34. Электромагнитный момент развиваемый асинхронной машиной.
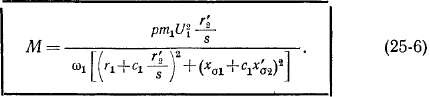
При пользовании единицами системы СИ момент М выражается в ньютон-метрах.
Согласно выражению (25-6), электромагнитный момент при любом заданном значении скольжения пропорционален квадрату приложенного напряжения и тем меньше, чем больше гг и индуктивные сопротивления рассеяния машины . В соответствии с формулой (25-4) при любом заданном s величина М пропорциональна также квадрату вторичного тока.
Согласно равенству (25-6), при s>0 также М > О (режимы двигателя и противовключения)^ а при s < 0 также М <. О (режим генератора
При увеличении скольжения от s = 0 до s = sm момент М растет вместе с увеличением s, а при дальнейшем увеличении скольжения момент М уменьшается, несмотря на увеличение Гг. Необходимо отметить, что на статор электрической машины действует такой же вращающий момент , как и на ротор, но направленный в противоположную сторону.
Момент , действующий на статор, воспринимается деталями й узлами, крепящими машину к фундаменту.
Электромагнитный момент как результат взаимодействия пространственных волн магнитной индукции и токов. В пространственное распределение тока обмотки вдоль окружности якоря было представлено в виде суммы синусоидальных пространственных волн тока разных гармоник.
Возникновение в электрической машине электромагнитных сил и вращающих моментов можно рассматривать как результат взаимодействия указанных волн тока с синусоидальными же волнами распределения индукции магнитного поля вдоль окружности якоря. Отличный от нуля вращающий момент создается взаимодействием пространственных гармоник тока и магнитного поля одинакового порядка, а гармоники разных порядков создают вдоль окружности якоря знакопеременные электромагнитные силы и составлящие момента , суммарная величина которых равна нулю. Полученные соотношения позволяют сделать вывод, что величина максимального момента , во-первых, не зависит, от величины активного сопротивления вторичной цепи, во-вторых, пропорциональна квадрату напряжения, в-третьих, с большой точностью обратно пропорциональна индуктивным сопротивлениям рассеяния и, в-четвертых, в генераторном режиме несколько больше, чем в двигательном.
|
35. Механическая характеристика асинхронной машины. Вид механической характеристики в различных режимах работы машины.
Зависимость частоты вращения ротора от нагрузки (вращающегося момента на валу) называется механической характеристикой асинхронного двигателя (рис. 262, а). При номинальной нагрузке частота вращения для различных двигателей обычно составляет 98—92,5 % частоты
вращения n1 (скольжение sном = 2 – 7,5 %). Чем больше нагрузка, т. е. вращающий момент, который должен развивать двигатель, тем меньше частота вращения ротора. Как показывает кривая
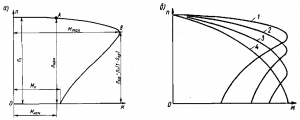
Рис. 262. Механические характеристики асинхронного двигателя: а — естественная; б — при включении пускового реостата
на рис. 262, а, частота вращения асинхронного двигателя лишь незначительно снижается при увеличении нагрузки в диапазоне от нуля до наибольшего ее значения. Поэтому говорят, что такой двигатель обладает жесткой механической характеристикой. Наибольший вращающий момент Mmax двигатель развивает при некоторое скольжении skp, составляющем 10—20%. Отношение Mmax/Mном определяет перегрузочную способность двигателя, а отношение Мп/Мном — его пусковые свойства. Двигатель может устойчиво работать только при обеспечении саморегулирования, т. е. автоматическом установлении равновесия между приложенным к валу моментом нагрузки Мвн и моментом М, развиваемым двигателем. В двигателе с повышенным пусковым моментом естественная механическая характеристика приближается по своей форме к характеристике двигателя с включенным пусковым реостатом.
