|
|
Расчет электропривода кран балки участка токарного цеха. курсач Селиверстов. 1. Технологическая характеристика 3 Кинематическая характеристика 6
Содержание
Введение 2
1.Технологическая характеристика 3
2.Кинематическая характеристика 6
3.Механическая характеристика 8
4.Нагрузочная характеристика 16
5.Энергетическая диаграмма 19
6.Выбор редуктора 24
7.Выбор двигателя 25
8.Инерционная характеристика 30
Заключение 32
Литература 33
Введение
Электрификация сельского хозяйства - составная и неразрывная часть общего плана электрификации всей нашей страны. Народнохозяйственное значение проблемы электрификации сельскохозяйственного производства и объективная необходимость ее осуществления определяются основными задачами по увеличению производства продукции и производительности труда. Рост производительности труда требует более широкого внедрения электропривода и электрической энергии в самых разнообразных ее формах в технику и технологию, организацию и управление сельскохозяйственным производством.
Широкое внедрение электропривода коренным образом изменяет условия работы: повышает производительность, улучшает качество продукции и облегчает труд рабочего. При этом повышаются требования к надежности выполнения электрифицированных технологических процессов. Обеспечение этих требований связано с существенными затратами трудовых, материально-технических, финансовых ресурсов. Проблема обеспечения высоких показателей надежности электроустановок при одновременном снижении затрат на их эксплуатацию имеет важное народно-хозяйственное значение. Ее решение осуществляется на стадии проектирования, изготовления и эксплуатации электроустановок.
Большое внимание уделяется особенностям эксплуатации электроустановок, анализу причин, которые приводят к снижению их надежности. Знание обслуживающим персоналом конкретных условий эксплуатации каждой электроустановки, позволяют своевременно принимать меры по устранению или уменьшения их вредного воздействия.
Разнообразие сельскохозяйственных машин, условия и особенности их работы, характер и вид нагрузок, наличие различных технологий выдвигают ряд требований к выбору электропривода.
Технологическая характеристика
Данные к пояснительной записке
-
Электропривод кран-балки
|
Масса поднимаемого груза
|
m
|
кг
|
3000
|
Длина цеха
|
LЦ
|
м
|
40
|
Среднее число циклов в час
|
Nц
|
шт.
|
27
|
Кран-балка предназначена для работы в ремонтно-механической мастерской. Она состоит из балки 2, передвигаемой вдоль цеха длиной 40 метров, и тельфера 1 служащего для подъема, опускания и поперечного перемещения груза наибольшей массой 3000 кг. Масса балки 3000 кг; масса тельфера 1000 кг; максимальная высота подъёма груза 7,5 метров, длина пролёта балки LБ = 9 м, диаметр цапф колёс балки и тельфера 60 мм, коэффициент трения качения колёс балки fб = 0,05, тельфера 0,03, коэффициент трения в цапфах 0,015; коэффициент, учитывающий дополнительные сопротивления в ребордах колёс, торцах ступиц и т.д. - 2,5.
Привод механизма передвижения балки, подъёма груза и передвижения тельфера осуществляется от отдельных электродвигателей через редукторы. Среднее число циклов в час -10 при средней длине перемещения тельфера и балки, что соответствует повторно-кратковременному режиму работы S3. Спуск груза производиться в режиме сверх синхронного торможения. Питание энергией двигателей производиться от троллейных проводов. Пусковая и часть защитной аппаратуры установлены на кран-балке.
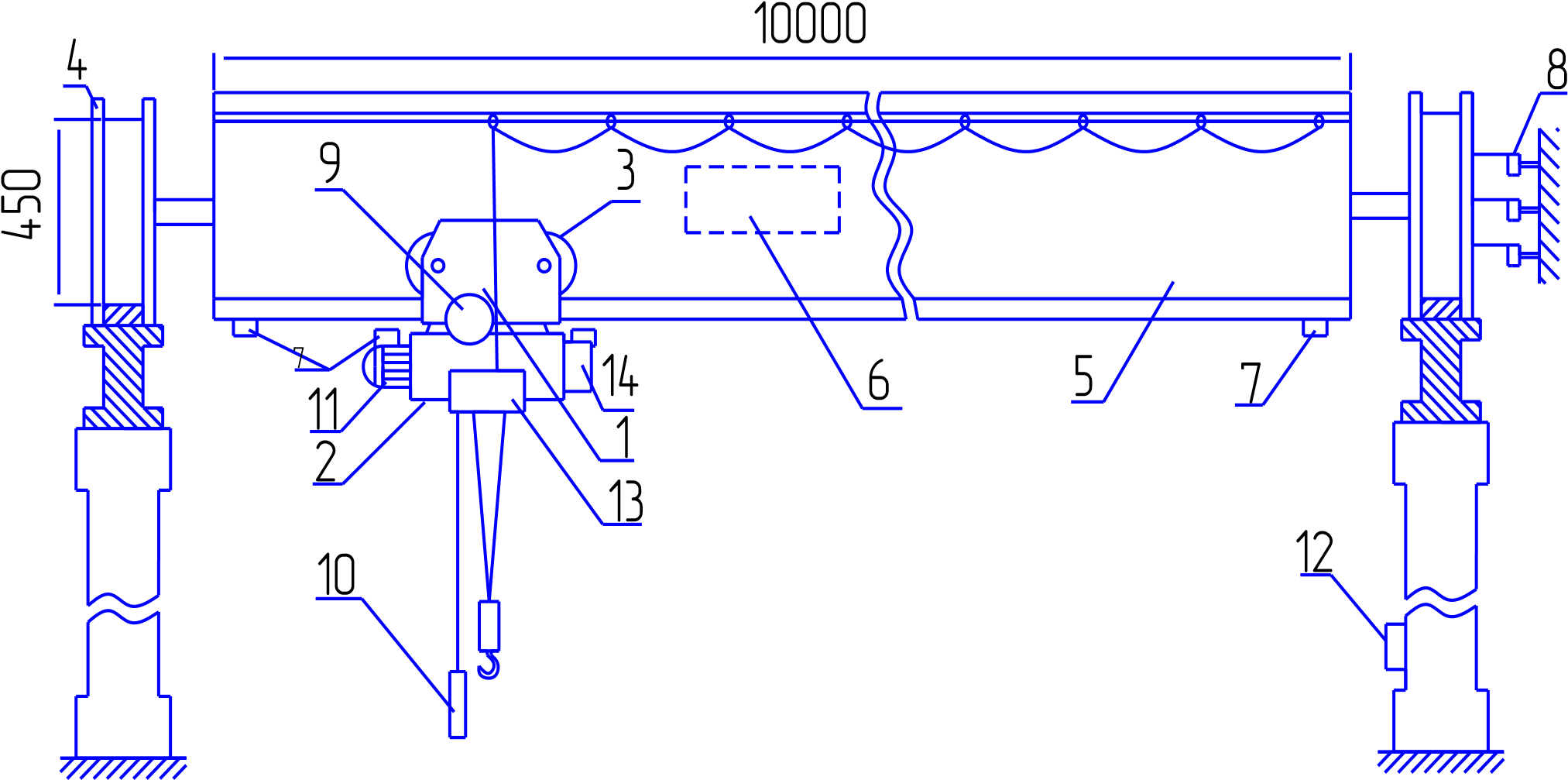
1 –тельфер, 2 – барабан тельфера, 3 – ходовое колесо тельфера, 4 – ходовое колесо балки 5 – балка, 6 – электропривод механизма передвижения балки, 7 – конечный выключатель, 8 – токосъемники и троллейные провода, 9 –электропривод механизма передвижения тельфера, 10 – пост управления, 11 – электродвигатель механизма подъема, 12 – автоматический выключатель, 14 – электромагнитный тормоз.
