теормех. 1. Структурный анализ кинематического механизма
 Скачать 76.26 Kb. Скачать 76.26 Kb.
|

1. Структурный анализ кинематического механизмаСтруктурный анализ механизма – процесс исследования структуры механизма, т.е. определение числа звеньев и видов движения, ими совершаемых, числа и вида кинематических пар и так далее. Рассмотрим механизм на рис. 1. Он образован шестью подвижными звеньями и двумя стойками, объединенными в замкнутую кинематическую цепь шестью кинематическими парами. Подвижные звенья обозначим цифрами от 1 до 6, стойки цифрой 0, кинематические пары прописными буквами латинского алфавита. 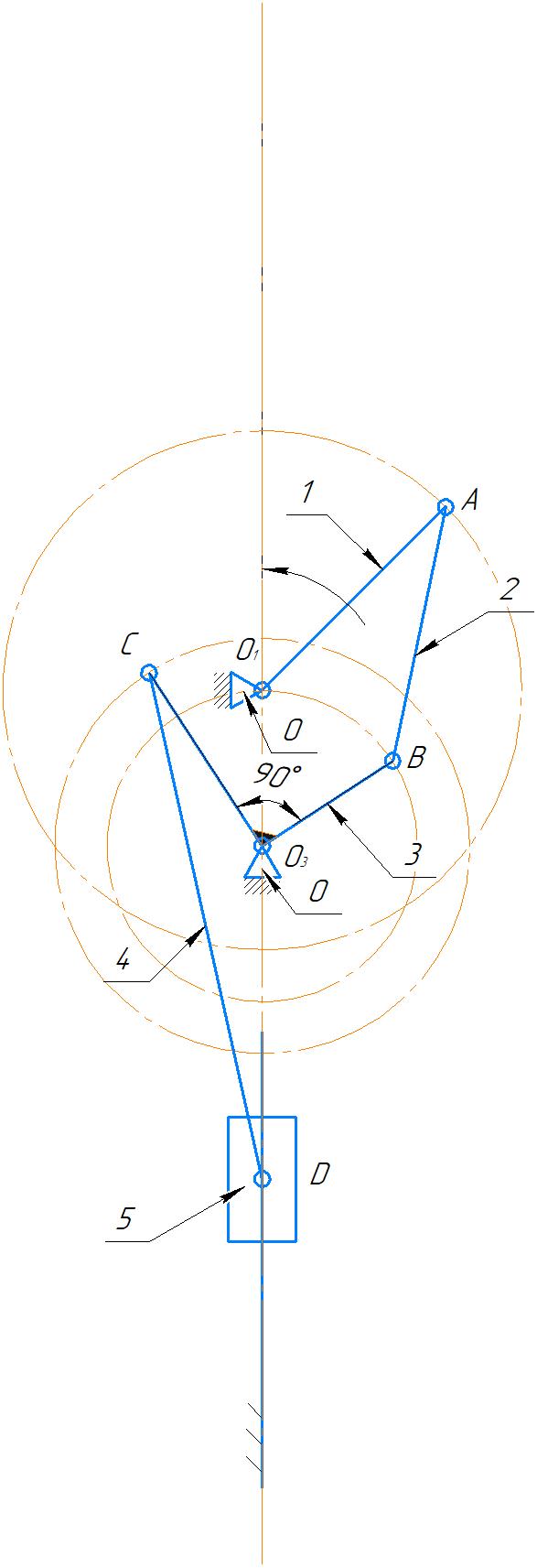 Рис. 1.1 – Кривошипно-ползунный механизм Составим таблицы звеньев (табл. 1.1), кинематических пар (табл. 1.2) и шарниров с подвижными осями (табл. 1.3) механизма. Таблица 1.1 Звенья механизма
Таблица 1.2 Кинематические пары
Таблица 1.3 Шарниры с подвижными осями
Число степеней свободы (подвижность) механизма определим по структурной формуле П.Л. Чебышева для плоских механизмов:  (1.1) (1.1)где n – число подвижных звеньев механизма (п = 5);  – число кинематических пар V класса (= 7); – число кинематических пар V класса (= 7);  - число кинематических пар IV класса (= 0). - число кинематических пар IV класса (= 0). Выполним расчёт по формуле (1) и получим:  (1.2) (1.2)2. Кинематическое исследование механизмаДано: O1A = 0,05 м; AB = 0,05 м; BO3 = 0,03 м; O3C = 0,04 м; CD = 0,1 м; закон движения ведущего звена – равномерное вращательное движение, n = 40 мин-1; положение центров масс звеньев S2, S4 – середины длин звеньев, положение центра масс S5 совпадает с центром ползуна D (рис. 1.1). 2.1 Построение плана положений механизмаПостроение плана положений механизма начинается с построения восьми положений ведущего звена – кривошипа. Отсчет положений осуществляется от начального (нулевого) положения. |