электрооборудование механизма подъема (перемещения) мостового крана грузоподъемностью….. Эккерман Р.И. Курсовая (1). 1 Технология работы и конструкция мостового крана 5 1 Конструкция мостового крана 5
 Скачать 496.74 Kb. Скачать 496.74 Kb.
|

 СОДЕРЖАНИЕ СОДЕРЖАНИЕВВЕДЕНИЕ 4 1 Технология работы и конструкция мостового крана 5 1.1 Конструкция мостового крана 5 1.2 Кинематические схемы приводов крана 6 2 Требования к электрооборудованию крана 8 2.1 Требования к электроснабжению крана 8 2.2 Основные защиты электрооборудования крана 8 2.3 Требование к электроприводу крана 9 2.4 Режимы работы электрооборудования крана, расчет ПВ 10 3 Расчет мощности электроприводов крана 13 3.1Расчет статических нагрузок и предварительный выбор мощности двигателя подъема 13 3.2 Проверка двигателя подъема на нагрев 16 4. Расчет и выбор мощности двигателей горизонтального перемещения 21 4.1 Расчет мощности привода тележки с проверкой на перегрузочную способность 21 4.2 Расчет мощности привода моста с проверкой на перегрузочную способность 23 5 Выбор преобразователя частоты для привода крана 26 6 Расчет и выбор тормозных устройств крана 33 7 Расчет и выбор кабелей и троллев 36 8 Техническая эксплуатация электрооборудования крана 39 9 Правила ТБ при обслуживании крана 43 Заключение 47 Список использованных источников 48 ВВЕДЕНИЕ Данный курсовой проект содержит проектирование электропривода механизмов повторно-кратковременного цикла режима работы. Тележка совершает возвратно-поступательное движение по рельсовому пути на всю длину моста от одного крайнего положения до другого. За исходное состояние тележки принимается нахождение ее в одном из крайних положений на мосте при поднятом грузе. Из этого положения тележка разгоняется с грузом, движется до противоположного конца моста и там затормаживается. Мост крана вместе с тележкой перемещается на требуемое расстояние и останавливается. Груз с помощью механизма подъема, находящегося на тележке, опускается и отцепляется. Затем поднимается пустой крюк и мост с тележкой, но уже без груза, перемещается в исходное положение и там затормаживается. Опускается пустой крюк, зацепляется груз и осуществляется его подъем. На этом цикл работы механизма передвижения тележки заканчивается. При дальнейшей работе тележки этот цикл повторяется. Следует иметь в виду, что паузой для электропривода механизма передвижения тележки является время работы механизмов подъема крана и перемещение моста. 