Теория механизмов и машин. Исследование рычажного механизма 3 1 Структурный анализ механизма 4
 Скачать 428.5 Kb. Скачать 428.5 Kb.
|

 Содержание 1 Исследование рычажного механизма 3 1.1 Структурный анализ механизма 4 1.2 Построение плана механизма 4 1.3 Построение планов скоростей механизма 5 1.4 Построение планов ускорений 6 2 Анализ зубчатого механизма 9 2.1 Определение передаточного отношения графическим методом 9 2.2 Определение передаточного отношения аналитическим методом 9 2.3 Проверка выполнения условий соосности, соседства и сборки планетарного механизма 10 3 Расчет маховика 12 Литература 16 Приложение А 17 1 Исследование рычажного механизма Исходные данные - схема 9, lOA=0,2м; XC=0м; YС=-0,5м, lAB=0,35м; lBC=0,55м; lСD=0,4м; YЕ=-0,45м, lDE=0,4м; w1=70с-1, φ=30°, Δφ=45°, против хода часовой стрелки  Рисунок 1 – Схема механизма Требуется выполнить: провести структурный анализ механизма; построить два плана механизмов; для каждого положения плана механизма построить план скоростей и план ускорений; вычислить линейные скорости и ускорения точек механизма, и угловые скорости, и ускорения звеньев механизма; на планах механизма нанести направления угловых скоростей и ускорений звеньев. 1.1 Структурный анализ механизма Определяем степень подвижности. Так как механизм плоский, то применяем формулу П.Л. Чебышева W = 3n – 2P5 – P4, где n – число подвижных звеньев; Р4, Р5 – число кинематических пар соответственно четвертого и пятого классов. n = 5; P5: O, A, B, C, D, Е4,5, Е5,6 P4 = 0 W = 3·5 – 2·7 – 0 = 1. Это значит, что данная кинематическая цепь является механизмом, в котором достаточно иметь одно ведущее звено. Для определения класса механизма разбиваем его на структурные группы, у каждой из которых определяем класс, порядок и вид.  II, 2п, 2в. II, 2п, 1в. механизм 1 класса Формула строения механизма имеет вид I (6,1) ® II (2,3) ® II (4,5). В целом механизм второго класса. Все механизмы второго класса исследуются методом планов. 1.2 Построение плана механизмаОпределяем масштаб для построения плана механизма ml = lOA/OA=0,2/40=0,005м/мм. В принятом масштабе выражаем все остальные геометрические параметры и звенья механизма: ХС=0мм, YС=-100мм, АВ=70мм, ВС=110мм, CD=80мм, YЕ=-90мм, DЕ=80мм. 1.3 Построение планов скоростей механизмаПостроение начинаем с определения линейной скорости точки А, принадлежащей ведущему звену ОА. VA = w1·lOA=70·0,2=14м/с. Направление скорости точки А определится из векторного уравнения где Длина отрезка принимается из условия получения «удобного» масштаба mV. mV = VA/PA =14/70=0,2(м/с)/мм. Далее строим план скоростей для структурной группы, состоящей из звеньев 2, 3 по уравнению где Скорость точки D определяем по теореме подобия из соотношения СB/СD = Рb/Рd =>Рd =Рb·СD/СВ=68∙80/110=49,5мм. Скорость точки Е определяем по уравнению: где Из плана скоростей определяем линейные скорости точек: VB= Pb·mV =13,6м/с; VD= Pd ·mV =10м/с; VЕ= Pе ·mV =13м/с, VBA = ab·mV =2,2м/с; VED= de ·mV=8,2м/с и угловые скорости звеньев w2 = VBA/lAB = 2,2/0,35=6,3 w3 = VB/lBC =13,6/0,55=24,7 w4= VED/lED=8,2/0,4=20,5 Направление угловой скорости звена определится, если вектор относительной скорости двух его точек мысленно перенести с плана скоростей на план механизма в точку, стоящую в индексе при скорости на первом месте. Наносим направления угловых скоростей звеньев на план механизма. Полученные значения сводим в таблицу 1. Таблица 1 – Значения линейных скоростей точек и угловых скоростей звеньев механизма