Рисунок 1 - Схема устройства кран-балки
Анализ технологической схемы позволяет сделать следующие выводы:
электропривод нужен нерегулируемый;
кран-балка работает в сухом отапливаемом помещении;
кран-балка работает с постоянной нагрузкой;
для привода необходимо использовать асинхронные двигатели с короткозамкнутым ротором;
Кинематическая характеристика
Кинематическая характеристика показывает последовательность передачи движения от двигателя к рабочим органам машины и изображается в виде схемы. Она даёт сведения о характере движения, величине передаточных отношении, угловой и линейной скорости, позволяет рассчитывать траектории движения и возникающие ускорения движущихся масс машины.
1 – электродвигатель, 2 – тормозная муфта, 3 – редуктор 4 –барабан, 5 – ходовые колеса.
Рисунок 2 – Кинематическая схема механизма подъема(а) и механизма передвижения(б).
Кинематическая характеристика кран-балки заключается в следующем.
Колеса балки и тельфера получают движение от электродвигателя через редуктор.
Скорость подъёма груза 7,8 м/мин; скорость передвижения тельфера 22,2 м/мин, балки- 54,6 м/мин. Диаметр ходовых колёс балки 500 мм, тельфера 250 мм, барабана тельфера 500 мм.
Анализ кинематической схемы показывает, что рабочие органы совершают поступательное движение. Механизмы имеют постоянный момент инерции. Кинематические схемы грузоподъёмного механизма и механизма передвижения имеют зазоры, зубчатые передачи и упругие элементы в виде канатов и промежуточных валов.
Выбираем для привода колёс балки и тельфера двигатель 1500 об/мин, а для привода барабана с учётом его небольшой частоты вращения 1000 об/мин.
Для выбора передаточного отношения редуктора необходимо определить угловую скорость колес балки ωБ и тельфера ωТ и угловую скорость барабана ωБАР по формуле:
 , , 
где V – линейная скорость движения балки VБ, тельфера VТ и подъёма груза VГР, м/с; r - радиусы ходовых колёс балки, тельфера и барабана, м.
𝑉б = 
𝑉т=
𝑉гр

Найдём синхронную угловую скорость двигателей привода колёс балки и тельфера и привода барабана по формуле:
𝜔дв (2) (2)
𝜔дв рад⁄с рад⁄с
𝜔дв  рад⁄с рад⁄с
𝜔дв рад⁄с рад⁄с
Определим общее передаточное число для редукторов балки, тельфера и барабана:

𝑖б = = =  =43,15 =43,15
𝑖т = = = =53,06 =53,06
𝑖гр = = = =201,38 =201,38
Механическая характеристика
Механическая характеристика представляет собой зависимость между моментом сопротивления и угловой скоростью. Она необходима для анализа переходных процессов, определения возможности пуска и устойчивой работы электропривода, построения нагрузочной диаграммы привода при пуске и обоснования способа регулирования скорости приводного двигателя.
Механическая характеристика описывается выражением 1.7, х=0 –для транспортеров и других механизмов с постоянным моментом сопротивления.
Мс = Мсн,
Момент трогания рекомендуется взять:
Мтр = (1,1…1,2)Мсн.
Значение Мс определяем исходя из анализа действующих усилий Fс при перемещении кран-балки или тельфера по направляющим:
Mc H∙м (4) H∙м (4)
где V – линейная скорость движения балки VБ или тельфера VТ, м/с; ωдв –
угловая скорость двигателя, рад/с; ηпер = 0,98 – КПД передачи (для кран-балки и тельфера).
Расчёт механической характеристики кран – балки.
Величина суммарного усилия под нагрузкой при пуске для механизма передвижения:
FС=F1+ F2 + F3;
где F1- усилие, необходимое для преодоления сопротивления движению
кран-балки на горизонтальном участке:
F1=9,81• Кр •( mб + mт + mгр)•( fб + μ• dц /2)•1/ rб (5)
где mгр - масса груза, mб - масса балки, mт - масса тельфера, fб = 0,05, fт =0,03 - коэффициент трения качения колёс балки и тельфера, μ = 0,015 - коэффициент трения в цапфах, Кр=2,5 - коэффициент, учитывающий дополнительные сопротивления в ребордах колёс, торцах ступиц и т.д., dц = 0,06 м – диаметр цапф колёс балки и тельфера; rб – радиус колеса балки.