Виды: При включении в цепь обмоток ротора пускового реостата получаем семейство механических характеристик (рис. 262,б). Характеристика 1 при работе двигателя без пускового реостата называется естественной. Характеристики 2, 3 и 4, получаемые при подключении к обмотке ротора двигателя реостата с сопротивлениями R1п (кривая 2), R2п (кривая 3) и R3п (кривая 4), называют реостатными механическими характеристиками. При включении пускового реостата механическая характеристика становится более мягкой (более крутопадающей), так как увеличивается активное сопротивление цепи ротора R2 и возрастает sкp. При этом уменьшается пусковой ток. Пусковой момент Мп также зависит от R2. Можно так подобрать сопротивление реостата, чтобы пусковой момент Мп был равен наибольшему Мmax.
|
38. Регулирование скорости асинхронной машины изменением скольжения.
Этот способ используют в приводе тех механизмов, где установлены асинхронные двигатели с фазным ротором. Например, в приводе подъемно-транспортных машин . В цепь фазного ротора вводится регулировочный реостат. Увеличение активного сопротивления ротора не влияет на величину критического момента, но увеличивает критическое скольжение (рис. 2.21).
На рис. 2.21 приведены механические характеристики асинхронного двигателя при разных сопротивлениях регулировочного реостата Rр3>Rр2>0, Rр1=0.
Как следует из рис. 2.21 при этом способе можно получить большой диапазон регулирования частоты вращения в сторону понижения. Основные недостатки этого способа:
1 Из-за больших потерь на регулировочном реостате снижается коэффициент полезного действия, т.е. способ неэкономичный.
2 Механическая характеристика асинхронного двигателя с увеличением активного сопротивления ротора становится мягче, т.е. снижается устойчивость работы двигателя.
3 Невозможно плавно регулировать частоту вращения.
Из-за перечисленных недостатков этот способ применяют для кратковременного снижения частоты вращения.
|
. 37. Регулирование скорости асинхронной машины изменением числа пар полосов.
Эти двигатели (многоскоростные) имеют более сложную обмотку статора, позволяющую изменять ее число пар полюсов, и короткозамкнутый ротор. При работе асинхронного двигателя необходимо, чтобы обмотки ротора и статора имели одинаковое число пар полюсов. Только короткозамкнутый ротор способен автоматически приобретать то же число пар полюсов, что и поле статора. Многоскоростные двигатели нашли широкое применение в приводе металлорежущих станков. Нашли применение двух, трех и четырех скоростные двигатели.
На рис. 2.22 показана схема соединения и магнитное поле статора двигателя при последовательном (б) и параллельном (а) соединении полуобмоток.
У двухскоростного двигателя обмотка каждой фазы состоит из двух полуобмоток. Включая их последовательно или параллельно можно в 2 раза изменять число пар полюсов.
У четырехскоростного двигателя на статоре должно размещаться две независимые обмотки с разным числом пар полюсов. Каждая из обмоток позволяет в два раза изменять число пар полюсов. Например, у двигателя, работающего от сети c частотой f=50 Гц, со следующими частотами вращения 3000/1500/1000/500 [об/мин] с помощью одной из обмоток статора можно получить частоту вращения 3000 об/мин и 1500 об/мин (при этом р=1 и р=2). С помощью другой из обмоток можно получить частоту вращения 1000 об/мин и 500 об/мин (при этом р=3 и р=6)..
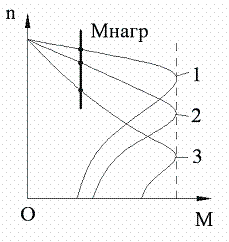
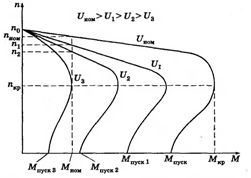
При переключении числа пар полюсов изменяется и магнитный поток в зазоре, что приводит к изменению критического момента Мкр (рис. 2.23 б). Если при изменении числа пар полюсов одновременно изменять и подведенное напряжение, то критический момент может остаться неизменным (рис. 2.23 а). Поэтому при этом способе регулирования могут быть получены два вида семейства механических характеристик (рис. 2.23).
Достоинства этого способа регулирования : сохранение жесткости механических характеристик, высокий К.П.Д. Недостатки: ступенчатое регулирование , большие габариты и большая стоимость двигателя.
|
36. Регулирование скорости асинхронной машины изменением частоты источника питания.
