Практическая работа. 8. Нарисовать и объяснить упрощенную блоксхему асутп
 Скачать 54.71 Kb. Скачать 54.71 Kb.
|

|
8. Нарисовать и объяснить упрощенную блок-схему АСУТП АСУ ТП являются сложными многоканальными, многофункциональными системами, построенными, как правило, на базе агрегатных средств измерительной и вычислительной техники. В состав АСУ ТП входят 3 основных комплекса технических средств: 1)измерительный; 2)вычислительный; 3)управляющий. Такое разделение не всегда имеет четкие границы, но является удобным при описании и анализе АСУ ТП. 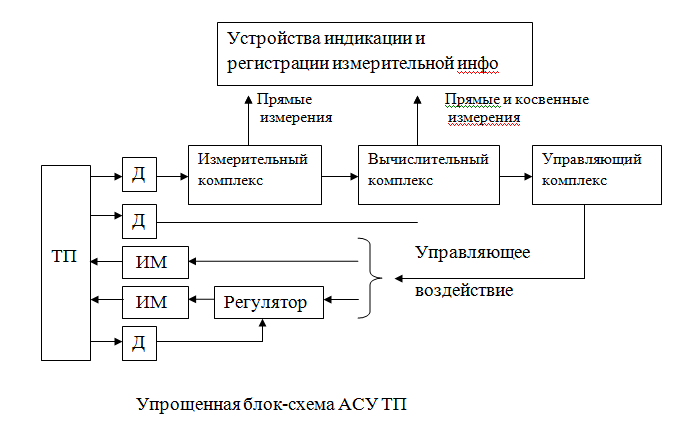 Датчики (ПИП) не включены в состав измерительного комплекса. Они, как правило, монтируются на технологическом оборудовании или являются частью поставляемого оборудования, поэтому метрологические испытания датчиков требуют их демонтажа, что возможно лишь на неработающем объекте. В связи с этим межповерочные интервалы для датчиков выбираются в соответствии с планами работы технологического оборудования. В то же время метрологические испытания измерительного комплекса могут проводиться без нарушения нормального хода технологического процесса. Измерительный комплекс предназначен для измерения непрерывных сигналов, поступающих от датчиков ТП. Его структура предусматривает многократное использование одних и тех же устройств для измерения сигналов от различных датчиков. Основной единицей измерительного комплекса является ИК. 18. Расчет статических МХ для ИК, состоящего из линейных компонентов fi(xi-1)- номинальная функция преобразования каждого компонента ИК, задается виде линейной фу-и вх сигнала xi= fi(xi-1)= Аi xi-1+аi где Аi , аi –мультипликативная и аддитивная составляющии фу-и преобразования, определяющие наклон и смещение фу-и fi В качестве примера берем ИК состоящий из 3 последовательных измерительных компонентов К1(А1,а1) К2(А2,а2) К3(А3,а3) х0 х1 х2 х3 сигнал на вых К1 можно записать виде К1, i=1: х1= f1 (х0)= Этот сигнал явл вх для компонента К2 К2, i=2: х2= f2 (х1)= К3(Кn),i=n=3: у= fn (хn-1)= F0= F1= F2= Fn=1 Мультипликативная составляющ фу-и преобразования канала определяется при j=0 А= Аддитивная составляющая фу-и преобразования канала определяется из выражения тогда в целом для ИК состоящего из n последовательно соединенных линейных компонентов получим у=А х0+а при наличии не случ погрешн заданных отно-но вых i-х блоков ИК абсолютная погрешность ИК в целом составит |