Готовое задание. Готовоезадание(1). 1. Структурный анализ механизма 2 1Схема рычажного механизма 2
 Скачать 159.65 Kb. Скачать 159.65 Kb.
|

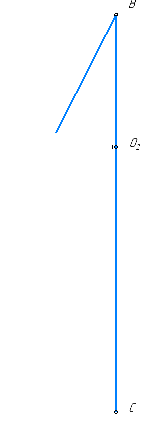
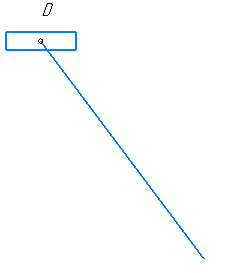
Оглавление1.Структурный анализ механизма 2 1.1Схема рычажного механизма 2 1.2 Классификация кинематических пар 2 1.3 Определение степени подвижности механизма 3 1.4 Разложение механизма на группы Ассура 3 2.4 Построение планов ускорений 3 3. Зубчатый анализ механизма 5 1.Структурный анализ механизма1.1Схема рычажного механизмаСтруктурная схема механизма показана на рисунке 1.1  Рис 1.1- Структурная схема механизма 1.2 Классификация кинематических парНаименование звеньев и кинематических пар представлены в таблицах 1.1 и 1.2 Таблица 1.1- Наименование звеньев
Таблица 1.2-Наименование кинематических пар
1.3 Определение степени подвижности механизмаДля определения числа степеней свободы механизма используем формулу Чебышева: W=3n-2p5-p4, (1.1) Где р5-число кинематических пар пятого класса; p5=7;р4-число кинематических пар четвертого класса р4=0; n-число подвижных звеньев, n=5. W=3x5-2x7=15-14=1 (1.2) Таким образом, число степеней свободы W=1. 1.4 Разложение механизма на группы АссураРезультат разложения механизма на структурные группы представлены в таблице 1.3 Таблица 1.3-Структурные группы механизма
Формула строения механизма 10,1 → 22,3 → 24,5 (1.3) 2.4 Построение планов ускоренийПланом ускорений называют чертеж, на котором в масштабе изображены векторы, равные по модулю и направлению ускорениям различных точек звеньев механизма в данный момент времени. Построение планов ускорений рассмотрим для положения механизма №1 Полагая  =const, определяем ускорение точки А =const, определяем ускорение точки А  Где нормальная составляющая  (2.4) (2.4)А тангенциальная составляющая  (2.5) (2.5)Определим масштабный коэффициент плана ускорений:  (2.6) (2.6)где (ра)- масштабная длина вектора а на плане ускорений. Для определения ускорения точки В используем систему двух векторных уравнений, учитывающих, что точка В одновременно принадлежит втором и третьем звеньям:  (2.7) (2.7)Где  - ускорение точки А - ускорение точки А - нормальное ускорение точки В вокруг А(||АВ) - нормальное ускорение точки В вокруг А(||АВ) - тангенциальное ускорения точки В вокруг А ( - тангенциальное ускорения точки В вокруг А ( АВ) АВ)Для определения ускорения точек С,D используем аналогичную систему двух векторных уравнений   Угловое ускорение шатуна  (2.8) (2.8)Планы ускорений для остальных положений строятся аналогично В таблице 2.3 приведены данные по ускорениям для положений 0,1,2,3
3. Зубчатый анализ механизма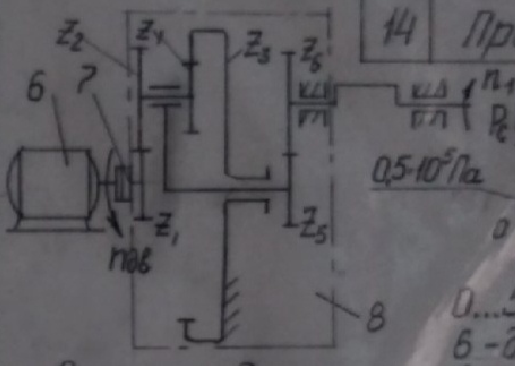 Рис.3.1 Схема отношения зубчатого механизма Разбиваем зубчатый механизм на ступени. 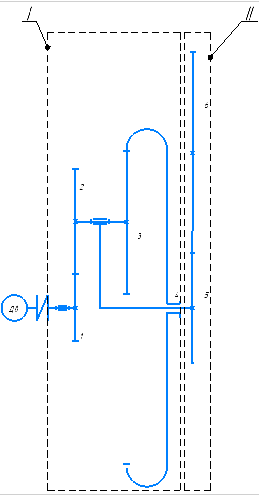 Рис.3.2 Ступени механизма Ступень I, состоящая из зубчатого колеса 1, блока шестерен 2– 3 (двухвенцового сателлита), водила Н и корончатой шестерни 4. Ступень II, состоящая из ступенчатого зубчатого ряда составленного из последовательно соединенных колес 5, 6, причем зубчатое колес 5 конструктивно выполнено как одно целое с водилом Н. | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||