1 Технология работы и конструкция мостового крана 1.1 Конструкция мостового крана Как правило, такой кран состоит из подкрановых путей с рельсами, балки или моста и грузовой тележки, которая перемещается. Тележка снабжается механизмом подъема груза. Он может быть один или несколько в зависимости от требований производства. Устройство приводится в движение под действием электрического привода. Благодаря этому мостовой кран может поднимать и опускать груз, перемещать тележку и балку. Управление таким краном происходит за счет манипуляций с пульта, который располагается в подвесной кабине или внизу цеха. Монтаж крана осуществляется на крановой эстакаде или с использованием колонн и конструкций помещения. 1.2 Кинематические схемы приводов крана Тележка движется по рельсовому пути на всю длину моста от одного крайнего положения до другого. За начальное состояние тележки принимается нахождение ее в одном из крайних положений на мосте при поднятом грузе. Из этого положения тележка разгоняется с грузом, движется до противоположного конца моста и там останавливается. После остановки тележки цикл передвижения тележки заканчивается. Что касается кинематической схемы, то она представлена на рисунке 1.2, г . 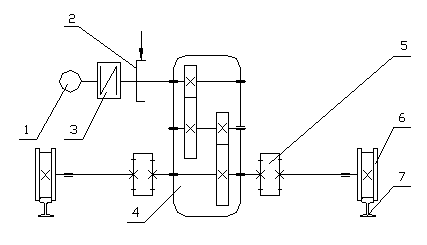 Рис.1.2 - Кинематическая схема механизма передвижения тележки На рис.1.3 изображена кинематическая схема механизма подъема. 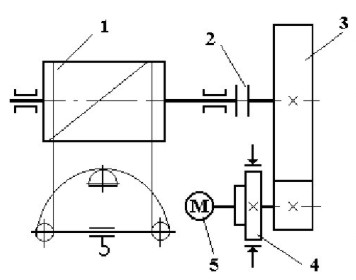 Рис.1.3 Кинематическая схема механизма подъема 1-Барабан; 2-Муфта;3-Редуктор; 4-Тормоз; 5-Электродвигатель На рис.1.4 изображена кинематическая схема механизма передвижения моста. 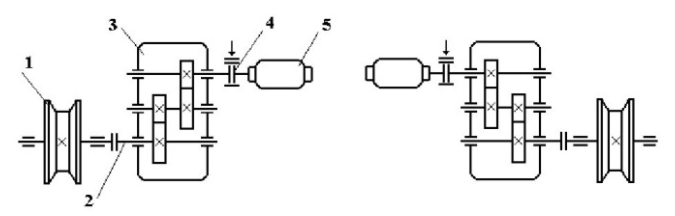 Рис.1.4 Кинематическая схема механизма передвижения моста 2 Требования к электрооборудованию крана 2.1 Требования к электроснабжению мостового крана Электрооборудование крана выполняется и эксплуатируется в соответствии с «Правилами устройств и безопасной эксплуатации электрооборудования кранов». Электроснабжение кранов осуществляется от напряжения не более 500В: 380В переменного тока и 440В постоянного тока. Краны относятся ко II категории потребителей. Краны взрывопожароопасных цехов к I категории потребителей. Питание электрооборудования крана передается по главным (цеховым) троллеям, о подаче питания на них указывают три сигнальные лампы. Двигатели крана запитываются через защитную панель от вспомогательных троллеев или гибким шланговым кабелем. По требованиям Ростехнадзора подача питания на электрооборудование крана осуществляется через рубильник защитной панели, которая отпирается индивидуальной ключ-биркой, которая не может быть выдернута без операции отключения. 2.2 Основные защиты крана - Максимальная токовая защита от сверх перегрузок и токов К.З. осуществляется реле максимального тока кА, автоматические выключатели с электромагнитными расцепителями. Защита от перегрузки на кранах не применяется - Нулевая защита от самозапуска двигателя после отключения и восстановления напряжения. 