1.4 Построение планов ускоренийУскорение точки А определяем из векторного уравнения (расчет ведем для первого положения) где аО – абсолютное ускорение точки О, м/с², аО = 0, т.к. точка О неподвижна; аАОn – нормальное ускорение точки А относительно точки О, направлено вдоль звена к центру вращения, аАОn = w1²·lOA = аАОt - касательное ускорение точки А относительно точки О, аАОt = 0, т.к. w1 = const. Определяем масштаб плана ускорений mА = аА/pа =980/98=10 Для определения ускорения точки В составляем два векторных уравнения  где аВАn – нормальное ускорение точки В относительно точки А, направлено вдоль звена АВ к точке А, как центру вращения, аВАn = w2²·lАВ = аВАt - касательное ускорение точки В относительно точки А, направлено перпендикулярно нормальному ускорению аВСn – нормальное ускорение точки В относительно точки С, направлено вдоль звена ВС к точке С аВСn= w3²·lВС = аВСt - касательное ускорение точки В относительно точки С, направлено перпендикулярно нормальному ускорению аnВА = аВАn/mА= 14/10=1,4мм, ПnВС= аВСn/mА =336/10=33,6мм. Ускорение точки D, определяем по теореме подобия из соотношения АB/АD = аb/аd =>аd =аb·АD/АВ =39·80/110=28мм. Ускорение точки Е определяем по уравнению: где Из плана ускорений определяем величины абсолютных ускорений точек и касательных составляющих, которые необходимы для определения угловых ускорений звеньев. аВ=pb·mА=394м/с aBAt=nBАb·mА=633м/с Определяем угловые ускорения звеньев 2, 3 и 4: e2 = aBAt/lAB =633/0,35=1809с-2, e3 = aBCt/lBC =206/0,55=375с-2, e4= аED Для определения направления углового ускорения звена необходимо вектор касательного ускорения мысленно с плана ускорений перенести параллельно самому себе на план механизма в точку, стоящую в индексе при аt на первом месте. Результаты вычислений заносим в таблицу 2. Аналогично ведем построение планов скоростей и ускорений и их вычисления для всех остальных положений планов механизма. Таблица 2 - Значения линейных ускорений точек и угловых ускорений звеньев механизма
2 Анализ зубчатого механизма Исходные данные: z1=43, z2=25, z3=20, z4=48, z5=24, z6=25, z7=31, z8=80. Требуется определить передаточное отношение графическим и аналитическим методом. 2.1 Определение передаточного отношения графическим методом Для определения передаточного отношения графическим методом изображаем заданный механизм в масштабе, приняв произвольное значение модуля. Обозначим на механизме все характерные точки – полюса зацеплений и центры колес. Проводим линию, перпендикулярную осям вращения колес и на нее проецируем все характерные точки. Так как ведущим звеном является колесо 1, то изображаем линейную скорость его конца (точка А) вектором Аа произвольной длины. Соединив точки а и О1, получаем линию распределения линейных скоростей первого колеса. Соединяем т.а с т.В и на продолжении этой линии проецируем т.