𝐹1 = 9,81 ∙ 2,5 ∙ (3000 + 1000 + 3000)∙(0,05 + 0,015 ∙ 0,06⁄2) ∙ 1⁄0,25=34644,015Н.
F2 - усилие, связанное с преодолением действия ветровой нагрузки:
F2= F0 •S (6)
где F0– удельная ветровая нагрузка; S - площадь, подверженная действию ветра.
В связи с тем что в условиях цеха скоростью ветра можно пренебречь, удельная ветровая нагрузка при этом равна нулю.
F3 - динамическое усилие, связанное с разгоном и торможением кранбалки[1]:
F3=(mб + mт + mгр) •dV/dt (7)
где dV/dt – ускорение при разгоне кран-балки; dV/dt=0,8 м/с2;
𝐹3 = (3000 + 1000 + 3000) ∙ 0,8 = 5600 Н.
𝐹𝑐 = 34644,015+0+5600 = 40244,015 Н.
Mcб H∙м H∙м
Найдем усилия на холостом ходу:
FСХХ=F1ХХ+ F2ХХ + F3ХХ (8)
где F1ХХ = 9,81• Кр •( mб + mт)•( fб + μ• dц /2)•1/ rб, F2ХХ = 0, F3ХХ = (mб + mт) •dV/dt.
𝐹1хх = 9,81 ∙ 2,5 ∙ (3000 + 1000) ∙ (0,05 + 0,015 ∙ 0,06⁄2) ∙ 1⁄0,25 =
= 19796,58 Н.
𝐹3хх = (3000 + 1000) ∙ 0,8 = 3200 Н.
𝐹𝑐хх = 19796,58 + 0 + 3200 = 22996,58 Н.
Найдём момент сопротивления приведённый к валу двигателя в режиме пуска по формуле 4.4. Момент сопротивления на холостом ходу находится аналогично, но без учёта массы груза, т.е.:
Mcxx  (9) (9)
Mcxxб =135,94 H∙м =135,94 H∙м
Найдём момент сопротивления в установившемся режиме под нагрузкой и на холостом ходу, т.е. без учёта динамического усилия, связанного с разгоном и торможением F3. Для этого рассчитаем моменты сопротивления МС' и МСХХ' по формулам 4 и 9, прировняв в них F3 к 0.
Mc’б =204,796 H =204,796 H м м
Mcxx’б =115,03 H∙м =115,03 H∙м
Построим механическую характеристику балки. Из графика видно, что наибольший момент сопротивления будет при трогании кран-балки.
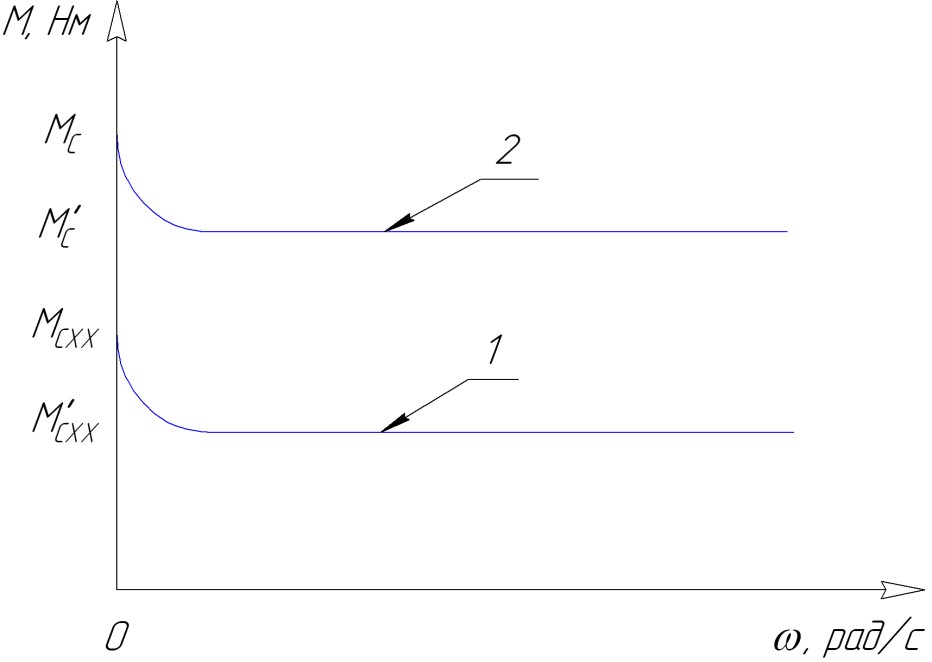
1 – на холостом ходу, 2 – под нагрузкой
Рисунок 3 - Механическая характеристика механизма передвижения кран-балки:
Расчёт механической характеристики тельфера.
Расчёт и построение механической характеристики тельфера производится аналогично предыдущему, но без учёта массы кран-балки mб.
F1=9,81• Кр •( mт + mгр)•( fт + μ• dц /2)•1/ rб
𝐹1 = 9,81 ∙ 2,5 ∙ (1000 + 3000) ∙ (0,03 + 0,015 ∙ 0,06⁄2) ∙ 1⁄0,25 =11948,58Н
F3=( mт + mгр) •dV/dt
где dV/dt – ускорение при разгоне кран-балки; dV/dt=0,8 м/с2; 𝐹3= (1000 + 3000) ∙ 0,8 = 3200 Н.
𝐹𝑐 = 11948,58+0+3200 = 15148,58 Н.
Мст 
Найдем усилия на холостом ходу:
FСХХ=F1ХХ+ F2ХХ + F3ХХ
где F1ХХ = 9,81• Кр • mт•( fт + μ• dц /2)•1/ rб, F2ХХ = 0, F3ХХ = mт •dV/dt.