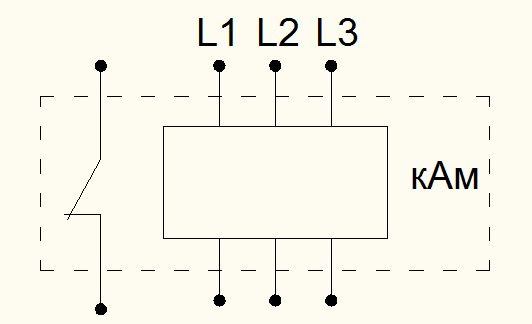 - На всех механизмах крана предусматривается нормально замкнутые тормоза, на кранах взрывопожароопасных цехов два тормоза с разными типами привода. - Для ограничения конечных положений крана применяются конечные выключатели.  - Для защиты цепей управления от токов к.з. применяются плавкие предохранители.  2.3 Требования к электроприводу крана Электропривод мостового крана должен удовлетворять следующим условиям: - Реверсирование привода; - Регулирование угловой скорости ЭП в диапазоне 4:1 (10:1 для специальных кранов); - Высокая жесткость механической характеристики; - Обеспечения достаточного пускового момента для подъема максимального груза и перегрузочной способности двигателя. Данным требованиям удовлетворяют три системы электропривода: - асинхронный короткозамкнутый двигатель серии МТКF, МТКН, нерегулируемая. Применяется на кранах малой грузоподъемности. - асинхронный двигатель с фазным ротором и реостатным регулированием скорости серии МТF, МТН - частотно-регулируемый асинхронный короткозамкнутый электропривод. Применяют при высоких требованиях к диапазону и плавности регулирования скорости. 2.4 Режимы работы электрооборудования крана по нагреву Электрооборудование крана выполняется и эксплуатируется в повторно-кратковременном режиме - S3. В зависимости от продолжительности включения ПВ электрооборудования различают четыре разновидности: Л- легкий, характеризуется продолжительностью включения 10-15%, основная нагрузка 25% от номинала. В таком режиме работают строительно-монтажные краны. С- средний, ПВ 15-25% краны механических и сборных цехов машиностроительных заводов. Т – тяжелый, ПВ= 25-40%, краны производственных цехов и складов с крупносерийным производством. ТВ - весьма тяжелый, ПВ=40-60%, технологические краны металлургического производства. Для определения времени отключения электрооборудования крана рассчитываем время работы привода подъема, тележки и моста.  (2.1) (2.1) (2.2) (2.2) (2.3) (2.3)где vn, vТ, vМ – скорость подъема, тележки, моста, м/с H – высота подъема, м Lм – пролет моста, м Lпп – длина подкрановых путей, м  ,с ,с ,с ,с ,с ,сТак как проектируемый кран находится в механическом цехе тяжелого машиностроения, принимаем режим его работы как тяжелый (Т) ПВ=25-40%. Находим суммарное время включения электроприводов крана в работу составляя нагрузочную диаграмму работы крана. Рассчитываем суммарное время работы крана:  (2.4) (2.4)где  - время подъёма, с - время подъёма, с - время передвижения тележки, с - время передвижения тележки, с - время передвижения моста, с - время передвижения моста, с Суммарное время цикла работы крана:  Вычисляем продолжительность включения приводов подъёма тележки моста в цикле работы крана:    3 ОПРЕДЕЛЕНИЕ МОЩНОСТИ ЭЛЕКТРОПРИВОДА, ВЫБОР ДВИГАТЕЛЯ И УПРАВЛЯЕМОГО ПРЕОБРАЗОВАТЕЛЯ 3.1 Расчет статических нагрузок и предварительный выбор двигателя подъёма Таблица 3.1 – Параметры электрооборудования крана