о2-3. Получили линию распределения линейных скоростей 2 и 3 колёс. Соединив точки о2-3 и ОН , получаем линию распределения линейных скоростей водила. На продолжение этой линии проецируем т. С. Соединяем т. О6. с точкой с получаем линию распределения колёса 6. На продолжении этой линии проецируем точку D. Соединив т. d с т. О7 получим линию распределения для конечного звена колеса 7. Передаточное отношение определится через отрезки S8 и S1  2.2 Определение передаточного отношения аналитическим методом Для определения передаточного отношения аналитическим методом разбиваем весь зубчатый механизм на две части. Первая часть со звеньями 1, 2, 3, 4 - представляют собой ступенчатый ряд, вторая часть со звеньями 5, 6, 7, 8, Н – представляет собой собственно-планетарный механизм. Вычисляем относительную ошибку  2.3 Проверка выполнения условий соосности, соседства и сборки планетарного механизма Условие соосности представляет равенство межцентровых расстояний пар зубчатых колеc r5 + r6 = r8 – r7 или z5 + z6 = z8 – z7, 24+25=80-31 49=49. Условие соосности выполняется. Условие соседства определяет возможность размещения всех сателлитов по окружности их центров без задевания друг за друга. где k - число сателлитов. При k=3, 0,866>0,653. Условие соседства выполняется Условие сборки определяет возможность одновременного зацепления всех сателлитов с центральным колесом. Для данного механизма условие сборки выполняется при выполнении условия соосности. Таким образом, планетарная часть заданного зубчатого механизма удовлетворяет всем требованиям проектирования. 3 Расчет маховика Исходные данные: lОА=0,18м, lАВ=0,4м, lAS=0,13м, d=0,09м, w1=80с-1, J1 = 0,012кг∙м2, J2=0,019кг∙м2, m2=2,6кг, m3=2,6кг, d=0,22, Pimax = 320000 Па.  Рисунок 3.1 - Схема механизма Требуется определить момент инерции маховика по методу избыточных работ, рассчитать геометрические параметры маховика, его массу и вычертить эскиз. Строим план механизма при произвольном положении кривошипа в масштабе ml = lOA/OA=0,18/50=0,0036м/мм. Тогда АВ=111мм, AS=36мм Строим восемь совмещенных планов механизма (через 45° угла поворота кривошипа). Поверх их накладываем повернутые на 90° планы скоростей в масштабе mV = ml×w1 = 0,0036∙80=0,288м/с/мм. Строим индикаторную диаграмму и определяем её масштаб mPi = pimax/ypimax=320000/200=1600Па/мм, где yмах - максимальная ордината индикаторной диаграммы, мм. Проецируя крайние точки диаграммы вниз, на оси абсцисс получаем точки 1, 5'. Из точки 1 под произвольным углом проводим прямую и откладываем на ней отрезок 1-5, равный ходу ползуна (на плане механизма), откладываем на нем промежуточные точки 2, 3, 4, 6, 7, 8. Соединив точки 5 и 5', получаем масштабный треугольник, используя который, определяем значения индикаторного давления для различных положений угла поворота кривошипа. Из планов механизма, повернутых планов скоростей и индикаторной диаграммы составляем таблицу значений исходных данных для расчета на компьютере. Таблица 3 – Исходные данные для расчета