В качестве таких источников питания в настоящее время начали находить применение преобразователи частоты (ПЧ), выполняемые на мощных полупроводниковых приборах – тиристорах. Из уравнения трансформаторной ЭДС U1 = 4,44 w1 k1 f Ф следует, что для сохранения неизменным магнитного потока, т.е. для сохранения перегрузочной способности двигателя, необходимо вместе с частотой изменять и действующее значение подведенного напряжения. При выполнении соотношения  , критический момент не изменяется и получается семейство механически характеристик, представленное на рис. 2.24. , критический момент не изменяется и получается семейство механически характеристик, представленное на рис. 2.24.
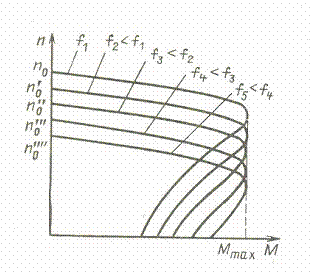
На рис. 2.24 приведены механические характеристики при частотном регулировании .
Достоинства этого способа: плавное регулирование , возможность повышать и понижать частоту вращения, сохранение жесткости механических характеристик, экономичность. Основной недостаток – требуется преобразователь частоты , т.е. дополнительные капитальные вложения.
|
39. Регулирование скорости асинхронной машины изменением сопротивления в цепи статора.
Изменение напряжения, подводимого к обмотке статора асинхронного двигателя, позволяет регулировать скорость с помощью относительно простых технических средств и схем управления. Для этого между сетью переменного тока со стандартным напряжением U1ном и статором электродвигателя включается регулятор напряжения.При регулировании частоты вращения асинхронного двигателя изменением напряжения, подводимого к обмотке статора , критический момент Мкр асинхронного двигателя изменяется пропорционально квадрату подводимого к двигателю напряжения Uрет (рис. 3), а скольжение от Uрег не зависит.
Если момент сопротивления рабочей машины больше пускового момента электродвигателя (Мс > Мпуск), то двигатель не будет вращаться, поэтому необходимо запустить его при номинальном напряжении 17ном или на холостом ходу.
Регулировать частоту вращения короткозамкнутых асинхронных двигателей таким способом можно только при вентиляторном характере нагрузки. Кроме того, должны использоваться специальные электродвигатели с повышенным скольжением. Диапазон регулирования небольшой, до nкр.
|
40. Регулирование скорости асинхронной машины изменением сопротивления в цепи ротора.
Введение резисторов в цепь ротора приводит к увеличению потерь мощности и снижению частоты вращения ротора двигателя за счет увеличения скольжения, поскольку n = nо (1 - s).
Из рис. 1 следует, что при увеличении сопротивления в цепи ротора при том же моменте частота вращения вала двигателя уменьшается.
Жесткость механических характеристик значительно снижается с уменьшением частоты вращения, что ограничивает диапазон регулирования до (2 - 3) : 1. Недостатком этого способа являются значительные потери энергии, которые пропорциональны скольжению. Такое регулирование возможно только для двигателя с фазным ротором.
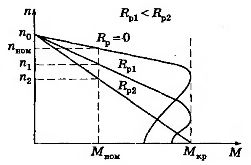
Рис. 1. Механические характеристики асинхронного двигателя с фазным ротором при различных сопротивлениях резисторов, включенных в цепь ротора
|
41. Регулирование скорости асинхронной машины изменением напряжения источника питания.
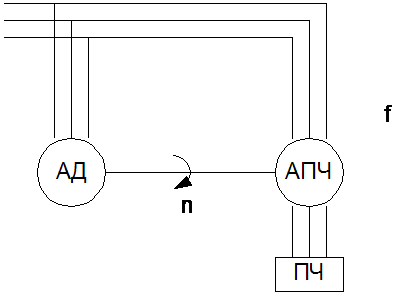
Так как частота вращения магнитного поля статора nо = 60f/р, то регулирование частоты вращения асинхронного двигателя можно производить изменением частоты питающего напряжения.
