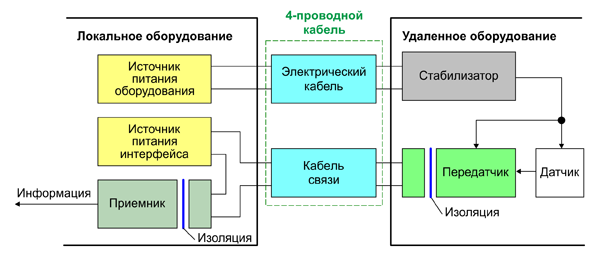 Рис. 7. Четырехпроводная версия интерфейса 4-20 мА Очевидно, что такой вариант подключения является самым сложным и дорогим, однако он позволяет дистанционно питать оборудование теоретически любой мощности и передавать информацию с наивысшим уровнем помехозащищенности. Конечно, на практике реальная мощность подключаемого оборудования ограничена пропускной способностью электрического кабеля, да и к интерфейсу 4-20 мА, откровенно говоря, такой способ соединения относится лишь формально, ведь в данном случае речь идет фактически о двух параллельно работающих независимых системах: системе питания и системе передачи информации. Незначительно упростить систему можно путем замены двух двухпроводных кабелей одним четырехпроводным. Однако этот вариант в большинстве случаев будет компромиссным, поскольку жилы проводников электрической части кабеля чаще всего должны иметь большее сечение, а при высоких питающих напряжениях – и большую прочность изоляции, по сравнению с проводами его информационной части. Да и вероятность ошибочного подключения оборудования при использовании четырехпроводного кабеля значительно возрастает. Если позволяют технические условия, то можно использовать промежуточный – трехпроводный вариант интерфейса. Его потенциальные возможности (высокая мощность дистанционного подключаемого оборудования и уровень помехозащищенности) за счет отдельных линий питания и передачи информации аналогичны четырехпроводной версии, но, за счет исключения электрической изоляции между разными частями системы, эта версия интерфейса оказывается проще и бюджетней. Например, в трехпроводной версии интерфейса 4-20 мА приемопередающие узлы и все остальное оборудование можно питать от одного источника (рисунок 8). 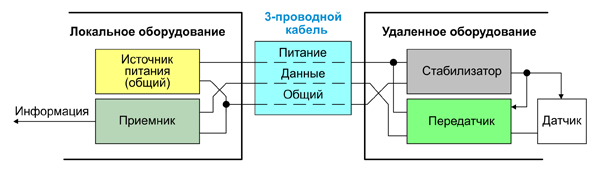 Рис. 8. Трехпроводная версия интерфейса 4-20 мА Таким образом, трех- и четырехпроводные версии 4-20 мА позволяют увеличить мощность дистанционно подключаемого оборудования, однако при этом возрастает как сложность, так и стоимость системы. Кроме этого, при использовании систем на опасных объектах увеличение уровня мощности, подаваемой к удаленному узлу, может вызвать проблемы с обеспечением требуемого уровня искро-, взрыво- и пожарной безопасности. Следует также отметить, что при использовании двухпроводной версии интерфейса 4-20 мА проблем с сертификацией оборудования для работы во взрывоопасных средах практически не возникает, то есть, на удаленное оборудование подается настолько мало энергии, что там даже нет условий для возникновения искры. Стандарты и примеры применения токовой петли За все время существования токовой петли было разработано несколько вариантов ее практического применения, которые получили достаточно широкое распространение. Изначально (в 50-х годах ХХ века) токовая петля с уровнями сигналов 0-60 мА использовалась в телеграфии, однако из-за недопустимо высокого (даже в то время) энергопотребления уже с начала 60-х годов максимальный уровень тока был уменьшен до 20 мА. На сегодняшний день 20 мА является предельным значением тока для большинства интерфейсов, хотя, в соответствии с ГОСТ 26.011-80, значение этой величины, по согласованию с заказчиком, может достигать 100 мА. В целом современные интерфейсы, использующие токовую петлю для передачи данных, отличаются лишь минимальным уровнем допустимого сигнала, который может быть равен либо 0, либо 4 мА. В ряде случаев для передачи информации может использоваться переменный ток в диапазоне -5…+5 мА (при небольших расстояниях) или -20…+20 мА. Все попытки уменьшить максимальное значение тока для снижения энергопотребления увенчались успехом лишь на коротких линиях, поскольку при малом токе и большой длине кабеля катастрофически падает скорость передачи данных. Токовая петля с уровнями 0-5 мА является физическим уровнем стандарта MIDI (Musical Instrument Digital Interface), широко используемого для обмена данными между электронными музыкальными инструментами. Это формат обеспечивает передачу данных со скоростью 31,25 кбит/с на небольшие расстояния (в пределах студии или концертной площадки). Основным применением токовой петли с уровнями сигнала 4-20 мА являются промышленные системы автоматики, для которых необходима высокая надежность, поэтому в них и используется «смещенный ноль», чтобы своевременно обнаружить неисправность системы управления и принять надлежащие