Расписанные билеты, но с КУЧЕЙ опечаток. 6 10 вопросы. Заключение по всем генераторам. 87
 Скачать 4.6 Mb. Скачать 4.6 Mb.
|

14. Принципы автоматического управления. Общие сведения о структурах систем управления. Регуляторы.Принципы автоматического управления. Общие сведения о структурах систем управления. Пример: импульсный понижающий преобразователь для регулирования напряжения на термоэлементе. 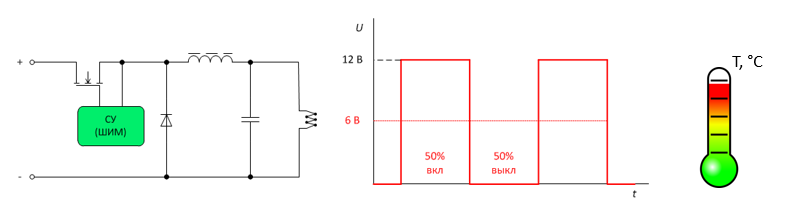 Одним из примеров, на основе которого можно рассмотреть типы систем управления, является импульсный понижающий преобразователь для регулирования напряжения на термоэлементе. На рисунке (слева) представлен DC-DC понижающий преобразователь, управление которым осуществляется по средством ШИМ. На рисунке (справа) представлен типовой сигнал управления ШИМ с коэффициентом заполнения 50% поступающий к транзистору, таким образом, на выходе преобразователя формируется среднее значение выходного напряжения 6 В при 12 В на входе. В простейшем случае функциональная схема управления представлена на рисунке (слева). В случае автоматизации процесса управления функциональная блок-схема претерпевает незначительные изменения (см. на рисунке справа). 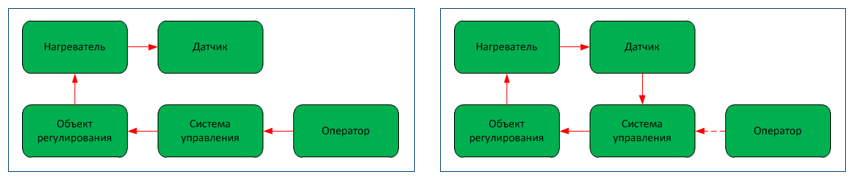 Таким образом, связь объекта управления с управляющим устройством производится в соответствии с двумя основными схемами: разомкнутой и замкнутой. Замкнутая система управления реализуется путем введения обратной связи. В технических системах блок сравнения присутствует в явном виде как устройство, позволяющее вычитать одно значение сигнала из другого. В этом случае имеет место отрицательная обратная связь. В случае положительной обратной связи сигналы суммируются. Простейшая система автоматического регулирования с обратной связью. 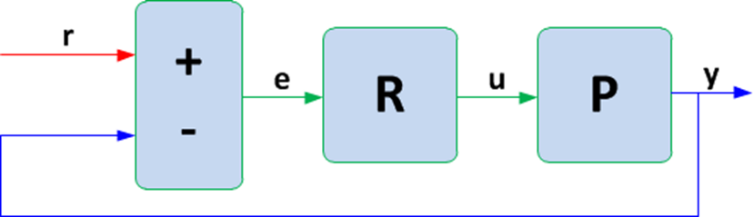 Блок R – регулятор (от слова Regulator), P - объектом регулирования (от слова Process), r - управляющим воздействием или уставкой (reference), e - сигналом рассогласования или ошибки (error), u - выходной величиной регулятора, y - регулируемой величиной. Отрицательная обратная связь обеспечивает подачу на управляемый объект со стороны управляющего устройства команд, направленных на ликвидацию рассогласования действий системы с заданной программой. Положительная обратная связь ведет не к устранению, а к усилению рассогласования. Обратная связь является основой саморегулирования в простых и сложных системах. Простейшая система автоматического регулирования с обратной связью показана на рисунке. Воздействие на объект регулирования. 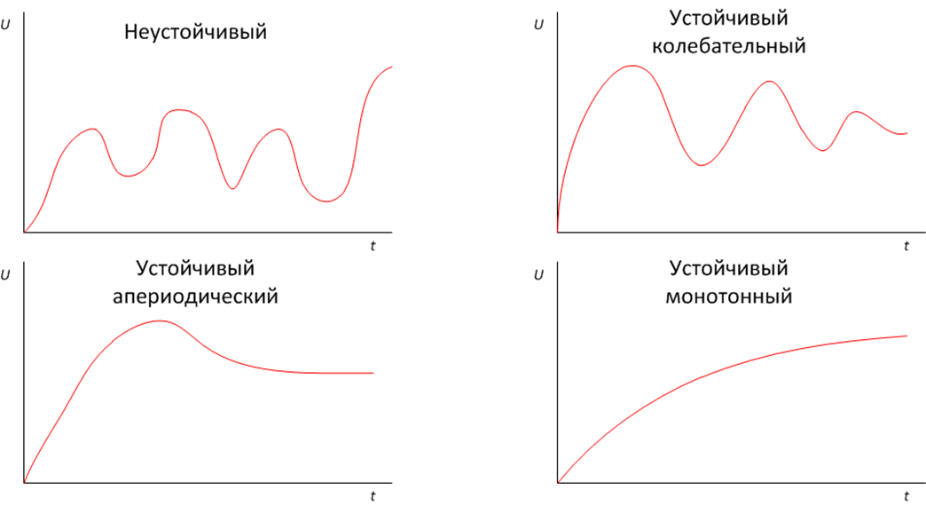 При воздействии на объект регулирования возможны несколько сценариев переходных процессов (реакций объекта регулирования на сигналы системы управления, см. на рисунке). С помощью настройки регулятора, возможно скорректировать переходный процесс так, как необходимо для решения конкретной задачи. Одним из таких регуляторов является ПИД-регулятор. Регуляторы. Пропорционально-интегрально-дифференцирующий (ПИД) регулятор – устройство в управляющем контуре с обратной связью. Используется в системах автоматического управления для формирования управляющего сигнала с целью получения необходимых точности и качества переходного процесса, формирует выходной сигнал, являющийся суммой трех составляющих с разными передаточными характеристиками. Благодаря этому ПИД-регулятор обеспечивает высокое качество регулирования и позволяет оптимизировать управление по отдельным критериям (высокая точность, быстродействие и устойчивость). 