где X = Pbi, H = aibi – отрезки с планов скоростей в миллиметрах; aisi - расстояния расположения точек si, находим по теореме подобия aisi = aibi∙ AS / АВ; S = Psi – расстояния между точками P и si с плана скоростей в миллиметрах; Дополнительно для расчета используем данные: ml=0,0036 м/мм - масштаб плана механизма; w1=80с-1 - угловая скорость кривошипа; d=0,069м - диаметр поршня; J1=0,012кг×м2 - момент инерции кривошипа; J2=0,019кг×м2 - момент инерции шатуна; d=0,22 - коэффициент неравномерности; m2=2,6кг - масса шатуна; m3=2,6кг - масса поршня. Рассчитываем на компьютере значения приведенного момента движущих сил Мпр и кинетической энергии звеньев механизма Тзв по формулам  Результаты расчета представлены в приложении А. По результатам расчетов строим график приведенного момента от движущих сил в функции угла поворота кривошипа в масштабах: mМпр = Мпрмах/уМпрмах = 330,5/110=3Н∙м/мм; mj = j/xj = 2p/160 = 0,0393 рад/мм. Принимаем условие, что при такте расширения совершается полезная paбота, поэтому график Мпр (φ) для первых четырех положений располагается выше оси абсцисс, а для остальных четырех - ниже. Графически интегрируя график Мпр=Мпр(φ) получаем график работы движущих сил Адв=Адв(φ). При этом произвольно принимаем расстояние от начала координат до полюса интегрирования h=70 мм. Учитывая, что при решении задачи расчета маховика рассматривается цикл установившегося неравновесного движения, график работы сил полезного сопротивления Ас = Ас(φ) получаем в виде отрезка, соединяющего начало и конец графика работы движущих сил. Масштаб полученных графиков определится: mА = mМпр×mj×h = 3∙0,0393∙70=8,25Дж/мм. График изменения кинетической энергии - ∆Т = ∆Т(j) получаем как разность ординат графиков Адв(j) и Апс(j), т.е ∆Т=Адв–Апс. В этой же системе координат по результатам расчетов вычерчиваем график изменения кинетической энергии звеньев механизма – Тзв=Тзв(j) с учетом mТзв=mТ=mА. Графически вычитая из ординат графика ∆Т=∆Т(j) ординаты графика Тзв=Тзв(j) получаем график изменения энергии маховика Тм=∆Т–Тзв. Проекции точек, соответствующих максимальному и минимальному значениям Тм, на ось ординат дадут отрезок (cd), по которому определяем момент инерции маховика JМ = cd×mT/d×w12 =64∙8,25/(0,22∙802)=0,375кг×м2. Диаметр обода маховика De определяем из условия, что для стальных маховиков окружная скорость не должна превышать 110 м/с Dе < 2Vд/w1 =2∙110/80=2,75м. Из конструктивных соображений принимаем диаметр Dе=0,40м. Внутренний и внешний диаметры обода маховика определяем по выражениям Di = 0,85×De = 0,85∙0,4=0,34м, Dcp = (De + Di)/2 = (0,4+0,34)/2=0,37м. Определяем массу маховика и ширину его обода m = 4JM/Dcp2 = 4∙0,375/0,372 =11кг, b = 4×m/p×r×(De2 – Di2) = 4∙11/(3,14∙7800(0,42 - 0,342))=0,040м, где r = 7800 кг/м - плотность материала. Вычерчиваем эскиз маховика. Курсовой проект выполнил: __________________ Козлов М.А. Дата, подпись Литература1 Овчинников В.А. Курсовое проектирование по теории механизмов и машин. – Киров: Вятская ГСХА, 2000. – 173 с. 2 Овчинников В.А. Теория механизмов и машин. Курс лекций: Учебное пособие. – Киров: Вятская ГСХА, 2008. – 231 с. Приложение А (обязательное) Результаты расчета маховика 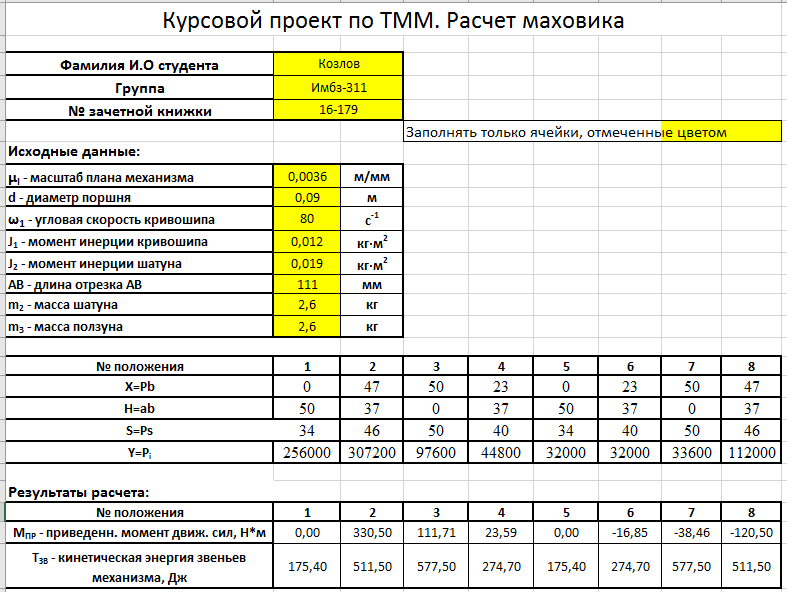 | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||