меры для предотвращения возникновения аварийной ситуации. В последнее время, в связи с повсеместным распространением цифровых методов управления, для систем на основе токовой петли 4-20 мА разработан набор коммуникационных стандартов для промышленных сетей HART (Highway Addressable Remote Transducer). Проводная версия данного протокола фактически является надстройкой над аналоговым интерфейсом 4-20 мА и позволяет использовать одну и ту же линию связи для одновременной передачи и аналогового (при ограничении полосы до 25 Гц) и цифрового сигналов. Передача цифровых данных обеспечивается путем подмешивания в аналоговый сигнал высокочастотных несущих с амплитудой ±0,5 мА, модулированных по частоте (1200/2200 Гц) или фазе (3200 Гц). При использовании частотной модуляции пропускная способность цифрового канала равна 1200 бит/с, а фазовая модуляция, за счет использования 8-позиционной манипуляции, позволяет увеличить этот параметр до 9600 бит/с. На момент написания статьи последней является 7-я версия протокола (HART 7), описанная в документе HCF-SPEC-13. Некоторые фрагменты проводной версии данного интерфейса вошли в стандарт IEC 61158-CPF9, а беспроводной – в IEC 62591:2010. Полевой ввод-вывод (англ. fieldIO) — интерфейс для подключения измерительных приборов и исполнительных механизмов (обобщённо называемых полевыми устройствами) к системе управления технологическим процессом. К узлам полевого ввода-вывода подключаются как датчики, измеряющие необходимые параметры технологического процесса, так и исполнительные механизмы, с помощью которых система управления может влиять на ход процесса. Узел ввода-вывод состоит из 3 главных компонентов: Задней базовой панели (англ. baseplate), предназначенной для размещения на ней электронных модулей в специальные позиции (слоты). Внутри базовой панели проходят две шины: одна служит для подачи питания на установленные модули; другая — для информационного обмена между модулями. Модулей ввода-вывода (IOmodules), которые необходимы для приема сигналов с подключенных к ним датчиков или выдачи управляющих сигналов на подсоединенные исполнительные механизмы. В зависимости от направления передачи сигналов (ввод сигналов в систему управления или их вывод) модули осуществляют, соответственно, аналого-цифровое или цифро-аналоговое преобразование. Интерфейсного модуля (interfacemodule), служащего для подключения узла ввода-вывода к цифровой шине передачи данных. Как правило, на шине интерфейсный модуль реализует функции ведомого устройства (ведомое устройство). На базовую панель в специальные слоты устанавливаются модули ввода-вывода и интерфейсный модуль. Количество слотов под установку модулей ввода-вывода может быть разным: от 2 до 16, но, как правило, чётное количество. Чаще всего крайний левый слот предназначен для установки только интерфейсного модуля. Датчики и исполнительные механизмы подключаются с помощью электрических соединений непосредственно к модулям ввода-вывода. При этом модули ввода-вывода различаются по типу подключаемого к ним сигнала, а также канальностью. За исключением крайнего левого слота, размещение модулей ввода-вывода строго не регламентировано, и допускаются произвольные комбинации. Узлы ввода-вывода, как правило, подключаются к контроллерам по специальным цифровым шинам передачи данных. Существует множество стандартов полевых шин, наиболее популярные из которых Profibus DP/PA, Modbus RTU, DeviceNet, Foundation fieldbus.  Модули имеют 1 универсальный канал измерения аналоговых сигналов термопар, термопреобразователей сопротивления, сигналов пирометров, сигналов датчиков вакуума ПМТ, унифицированных сигналов тока, напряжения, сигналов сопротивления, а также 4 независимых канала ввода дискретных сигналов. Модули могут иметь 1 активный унифицированный токовый выход аналоговых сигналов (0…5, 0…20, 4…20) мА с индивидуальной гальванической развязкой в зависимости от модификации модуля. Модули имеют 6 независимых каналов вывода дискретных сигналов с индивидуальной гальванической развязкой с различными типами выхода в зависимости от модификации модуля. Дополнительный функционал – ПИД-регулятор для управления электротермическим оборудованием по температурно-временному алгоритму «разогрев-выдержка-охлаждение» MDS-модули поддерживают протокол MODBUS RTU. Для интеграции модулей в SCADA систему рекомендуется использовать ОРС сервер Master OPC от фирмы Инсат. |