Принцип частотного метода регулирования скорости асинхронного двигателя заключается в том, что, изменяя частоту питающего напряжения, можно в соответствии с выражением при неизменном числе пар полюсов р изменять угловую скорость nо магнитного поля статора. Этот способ обеспечивает плавное регулирование скорости в широком диапазоне, а механические характеристики обладают высокой жесткостью.
Для получения высоких энергетических показателей асинхронных двигателей (коэффициентов мощности, полезного действия, перегрузочной способности) необходимо одновременно с частотой изменять и подводимое напряжение. Закон изменения напряжения зависит от характера момента нагрузки Мс. При постоянном моменте нагрузки напряжение на статоре должно регулироваться пропорционально частоте.
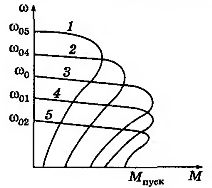
Схема частотного электропривода приведена на рис. 5, а механические характеристики АД при частотном регулировании — на рис. 6.
|
42. Однофазные асинхронные двигатели. Однофазные асинхронные двигатели - машины небольшой мощности, которые по конструктивному исполнению напоминают аналогичные трехфазные электродвигатели с короткозамкнутым ротором.
Однофазные асинхронные двигатели отличаются от трехфазных двигателей устройством статора, где в пазах магнитопровода находится двухфазная обмотка, состоящая из основной, или рабочей, фазы с фазной зоной 120 эл. град и выводами к зажимам с обозначениями С1 и С2, и вспомогательной, или пусковой, фазы с фазной зоной 60 эл. град и выводами к зажимам с обозначениями В1 и В2
Магнитные оси этих фаз обмотки смещены относительно друг друга па угол 0 = 90 эл. град. Одна рабочая фаза, присоединенная к питающей сети переменного напряжения, не может вызвать вращения ротора, так как ток ее возбуждает переменное магнитное поле с неподвижной осью симметрии, характеризуемое гармонически изменяющейся во времени магнитной индукцией.
Это поле можно представить двумя составляющими - одинаковыми круговыми магнитными полями прямой и обратной последовательностей, вращающимися с магнитными индукциями, вращающимися в противоположные стороны с одной и той же скоростью. Однако при предварительном разгоне ротора в необходимом направлении он при включенной рабочей фазе продолжает вращаться в том же направлении.
По этой причине пуск однофазного двигателя начинают с разгона ротора путем нажатия пусковой кнопки, вызывающего возбуждение токов в обеих фазах обмотки статора, которые сдвинуты по фазе на величину, зависящую от параметров фазосдвигающего устройства Z, Повышение надежности эксплуатации однофазных асинхронных двигателей обеспечивают встраиванием в корпус машин центробежного выключателя с размыкающими контактами, присоединенными к зажимам с обозначениями ВЦ и В2, и теплового реле с аналогичными контактами, имеющими выводы с обозначениями РТ и С1
Перемена направления вращения ротора достигается изменением направления тока в одной из фаз обмотки статора при пуске путем переключения пусковой кнопки и перестановки металлической пластины на зажимах электродвигателя или только перестановкой двух аналогичных пластин
|
43. Асинхронные машины специального исполнения. Для перевода AM в генераторный режим необходим источник реактивной мощности для возбуждения. Если генератор работает параллельно сети, то реактивную мощность он будет потреблять из сети. Если генератор работает на автономную нагрузку то для получения реактивной мощности используется батарея конденсаторов подключаемая параллельно обмотки статора
Асинхронный преобразователь частоты
Выполняется на базе AM с фазным ротором Используется для получения переменного тока 100 - 200 Гц (Б)
Использование AM режиме трансформатора.
Фазорегулятор В основе АД с фазным ротором, ротор заторможен. Поворот обеспечивается червячной парой
Трехфазный индукционный регулятор (б) (потенциалорегулятор)
В основе AM с фазным ротором.
Трансформатор с вращающимся полем для преобразования числа фаз или частоты
Их базой является AM с фазным ротором т. к. нет необходимости вращать ротор то воздушный зазор выполняется нулевым.
Для того чтобы получить требуемую частоту это достигается не синусоидальным магнитным потоком. Рабочий режим выбирается с насыщением стали В > 2 Тл.