Статическая нагрузка на двигатель подъема создается силой тяжести. Статический момент сопротивления, действующий при этом на валу двигателя, носит активный характер т.е. может быть положительным и отрицательным. Для определения мощности электродвигателя подъема, необходимо рассчитать статические мощности для каждого периода работы двигателя [6]. Статическая мощность двигателя при подъеме груза, кВт  (3.1) (3.1)где η – КПД механизма подъема g – ускорение свободного падения g= 9,81 м/с2 mг – масса груза, кг. m0 – масса крюка, кг.  Статическая мощность двигателя при тормозном спуске груза кВт.  (3.2). (3.2). Статическая мощность при подъеме крюка без груза.  (3.3). (3.3).где η0 – КПД механизма подъема без нагрузки [2]  (3.4). (3.4).где Кзагр- коэффициент загрузки  (3.5). (3.5). По формуле (3.3)  Статическая мощность двигателя при спуске крюка в силовом режиме  (3.6). (3.6). Рассчитываем эквивалентную мощность, приведенную к стандартной продолжительности отключения 100%.  , кВт (3.10). , кВт (3.10). кВт кВт кВт кВтНоминальную мощность двигателя выбираем по условию Рном≥КзапхРэкв гдеКзап– коэффициент запаса, принимаем Кзап=1,1 Рном≥1,1х38.43=42.3 кВт Исходя из средневзвешенной мощности, выбираем асинхронный двигатель фирмы с фазным ротором серии МНТ-512-6 Мощность номинальная Рном=55 кВт Номинальная скорость вращения: nН =960 об/мин Напряжение: Е2НОМ = 340 В Ток ротора: I2ном =105 А, КПД ηН = 88 %, Момент номинальный: Мном=547 Нм Максимальный вращающий момент Ммах=1630Нм Момент инерции ротора двигателя: J =1,03 кг*м2, Продолжительность включения: ПВ=40%. Электродвигатели предназначены для работы с преобразователями частоты и исключают протекание емкостного тока через подшипники. Асинхронный электродвигатель данной серии оснащен электромагнитным тормозом, независимой вентиляцией. Для контроля температуры в электродвигатели встроены датчики температуры, обеспечивающие защиту от перегрева. 3.2 Проверка двигателя на нагрев Проверка двигателя на нагрев осуществляется по эквивалентному моменту, который рассчитывается с учетом пусковых и тормозных моментов двигателя. Выбор и расчет редуктора [7] Определяем передаточное число редуктора.  (3.11) (3.11)где nном – число оборотов двигателя, об/мин Rб – радиус барабана подъемной лебедки, м. iп – передаточное число полиспаста.  