𝐹1хх = 9,81 ∙ 2,5 ∙ 1000 ∙ (0,03 + 0,015 ∙ 0,06⁄2) ∙ 1⁄0,25 =
= 2987,145 Н.
𝐹3хх = 1000 ∙ 0,8 = 800 Н.
𝐹𝑐хх = 2987,145 + 0 + 800 = 3787,145 Н.
Mcxxт
Mc’т
Mcxx’т
1 – на холостом ходу, 2 – под нагрузкой
Рисунок 4 - Механическая характеристика механизма передвижения тельфера:
Расчёт механической характеристики механизма подъёма (барабана).
Рассчитаем усилия и моменты при подъеме. Величина суммарного усилия под нагрузкой при пуске:
ΣF=F1+ F2 (10)
где F1- усилие подъема в установившемся режиме;
F2 – величина динамическое усилия, возникающее при пуске механизма подъема.
F1=9,81•(mгр + mЗ) (11)
mЗ - масса захватывающего устройства mЗ =50кг;
𝐹1 = 9,81 ∙ (3000 + 50) = 29920,5 Н.
F2=(mгр + mЗ) •dV/dt (12)
где dV/dt – ускорение при подъеме груза, dV/dt=0,2м/с2; 𝐹2= (3000 + 50) ∙ 0,2 = 610 Н.
∑ 𝐹 = 29920,5 + 610 = 30530,5 Н.
Усилия на холостом ходу F1ХХ и F2ХХ рассчитываем по формулам 11 и 12 без учёта массы груза mгр и определяем ΣFХХ аналогично ΣF.
𝐹1хх = 9,81 ∙ 50 = 490,5 Н.
𝐹2хх = 50 ∙ 0,2 = 10 Н.
∑ 𝐹хх = 490,5 + 10 = 500,5 Н.
Определим моменты сопротивления приведённые к валу двигателя при подъёме груза:
В режиме пуска под нагрузкой (учитывается не только усилие подъёма F1, но и усилие, возникающее при пуске двигателя и F2):
где V – скорость подъёма груза, м/с; ωдв – угловая скорость двигателя барабана, рад/с; ηпер = 0,9 – КПД передачи.
Mcгр
В режиме пуска на холостом ходу МСХХ (определяем по формуле 4.13, в которой вместо суммарного усилия под нагрузкой при пуске ∑F используем суммарное усилие на холстом ходу ∑FХХ).
Mcxxгр
В установившемся режиме под нагрузкой МС' (определяем по формуле 4.13 в которой составляющую F2 приравниваем к 0)
Mcгр
В установившемся режиме на холостом ходу МСХХ' (определяем аналогично МСХХ, принимая F2ХХ равным 0)
Mcxxгр
Расчёт механической характеристики механизма опускания груза.
Моменты сопротивления приведённые к валу двигателя при опускании груза определяем аналогично моментам сопротивления при подъёме груза с той лишь разницей, что в формуле 4.13 КПД передачи из знаменателя переходит в числитель.
M𝑐гр 
𝑀𝑐ххгр 
M𝑐гр 
M𝑐ххгр  = 0,55 H м = 0,55 H м
Механическая характеристика механизма подъёма (рисунок 5) строится аналогично механической характеристике кран-балки (рисунок 3) и тельфера
(рисунок 4).
Рисунок 5 - Механическая характеристика механизма подъёма (барабана)
1 – при опускании на холостом ходу, 2 – при подъёме на холостом ходу, 3 – при опускании под нагрузкой, 4 – при подъёме под нагрузкой.
Нагрузочная характеристика
Нагрузочная характеристика рабочей машины представляет собой зависимость усилий или моментов сопротивлений от времени или пути.
При постоянной скорости нагрузочная диаграмма это зависимость приведённого к валу двигателя момента сопротивления от времени. Характер нагрузочной диаграммы машины в значительной степени зависит от технологической и кинематической характеристик.
Таким образом, анализируя технологическую и кинематическую схемы работы кран-балки, рассчитаем и построим нагрузочную диаграмму за один цикл с учётом следующих величин: длина цеха Lц, максимальная высота подъёма груза H и длина пролёта балки Lб.
Время движения и паузы балки
Для построения нагрузочной диаграммы определим время передвижения балки вдоль всего цеха:
tp (14) (14)
𝑡р =  = 43,96 = 43,96
Определим время паузы в работе. Это время, за которое подъемный механизм опустит захватывающее устройство и поднимет груз.
tп  (15) (15)
tp 
На основе данных расчетов строим нагрузочную диаграмму механизма передвижения кран-балки (рисунок 6).
Время движения и паузы тельфера.
Для построения нагрузочной диаграммы определим время передвижения тельфера по балке:
(16)
Определим время паузы в работе. Это время передвижения балки вдоль всего цеха определено выше по выражению 14.
𝑡п = 43,96 с
На основе данных расчетов строим нагрузочную диаграмму механизма передвижения тельфера (рисунок 6).
Время движения и паузы барабана
Для построения нагрузочной диаграммы определим время работы механизма подъёма, которое является суммарным временем подъема груза и опускания (15).
𝑡р = 115,38 с
А временем паузы в этом случае будет время перемещения балки вдоль цеха, определяемое по формуле 14 и время передвижения тельфера по балке определяемое по формуле 16.
𝑡п =43,96+24,32=68,28 с
На основе данных расчетов строим нагрузочную диаграмму механизма подъема (рисунок 6).
