Надежность. 1. Задание 1
 Скачать 167.34 Kb. Скачать 167.34 Kb.
|

|
Аналогичные расчёты для  можно провести, записав рекуррентные соотношения. можно провести, записав рекуррентные соотношения.Полином  характеризуется следующими параметрами характеризуется следующими параметрами  . .Соотношения для определе ния  : :  Из этих соотношений вычислим значения (таблица 4.2).Таблица 4.2 — Расчёт для ЛПС–Д
Найдём вероятности возникновения и отсутствия ошибок (таблица 4.3), пользуясь формулами   Полагаем, что  Таблица 4.3 — Вероятности возникновения и отсутствия ошибок
Зависимость вероятностей отсутствия и возникновения ошибок и зависимость количества возникающих ошибок от числа тактов показаны на рисунках 4.2 и 4.3. 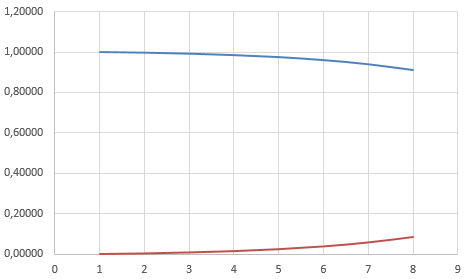 Рисунок 4.2 — Зависимость вероятностей отсутствия и возникновения ошибок 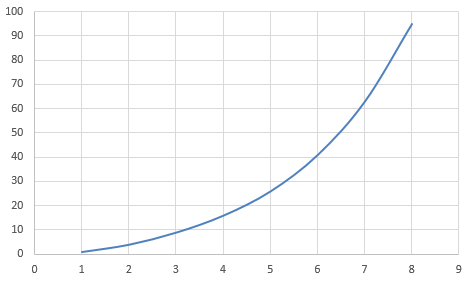 Рисунок 4.3 — Зависимость количества возникающих ошибок от числа тактов Схема ЛПС–С (с вынесенными сумматорами) показана на рисунке 4.2. D D D  Рисунок 4.2 — Схема ЛПС–С Таблица действующих сигналов показана в таблице 4.4. Таблица 4.4 — Таблица действующих сигналов для ЛПС–С
Аналогичные расчёты для можно провести, записав рекуррентные соотношения.Полином характеризуется следующими параметрами .   Соотношения для определе ния : Из этих соотношений вычислим значения (таблица 4.5).Таблица 4.5 — Вероятности возникновения и отсутствия ошибок
Найдём вероятности возникновения и отсутствия ошибок (таблица 4.6). Таблица 4.6 — Вероятности возникновения и отсутствия ошибок
Зависимость вероятностей отсутствия и возникновения ошибок и зависимость количества возникающих ошибок от числа тактов показаны на рисунках 4.5 и 4.6. 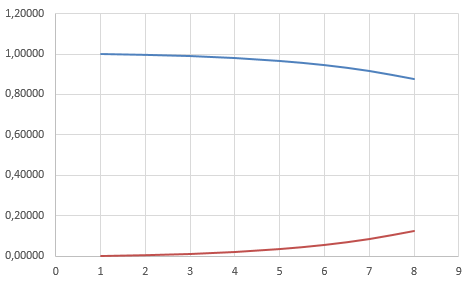 Рисунок 4.5 — Зависимость вероятностей отсутствия и возникновения ошибок 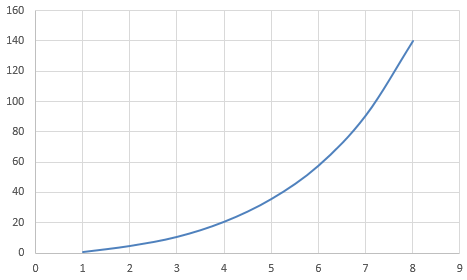 Рисунок 4.6 — Зависимость количества возникающих ошибок от числа тактов Список использованных источников1. Голинкевич, Т.А. Прикладная теория надежности : учеб. для вузов. – М. : Высш. школа. 1989. – 160 с. 2. Строев, О.Я. Анализ надежности работы кодеров и декодеров помехоустойчивых кодов / О.Я Строев // Совершенствование управления перевозочным процессом на ж.д. транспорте за счет новых информационных технологий и технических средств : сб. трудов / под ред. А.Г. Тиличенко. – Хабаровск : Изд-во ДВГУПС, 2004. 3. Строев, О.Я. Энтропийная оценка надежности информационных систем / О.Я Строев // Современные технологии – железнодорожному транспорту и промышленности : сб. трудов / под ред. Е.З. Савина. – Хабаровск: Изд-во ДВГУПС, 2006. – Т. 5. 4. Строев, О.Я. О надежности вычислительных алгоритмов / О.Я. Строев, А.В. Леднев // Инновационные технологии – транспорту и промышленности : сб. трудов / под ред. Ю.А. Давыдова. – Хабаровск : Изд-во ДВГУПС, 2007. – Т. 2. |