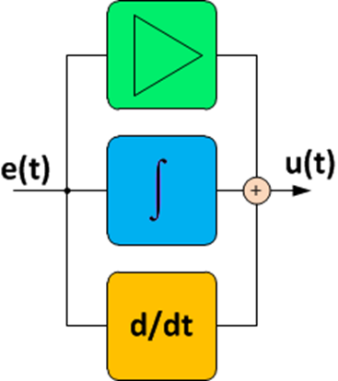 Функциональная схема ПИД-регулятора представлена на рисунке. В формировании выходного сигнала ПИД-регулятора участвуют: Пропорциональная составляющая – значение пропорционально ошибке рассогласования (разности заданного и реального значений регулируемого параметра); Интегрирующая составляющая – интеграл ошибки рассогласования; Дифференцирующая составляющая – производная ошибки рассогласования. Математическая форма записи закона ПИД-регулятора имеет вид:  u(t) – выходной сигнал; P, I, D – пропорциональная, интегральная, дифференциальная составляющие соответственно; KP, KI, KD – коэффициенты пропорционального, интегрального и дифференциального звеньев; e(t) – ошибка рассогласования. При программной реализации ПИД-регулятора вычисления выходного сигнала происходят через равные промежутки времени, т.е. регулятор является дискретным по времени. Составляющие ПИД регулятора. Выходной сигнал ПИД регулятора – это сумма трех составляющих: пропорциональной; интегрирующей; дифференцирующей. Пропорциональная составляющая. 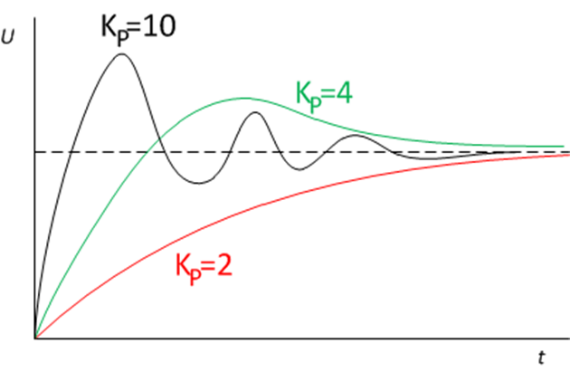 Пропорциональная составляющая не имеет памяти, т.е. значение выходного сигнала не зависит от предыдущего состояния системы. Просто ошибка рассогласования, умноженная на коэффициент, передается на выход. Выходной сигнал компенсирует отклонение регулируемого параметра. Сигнал тем больше, чем больше ошибка рассогласования. При ошибке равной 0, сигнал на выходе тоже равен 0. Иначе говоря, берем значение нужной нам температуры (уставку) и вычитаем из него значение текущей температуры. Получаем рассогласование (невязку). Умножаем полученную невязку на коэффициент и получаем значение мощности, которое и передаем на нагреватель. Но при использовании только пропорциональной составляющей есть два больших минуса – во-первых, эффект от нашего воздействия наступает не моментально, а с запаздыванием, и, во-вторых, пропорциональная составляющая никак не учитывает воздействие окружающей среды на объект. Например, когда мы добились того, чтобы температуры объекта была равна нужному нам значению, невязка стала равна нулю, а вместе с ней и выдаваемая мощность стала нулевой. Но температура не может просто так оставаться постоянной, поскольку происходит теплообмен с окружающей средой и объект охлаждается. Таким образом, при использовании только пропорциональной составляющей температура будет колебаться около нужного нам значения. Пропорциональная составляющая не способна компенсировать ошибку полностью. Это видно из формулы. Выходной сигнал в KP раз больше ошибки. Если ошибка рассогласования равна 0, то и выходной сигнал регулятора равен 0. А тогда и компенсировать нечем. Поэтому в пропорциональных регуляторах всегда существует так называемая статическая ошибка. Уменьшить ее можно за счет увеличения коэффициента KP, но это может привести к снижению устойчивости системы и даже к автоколебаниям. К недостаткам пропорциональных регуляторов следует отнести: - наличие статической ошибки регулирования; - невысокая устойчивость при увеличении коэффициента. Есть весомое преимущество – высокая скорость регулирования. Реакция пропорционального регулятора на ошибку рассогласования ограничена только временем дискретизации системы. Регуляторы, работающие только по