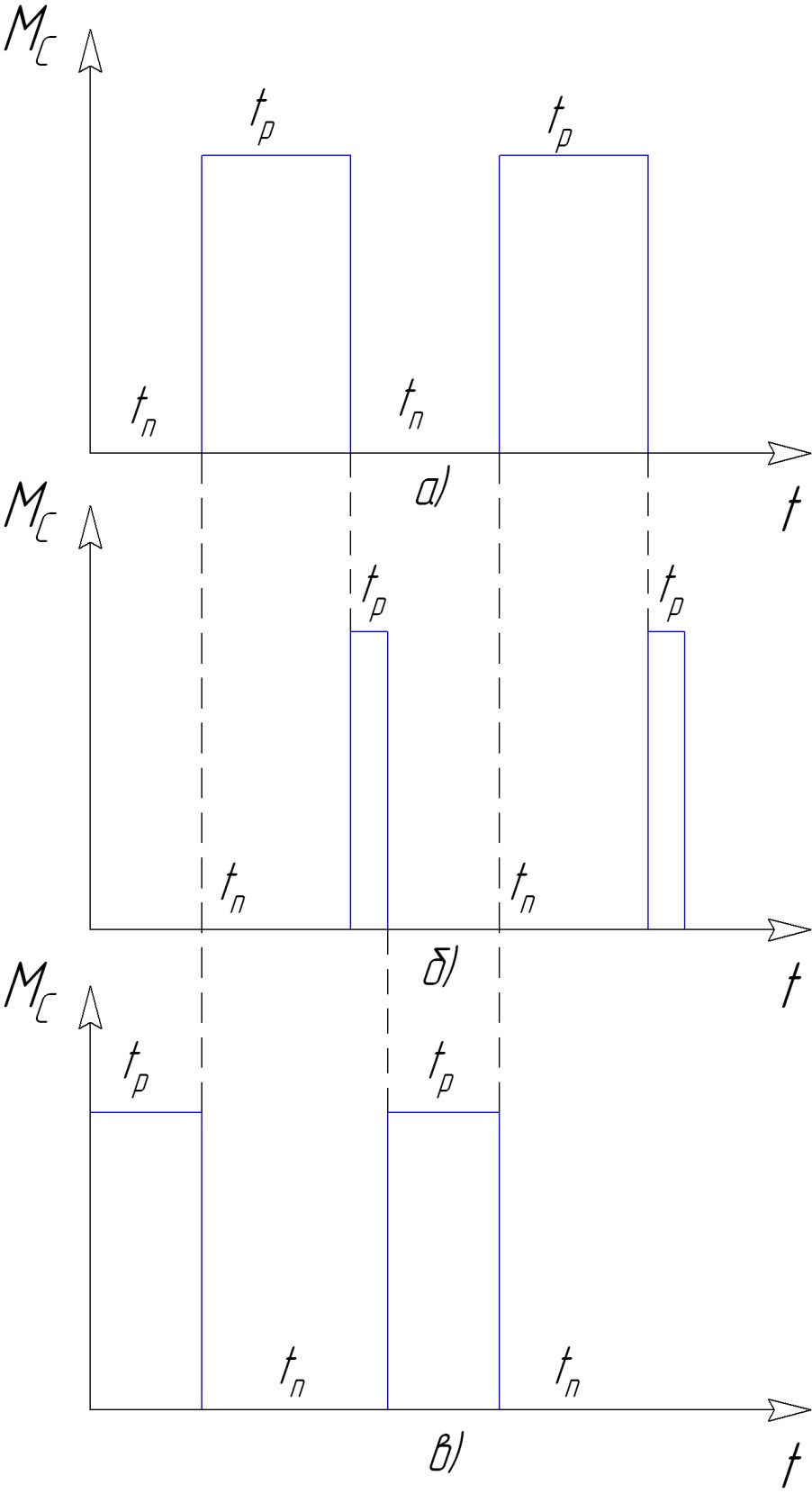
а) механизм передвижения кран-балки, б) тельфер, в) механизм подъёма груза
Рисунок 6 – Нагрузочные характеристики
Энергетическая диаграмма
Энергетическая характеристика показывает распределение энергии, потребляемой как отдельными рабочими узлами, так и всей машиной на холостом ходу и под нагрузкой.
Механизм передвижения балки.
Потребная мощность механизма передвижения балки при разгоне под нагрузкой:
 (17) (17)
𝑃б Вт Вт
где FС - величина суммарного усилия под нагрузкой при пуске для механизма
передвижения, Н.
На холостом ходу:
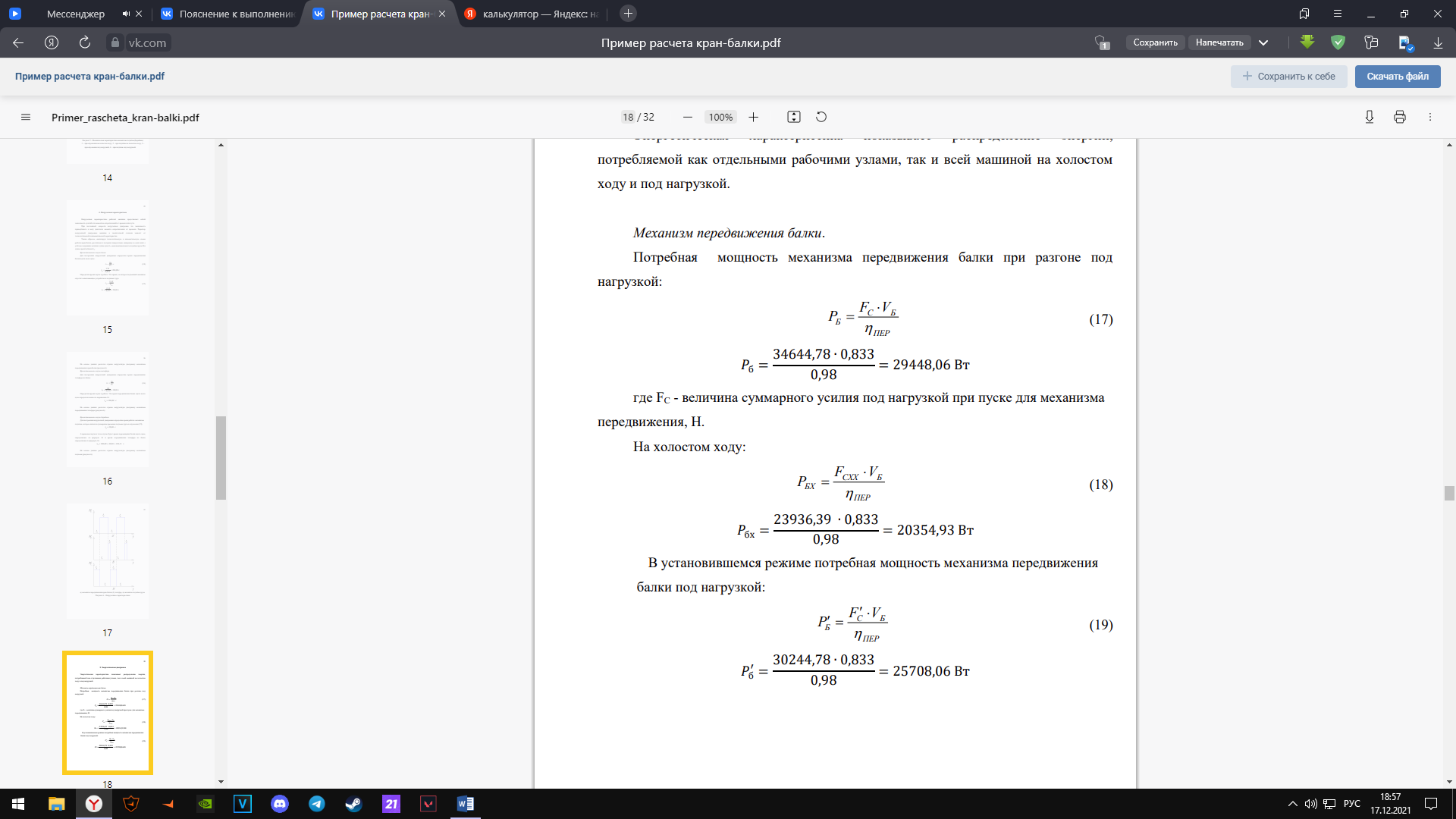 (18) (18)
𝑃бх Вт Вт
В установившемся режиме потребная мощность механизма передвижения балки под нагрузкой:
 (19) (19)
𝑃б’ Вт Вт
На холостом ходу:  (20) (20)
𝑃бх′  Вт Вт
Отношение потребной мощности на холостом ходу и под нагрузкой в при пуске:
 ,% (21) ,% (21)
Таким образом, при максимальной нагрузке разгонная мощность составляет
 , а на перемещение груза (100 , а на перемещение груза (100  ). ).
Отношение потребной мощности на холостом ходу и под нагрузкой в установившемся режиме:  ,% (22) ,% (22)
Аналогично, при максимальной нагрузке мощность холостого хода составляет
 , а на перемещение груза (100 , а на перемещение груза (100  ). ).
Для тельфера и механизма подъёма груза энергетическая характеристика рассчитывается аналогично.
Механизм передвижения тельфера.
Потребная мощность механизма тельфера при разгоне под нагрузкой:
𝑃т
𝑃т 7006,22 Вт 7006,22 Вт
где FС - величина суммарного усилия под нагрузкой при пуске для механизма
тельфера, Н.
На холостом ходу: 𝑃тх 
𝑃тх  1429,84 Вт 1429,84 Вт
В установившемся режиме потребная мощность механизма тельфера под нагрузкой:
𝑃т’
𝑃т’  4511,2 Вт 4511,2 Вт
На холостом ходу: 𝑃тх’ 
𝑃тх’  1228,05 Вт 1228,05 Вт
Отношение потребной мощности на холостом ходу и под нагрузкой в при пуске:
 ,% ,%