Выбираем стандартный цилиндрический редуктор с передаточным числом ближайшим к расчетному, трехступенчатый редуктор с передаточным числом ip=31.5,табл.19 [1]. Статический момент при подъеме груза, Нм  (3.12) (3.12) Проверку двигателя и выбранного преобразователя частоты на перегрузочную и пусковую способность осуществляем исходя из максимальной перегрузочной способности ПЧ обеспечивать 2Мном двигателя в течении 60 с. по условию [8]. Пусковой момент частотно-регулируемого двигателя: Мпуск=2Мном=2*547=1094 Нм Мпуск>Мпг (3.13) 1094>875Нм Следовательно, ПЧ и двигатель проходи проверку на перегрузочную способность. Статический момент при тормозном спуске груза.  (3.14) (3.14) Статический момент при подъеме пустого крюка.  (3.15) (3.15) Статический момент при силовом спуске крюка.  (3.16) (3.16) Приведенный момент инерции электропривода крана при работе с грузом.  (3.17) (3.17)где К – коэффициент, учитывающий моменты инерции элементов редуктора К=1,1 Jg – инерции двигателя кг*м2 Jм – момент инерции муфты соединяющий двигатель с редуктором кг*м2 ном – угловая скорость двигателя с-1 ном=  с-1 (3.18) с-1 (3.18) Приведенный момент инерции электропривода без груза  кгм2 кгм2Так как преобразователь частоты для кранового привода должен обладать функцией векторного управления, что позволяет двигателю развивать момент необходимый для разгона и торможения ЭП за заданное время. Задаем время пуска и торможения1 с, исходя из допустимого диапазона ускорения привода и снижения износа механических частей электропривода. Рассчитаем пусковые и тормозные моменты двигателя при заданном времени. Пусковой момент необходимый для разгона привода при подъеме груза за заданное время  Тормозной момент двигателя необходимый для остановки при подъеме груза за заданное время  (3.18) (3.18)Пусковой момент необходимый для разгона привода при тормозном спуске груза за заданное время  Знак минус показывает противоположное направление действия момента по отношению к направлению вращения. Тормозной момент двигателя необходимый для остановки при тормозном спуске груза за заданное время  (3.19) (3.19) Пусковой момент необходимый для разгона привода при подъеме пустого крюка за заданное время  (3.20) (3.20) Тормозной момент двигателя необходимый для остановки двигателя при подъеме пустого крюка за заданное время  (3.21) (3.21) Пусковой момент необходимый для разгона привода при силовом спуске пустого крюка за заданное время  Тормозной момент двигателя необходимый для остановки двигателя при силовом спуске пустого крюка за заданное время  Время работы привода подъема с установившейся скоростью tуст=tрп - tпуск—tторм=60-2-2=56 с Эквивалентный момент двигателя с учетом продолжительности включения  (3.22) (3.22) Условия проверки двигателя на нагрев Мном≥Мэкв. 547≥382.5Нм Т.к. условие выполняется, двигатель по нагреву проходит. Предварительно выбранный двигатель прошел проверку по самым тяжелым условиям работы. 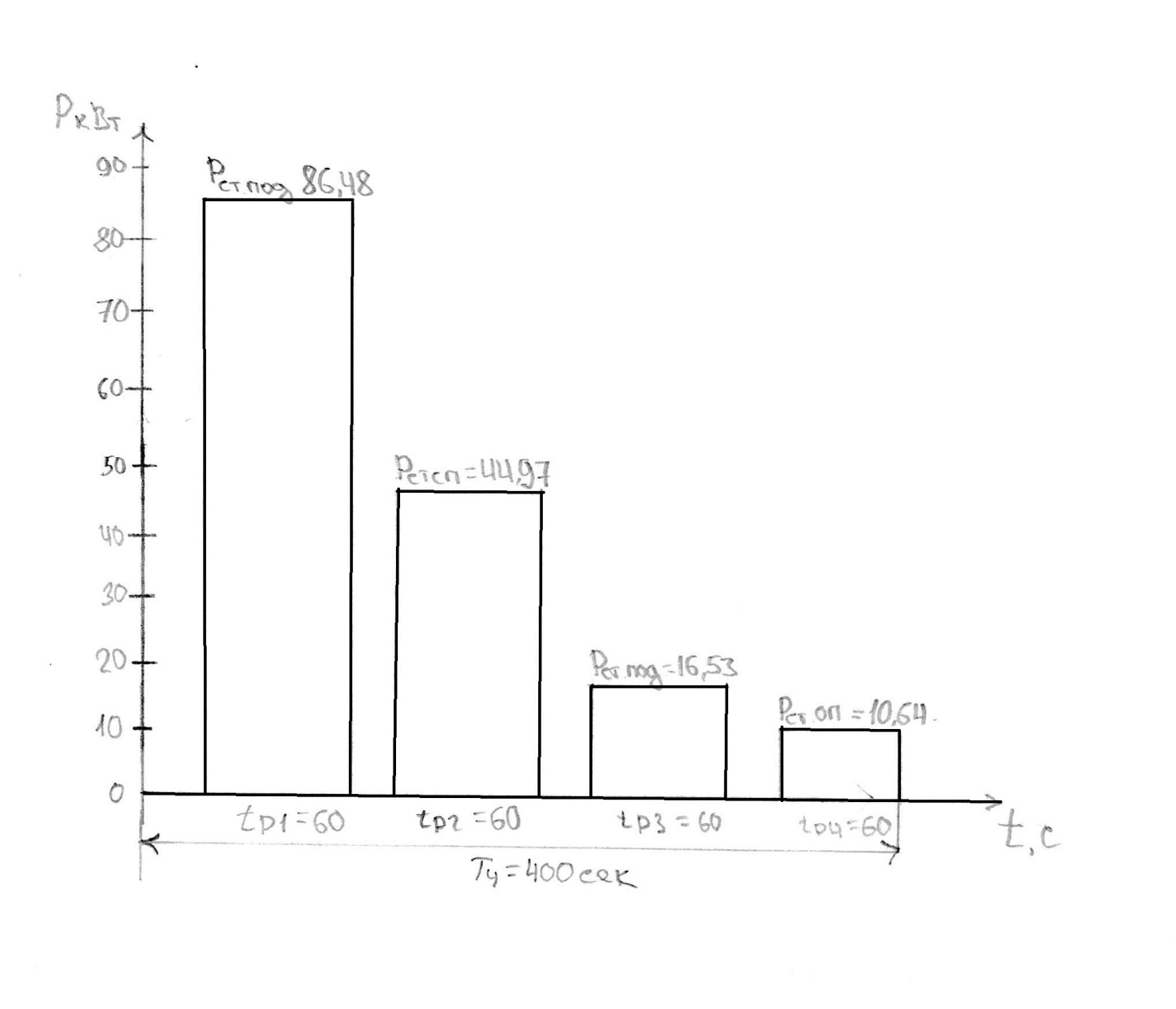 Рисунок 3.1 – Нагрузочная диаграмма привода подъема крана |