пропорциональному закону, применяют редко. Главная задача пропорциональной составляющей в ПИД-регуляторе – повысить быстродействие. Интегрирующая составляющая. С учетом временной дискретности регулятора можно записать следующим образом: 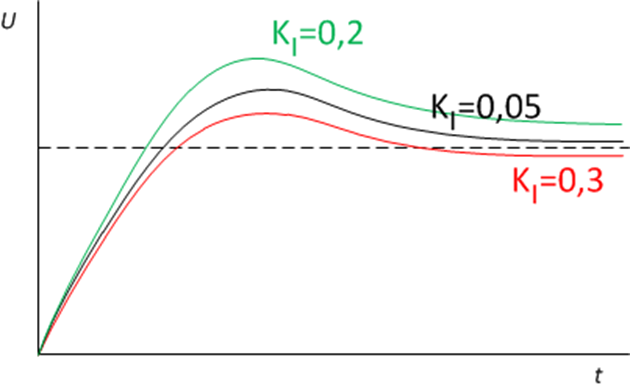 Интегрирующая составляющая пропорциональна интегралу ошибки рассогласования. С учетом временной дискретности регулятора можно записать следующим образом (см. на рисунке), где I(t-1) – значение I предыдущей точке временной дискретизации. Ошибка рассогласования умножается на коэффициент и прибавляется к предыдущему значению интегрирующего звена. Т.е. выходной сигнал все время накапливается и со временем увеличивает свое воздействие на объект. Таким образом, ошибка рассогласования полностью компенсируется даже при малых значениях ошибки и коэффициента KI. В установившемся состоянии выходной сигнал регулятора полностью обеспечивается интегрирующей составляющей. Возвращаемся к нашему примеру. Температура ниже значения уставки, начинаем подогревать. Пока мы нагреваем, значение невязки положительное и накапливается в интегральной составляющей. Когда температура “дошла” до нужного нам значения, пропорциональная составляющая стала равной нулю, а интегральная перестала изменяться, но ее значение не стало равным нулю. Таким образом, благодаря накопленному интегралу мы продолжаем выдавать мощность и нагреватель поддерживает нужную нам температуру, не давая объекту охлаждаться. К недостаткам интегрального регулятора следует отнести: низкое быстродействие; посредственная устойчивость. Достоинство – способность полностью компенсировать ошибку рассогласования при любом коэффициенте усиления. На практике часто используют интегрирующие регуляторы (только интегрирующая составляющая) и пропорционально-интегрирующие (интегрирующая и пропорциональная составляющие). Главная задача интегрирующего звена в ПИД регуляторе – компенсация статической ошибки, обеспечение высокой точности регулирования. Дифференцирующая составляющая.  С учетом временной дискретности регулятора можно записать следующим образом: 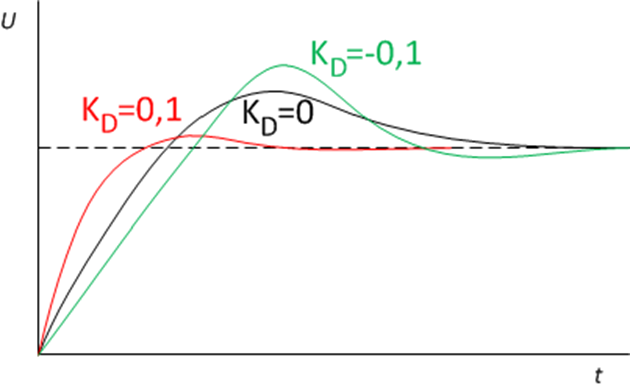 Дифференцирующая составляющая пропорциональна скорости изменения ошибки рассогласования. Своеобразный показатель ускорения ошибки рассогласования. Дифференцирующая составляющая предсказывает отклонения регулируемого параметра в будущем и противодействует этому отклонению. Как правило, она компенсирует запаздывания воздействия регулятора на объект и повышает устойчивость системы. Дифференцирующая составляющая показывает, насколько изменилось значение ошибки рассогласования за одну временную единицу дискретности регулятора. Пусть у нас текущая температура меньше нужного нам значения. Пропорциональная составляющая начинает выдавать мощность и нагревать объект. Дифференциальная составляющая вносит свой вклад в мощность и представляет из себя производную невязки, взятую также с определенным коэффициентом. Температура растет и приближается к нужному значению, а следовательно невязка в предыдущий момент больше текущего значения невязки, а производная отрицательная. Таким образом, дифференциальная составляющая начинает постепенно снижать мощность до того, как температура достигла необходимого значения. Регуляторов, состоящих из единственного дифференцирующего звена, не бывает! Главная задача дифференцирующего звена в ПИД регуляторе – повышение устойчивости. |