Таким образом, при максимальной нагрузке разгонная мощность составляет
, а на перемещение груза (100  79,6%). 79,6%).
Отношение потребной мощности на холостом ходу и под нагрузкой в установившемся режиме:  ,% ,%
Аналогично, при максимальной нагрузке мощность холостого хода составляет
, а на перемещение груза (100 72,76%). 72,76%).
Механизм передвижения груза.
Потребная мощность механизма барабана при разгоне под нагрузкой:
𝑃гр
𝑃гр 4049,9 Вт 4049,9 Вт
где FС - величина суммарного усилия под нагрузкой при пуске для механизма барабана, Н.
На холостом ходу: 𝑃грх
𝑃грх 66,4 Вт 66,4 Вт
В установившемся режиме потребная мощность механизма передвижения барабана под нагрузкой: 𝑃гр’
𝑃гр’ 3969,05 Вт 3969,05 Вт
На холостом ходу: 𝑃грх’ 
𝑃грх’  65,07 Вт 65,07 Вт
Отношение потребной мощности на холостом ходу и под нагрузкой в при пуске:
 ,% ,%
Таким образом, при максимальной нагрузке разгонная мощность составляет
, а на перемещение груза (100  ). ).
Отношение потребной мощности на холостом ходу и под нагрузкой в установившемся режиме:  ,% ,%
Аналогично, при максимальной нагрузке мощность холостого хода составляет
, а на перемещение груза (100  98,36%). 98,36%).
Выбор редуктора
Используя данные энергетической характеристики, выбираем необходимые редукторы с передаточным числом iРГ и передаваемой мощностью на быстроходном
валу Рред. г. (прилож. 3):
для механизма перемещения кран-балки РМ650 при 1500 об/мин;
для тельфера РМ500Б при 1500 об/мин;
для барабана ВК-550-126,78-2 при 1000 об/мин;
Таблица 1 - Выбор редуктора
Тип редуктора
|
Частота вращения
двигателя в об/мин
|
Мощность на быстроходном валу в кВт при передаточном числе
|
КПД
|
40,17
|
РМ650
(Балка)
|
1500
|
7,8 кВт
|
0,98
|
|
|
40,17
|
|
РМ500 (Тельфер)
|
1500
|
7,8 кВт
|
0,98
|
|
|
98,57
|
|
РМ400 (Барабан)
|
1000
|
2,5 кВт
|
0,94
|
Выбор двигателя
Выбор электродвигателя для механизма передвижения кран-балки и тельфера.