Для получения нужной частоты выполняются специальные схемы с выделением требуемой частоты (такие преобразователи используются для получения утроенной частоты)
|
44. Конструкция синхронных машин.
Синхронная машина — это электрическая машина переменного тока, частота вращения ротора которой равна частоте вращения магнитного поля в воздушном зазоре.
Синхронная машина состоит из двух основных частей: неподвижной - статора и вращающейся - ротора, и имеет две основные обмотки. Одна обмотка подключается к источнику постоянного тока. Протекающий по этой обмотке ток создает основное магнитное поле машины. Эта обмотка располагается на полюсах и называется обмоткой возбуждения. Иногда у машин небольшой мощности обмотка возбуждения отсутствует, а магнитное поле создается постоянными магнитами. Другая обмотка является обмоткой якоря. В ней индуктируется основная ЭДС машины. Она укладывается в пазы якоря и состоит из одной, двух или трех обмоток фаз. Наибольшее распространение в синхронных машинах нашли трехфазные обмотки якоря.
В синхронных машинах чаще всего находит применение конструкция, при которой, обмотка якоря располагается на статоре, а обмотка возбуждения - на роторе (рис. 1). Синхронные машины небольшой мощности иногда имеют обращенное исполнение, когда обмотка якоря располагается на роторе, а обмотка возбуждения - на полюсах статора (рис. 2). В электромагнитном отношении обе конструкции равноценны.
принцип действия синхронного генератора. Если через обмотку возбуждения протекает постоянный ток, то он создает постоянное во времени магнитное поле с чередующейся полярностью. При вращении полюсов и, следовательно, магнитного поля относительно проводников обмотки якоря в них индуктируются переменные ЭДС, которые, суммируясь, определяют результирующие ЭДС фаз.
|
45. Режимы работы синхронных машин
Синхронная машина может работать автономно в качестве генератора, питающего подключенную к ней нагрузку, или параллельно с сетью, к которой присоединены другие генераторы. При работе параллельно с сетью она может отдавать или потреблять электрическую энергию, т. е. работать генератором или двигателем. При подключении обмотки статора к сети, ток статора создает вращающееся магнитное поле. В результате взаимодействия этого поля с током обмотки возбуждения создается электромагнитный момент. При работе машины в двигательном режиме этот момент является вращающим, а при работе в генераторном режиме - тормозным. В установившемся режиме ротор неподвижен относительно магнитного поля и вращается с частотой n = n1 независимо от механической нагрузки на валу ротора или электрической нагрузки.
Двигательный режим Принцип действия синхронного двигателя основан на взаимодействии вращающегося магнитного поля якоря и магнитного поля полюсов индуктора. Обычно якорь расположен на статоре, а индуктор — на роторе. В мощных двигателях в качестве полюсов используются электромагниты (ток на ротор подаётся через скользящий контакт щетка - кольцо), в маломощных — постоянные магниты. Существует обращённая конструкция двигателей, в которой якорь расположен на роторе, а индуктор — на статоре (в устаревших двигателях, а также в современных криогенных синхронных машинах, в которых в обмотках возбуждения используются сверхпроводники.)
Генераторный режим Обычно синхронные генераторы выполняют с якорем, расположенным на статоре, для удобства отвода электрической энергии. Поскольку мощность возбуждения невелика по сравнению с мощностью, снимаемой с якоря (0,3...2%), подвод постоянного тока к обмотке возбуждения с помощью двух контактных колец не вызывает особых затруднений. Принцип действия синхронного генератора основан на явлении электромагнитной индукции; при вращении ротора магнитный поток, создаваемый обмоткой возбуждения, сцепляется поочередно с каждой из фаз обмотки статора, индуцируя в них ЭДС. В наиболее распространенном случае применения трехфазной распределенной обмотки якоря в каждой из фаз, смещенных друг относительно друга на 120 электрических градусов, индуцируется синусоидальная ЭДС. Соединяя фазы по стандартным схемам «треугольник» или «звезда», на выходе генератора получают трехфазное напряжение, являющееся общепринятым стандартом для магистральных электросетей.
| |
 Скачать 3.44 Mb.
Скачать 3.44 Mb.