Устанавливаемые на мостовых кранах и кран-балках электродвигатели относятся к специальной группе электрических машин, называемых крановыми. Эти двигатели в большинстве своём изготавливают на напряжение 220/380 В. Они имеют повышенный момент пуска, значение которого находиться в пределах 2,6…3,2 номинального. Крановые двигатели имеют изоляцию класса F, выдерживающую нагрев до 155 оС. Выбираем электрический двигатель для механизма передвижения кран-балки, исходя из условий:
Климатическое исполнение и категория размещения У2, УЗ.
По способу защиты от окружающей среды IP44.
По конструктивному исполнению и способу монтажа IM 1081.
По частоте вращения. Nдв=1500 об/мин 5. По роду тока и напряжения: I, Uн=380/220;
6. По мощности.
Выбор мощности электропривода для механизмов подъема и перемещения выполним исходя из анализа их нагрузочной диаграммы. Сначала определим эквивалентный момент за рабочий период, который равен моменту сопротивления под нагрузкой в установившемся режиме:
МЭК = МС (23)
𝑀экб = 𝑀сб =204,796 Н ∙ м.
𝑀экт = 𝑀ст = 36,41 Н ∙ м.
𝑀экгр = 𝑀сгр =42,16 Н ∙ м.
Определим эквивалентную мощность за рабочий период:
РЭК = МЭК · ωДВ (24)
𝑃экб = 𝑀экб ∙ 𝜔дв(б) = 204,796 ∙ 157,08 = 32169,35 Вт
𝑃экт = 𝑀экт ∙ 𝜔дв(т) = 36,41 ∙ 157,08 = 5719,28 Вт
𝑃экгр = 𝑀экгр ∙ 𝜔дв(гр) = 42,16 ∙ 104,72 = 4414,99 Вт
Определим фактическую продолжительность включения:  фак фак
где tЦ = tР + tП – время цикла, равное сумме времени работы и паузы.
𝜀фак(б) =  0,27 0,27
𝜀фак(т) = 0,36 0,36
𝜀фак(гр) =  0,63 0,63
Пересчитаем эквивалентную мощность на стандартную продолжительность включения [3]: 𝑃ст=𝑃эк ∙ K3 ∙  (26) (26)
где kЗ = 1,3 – коэффициент запаса; εСТ – стандартная продолжительность включения, которая выбирается ближайшая из ряда: 0.15, 0.25, 0.4, 0.6.
𝑃ст(б)  =43460,78 Вт =43460,78 Вт
𝑃ст(т) =  =7053,52 Вт =7053,52 Вт
𝑃ст(гр)  =5881,22 Вт =5881,22 Вт
Мощность выбираемого по каталогу двигателя РДВ должна быть больше или равна РСТ:
РДВ ≥ РСТ
𝑃дв(б) > 𝑃ст(б); 43460,78 < 45 кВт
𝑃дв(т) > 𝑃ст(т); 7053,52 < 7,5 кВт
𝑃дв(гр) > 𝑃ст(гр); 5881,22 < 7,5 кВт
Таблица 2 – Выбор двигателя

|

|
При номинальной мощности
|
|

|

|

|

|
КПД, %
|
cosφ
|
𝐼пуск

𝐼ном
|
Мпуск

Мном
|
Ммин

Мном
|
М макс

Мном
|
Синхронная частота вращения 1500 мин-1
|
|
|
АИР315S12
|
45,0
|
1470
|
68,3
|
92,5
|
0,89
|
7,5
|
1,7
|
1,6
|
2,7
|
0,27
|
245
|
AИP132S4
|
7,5
|
1410
|
8,52
|
85,0
|
0,84
|
6,0
|
2,1
|
1,6
|
2,4
|
0,011
|
28,5
|
Синхронная частота вращения 1000мин-1
|
|
|
АИР130М6
|
7,5
|
960
|
12,3
|
85,0
|
0,80
|
7,0
|
2,0
|
1,6
|
2,2
|
0,038
|
68,5
|
Скольжение определим по выражению:
S=1 (27) (27)
где nС – синхронная частота вращения электродвигателя, об/мин.
𝑠б = 1  = 0,02 = 0,02
𝑠т = 1 − 0,06 0,06
𝑠гр =1 −  0,04 0,04
Для проверки электродвигателя на перегрузочную способность определяем скорость, соответствующую мощности РДВ:
𝜔дв= 𝜔c ∙ (1-s)
где ωС – синхронная угловая скорость электродвигателя, рад/с.
𝜔дв(б) = 157,08(1 − 0,02) = 153,94 рад⁄с
𝜔дв(т) = 157,08(1 − 0,06) = 147,65 рад⁄с
𝜔дв(гр) = 104,72(1 − 0,04) = 100,53 рад⁄с
Момент двигателя при этой скорости:
𝑀н
𝑀н(б)  292,32 Н ∙ м. 292,32 Н ∙ м.
𝑀н(т) 50,8 Н ∙ м 50,8 Н ∙ м
𝑀н(гр) 74,6 Н ∙ м 74,6 Н ∙ м
Под перегрузочной способности двигатель пройдёт, если выполнится условие:
МН · mmax · KU ≥ M'C (29)
где КU – коэффициент учитывающий снижение напряжения на зажимах работающего электродвигателя, которое не должно превышать 10%. А так как М ≡ U2, то КU будет равен 0,81; M'C – момент сопротивления в установившемся режиме под нагрузкой;
292,32 ∙ 2,7 ∙ 0,81 = 639,3 > 204,796 Н ∙ м.
50,9 ∙ 2,4 ∙ 0,81 = 98,75> 36,41 Н ∙ м.
74,6 ∙ 2,2 ∙ 0,81 = 132,93 > 42,16 Н ∙ м.
Проверим электродвигатель по условию пуска:
МН · mпуск · K'U ≥ MC + МИЗБ (30)
где КU – коэффициент учитывающий снижение напряжения на зажимах
электродвигателя при пуске, которое не должно превышать 30%. А так как М ≡ U2, то КU будет равен 0,49; MC – момент сопротивления при пуске под нагрузкой; МИЗБ
= 0,2 · M'C – избыточный момент, необходимый для обеспечения пуска.
292,32 ∙ 1,7 ∙ 0,49 = 243,5 > 237,9 + 0,2 ∙ 204,796 = 278,85 Н ∙ м.
50,8 ∙ 2,1 ∙ 0,49 = 52,27 > 36,41+ 0,2 ∙ 36,41 = 43,692 Н ∙ м.
74,6 ∙ 2,0 ∙ 0,49 = 73,108 > 42,16 + 0,2 ∙ 42,16 = 50,592 Н ∙ м.
Инерционная характеристика
Инерционная характеристика представляет собой зависимость момента инерции от времени, углового или линейного пути. Величина момента инерции влияет на время переходных процессов и величину динамических моментов.
Момент инерции балки
J=Jд+Jпер+Jпост, кг∙м2, (31)
где Jд – момент инерции двигателя, кг∙м2; Jпер=0,3∙ Jд – момент инерции передаточного устройства, кг∙м2; Jпост – момент инерции от поступательного движения балки под нагрузкой, определяемый по формуле:
𝐽пост , кг ∙ , кг ∙  дв дв
где mН – суммарная масса балки, тельфера и груза, кг.
𝐽пост  = 0,235 кг ∙ м2 = 0,235 кг ∙ м2
𝐽 =0,27+0,3  +0,235=0,586 кг ∙ м2 +0,235=0,586 кг ∙ м2
Для нахождения момента инерции от поступательного движения балки на холостом ходу J'ПОСТ в выражении 32 при расчёте mН не учитывается масса груза.
𝐽′пост  0,134 кг ∙ м2 0,134 кг ∙ м2
𝐽′ = 0,27 + 0,3 ∙ 0,27 + 0,134 = 0,485 кг ∙ м2
Момент инерции тельфера
Момент инерции тельфера рассчитывается аналогично моменту инерции кранбалки без учёта в суммарной массе mН массы кран-балки и с заменой в формуле 32 скорости балки VБ на скорость тельфера VТ
𝐽пост  0,022 кг ∙ м2 0,022 кг ∙ м2
𝐽 = 0,011 + 0,3 ∙ 0,011 + 0,022 = 0,036 кг ∙ м2
𝐽′пост =  0,005 кг ∙ м2 0,005 кг ∙ м2
𝐽′ = 0,011 + 0,3 ∙ 0,011 + 0,005 = 0,0193 кг ∙ м2
Момент инерции подъемного механизма
Момент инерции подъемного механизма состоит из следующих составляющих:
J=Jд+Jпер+ Jбар+ Jгр, кг∙м2, (33)
где Jд – момент инерции двигателя;
Jпер = 0,2∙Jд – момент инерции передаточного устройства;
Jбар – момент инерции от вращательного движения барабана, определяемый по формуле:
Jбар 
где Rбар – радиус барабана, м; mбар = 50 кг – масса барабана.
𝐽бар 0,000038 кг ∙ м2 0,000038 кг ∙ м2
𝐽гр , кг∙м2 - момент инерции от поступательного движения груза; , кг∙м2 - момент инерции от поступательного движения груза;
𝐽гр  0,00231 кг ∙ м2 0,00231 кг ∙ м2
𝐽 = 0,038 + 0,25 ∙ 0,038 + 0,000038 + 0,00231 =0,049848 ≈ 0,05 кг ∙ м2
Анализ составляющих момента инерции кран балки позволяет сделать вывод о том, что без учета периода пуска он обладает небольшим и практически постоянным приведенным к валу двигателя моментом инерции.
Заключение
Основным преимущества кран-балки, перед другими грузоподъемными механизмами является, то, что груз можно перемещать не только в вертикальном, но и в горизонтальном направлении. Поэтому любой объект с массой допустимой для выбранной кран-балки, может быть не только поднят, но и донесен в указанное место на территории рабочей площадки.
Механизм кран-балки, тельфера, барабана обладает постоянным и небольшим приведенным к валу двигателя моментом инерции.
Результаты расчёта и анализа приводных характеристик позволяют сделать следующие выводы:
Кран – балка, тельфер, барабан работает в сухом отапливаемом помещении;
Привод нужен нерегулируемый, асинхронный;
В кинематической схеме грузоподъёмного механизма и механизма передвижения имеют зазоры, зубчатые передачи и упругие элементы в виде канатов и промежуточных валов;
Режим работы кран-балки,тельфера, барабана повторно-кратковременный, с постоянной нагрузкой
Литература
Аполлонский, С.М. Теоретические основы электротехники. Электромагнитное поле: Учебное пособие / С.М. Аполлонский. - СПб.: Лань, 2018. - 592 c.
Немцов, М.В. Электротехника и электроника: Учебник для студ. образоват. учреждений сред. проф. образования / М.В. Немцов, М.Л. Немцова. - М.: ИЦ Академия, 2017. - 480 c.
Покотило, С.А. Справочник по электротехнике и электронике / С.А. Покотило. - Рн/Д: Феникс, 2018. - 282 c.
Ермуратский, П.В. Электротехника и электроника / П.В. Ермуратский, Г.П. Лычкина, Ю.Б. Минкин. - М.: ДМК Пресс, 2018. - 416 c.
Морозова, Н.Ю. Электротехника и электроника: Учебник для студентов учреждений среднего профессионального образования / Н.Ю. Морозова. - М.: ИЦ Академия, 2017. - 288 c.
|
|
|
 Скачать 0.72 Mb.
Скачать 0.72 Mb.