Билеты алгем. 9. Теорема КронекераКапелли. Фундаментальная система решений однородной системы линейных уравнений. Теорема о размерности пространства решений. Теорема КронекераКапелли (критерий совместности слу)
 Скачать 0.78 Mb. Скачать 0.78 Mb.
|

|
9. Теорема Кронекера-Капелли. Фундаментальная система решений однородной системы линейных уравнений. Теорема о размерности пространства решений. Теорема Кронекера-Капелли (критерий совместности СЛУ): Система линейных уравнений совместна тогда и только тогда, когда ранг ее основной матрицы равен рангу ее расширенной матрицы СЛУ совместна r(A) = r(A |  ) )Доказательство: => ∃  : ( : ( ), что A* = ), что A* =  α1  + α2 + α2 + … + αn + … + αn = , ∈ < , … , > = , ∈ < , … , >< , … , , > = < , … , >;dim< , … , , > = dim< , … , >;|| || rc ( A | ) = rc(A)<= rc (A) = rc ( A | ) => dim< , … , , > = dim< , … , >< , … , > ⊆ < , … , , >↓ < , … , > = < , … , , >, тогда ∈ < , … , >Пусть дана однородная система линейных уравнений  (1) (1)Множество всех решений этой системы образует подпространство пространства R0, называемое пространством решений системы Фундаментальная система решений (ФСР) однородной системы линейных уравнений (ОСЛУ) – базис пространства R0 Теорема о размерности пространства решений. Размерность пространства решений системы равна n – r(A), где n — число неизвестных в системе, а r(A) — ранг основной матрицы системы. dimR0 = n – r(A) Доказательство: r = r(A) Выберем наибольший ненулевой минор (r*r) Б.О.О. это M{1,..,r}{1,..,r} 2) первые r строк матрицы A – базис пространства строк А т.е. ур-ие с r+1 до m – следствия ур-ий с 1 по r. Итак ОСЛУ (1) эквивалентны.  (2) (2)3) перенесем все переменные кроме x1…xr в первую часть и придадим им любые значения из F.  По т.Крамера (3) имеет ровно 1 решение α1 α2 … αr | αr+1 αr+1 … αn  = ( = ( α11 α21 … αr1 | 1 0 … 0 ) α11 α21 … αr1 | 1 0 … 0 ) = ( α12 α22 … αr2 | 0 1 … 0 ) = ( α12 α22 … αr2 | 0 1 … 0 ) = ( α13 α23 … αr3 | 0 0 … 0 ) = ( α13 α23 … αr3 | 0 0 … 0 ). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .  = ( α1n-2 α2n-2 … αrn-2 | 0 0 … 1 ) = ( α1n-2 α2n-2 … αrn-2 | 0 0 … 1 )4) убедимся, что (( )T…(  )T) – Базис R0. )T) – Базис R0.β1 + … + βn-2 =  cм. на компоненту r + I; βi * 1 = 0 => βi = 0 т.е. ( … ) – ЛНЗУбедимся, что <( )T…( )T> = R0⊇ (  )T ∈ R0 )T ∈ R0( )T = (c1, c2, … , cr, cr+1, cr+2, … , cn)(  )T = ( )T - cr+1( )T - cr+2( )T - … - cn( )T ∈ R0 )T = ( )T - cr+1( )T - cr+2( )T - … - cn( )T ∈ R0( )T = (d1, d2, … , dr, 0, 0, … , 0) по построениюПо т.Крамера для (3) при αr+1 = αr+2 = … = αn = 0 d1 = d2 = … = dr = 0 Итак = => = ( )T = cr+1( )T + cr+2( )T + … + cn( )T ∈ <( )T…( )T>10. Линейное отображение и линейный оператор. Теорема существования и единственности линейного отображения. Матрица линейного отображения в базисах и оператора в базисе. Изменение матрицы отображения при замене базисов. Линейное отображение (ЛОт) Ꭿ: U -> V ∀  , ,  ∈ U Ꭿ( + ) = Ꭿ( )+ Ꭿ( ) ∈ U Ꭿ( + ) = Ꭿ( )+ Ꭿ( )∀α ∈ F;  Ꭿ(α ) = α*Ꭿ( ) Ꭿ(α ) = α*Ꭿ( ) 1’) ∀α, β ∈ F; , ∈ U  Ꭿ(α Ꭿ(α ) = α*Ꭿ( ) + β*Ꭿ( ) ) = α*Ꭿ( ) + β*Ꭿ( )V = U => линейное отображение Ꭿ = линейный оператор d Теорема существования и единственности линейного отображения U, V ЛП над F b = ( , … , ) – базис Uc = (  , … , , … , ) – упорядоченная система векторов внутри V (из V), тогда ) – упорядоченная система векторов внутри V (из V), тогда ∃! ЛОт Ꭿ: U -> V, что ∀i ∈ {1..n} Ꭿ(  ) = ) =  Доказательство: ∃  ∈ U => ∃! u1,u2… un ∈ F = u1 + … + un ∈ U => ∃! u1,u2… un ∈ F = u1 + … + un Ꭿ( ) = u1 + … + un ( ∀i : Ꭿ( ) = )1)  ∈ U = v1 + … + vn ∈ U = v1 + … + vn Ꭿ( + ) = (u1 + v1) + … + (un + vn) = Ꭿ( )+ Ꭿ( )Ꭿ(α ) = αu1 + … + αun = α*Ꭿ( ) ! Ᏸ: U->V ( ∀i : Ᏸ ( ) = )∀ ∈ U Ꭿ( ) = u1 + … + un = u1Ᏸ ( ) + … + unᏰ ( ) = Ᏸ( u1 + … + un ) =Ᏸ( ) => Ꭿ = Ᏸ b = ( , … , ) – базис Uc = ( , … , ) – базис VРассмотрим [Ꭿ]cb = ([Ꭿ( )]c, … , [Ꭿ( )]c )[Ꭿ]cb – матрица линейного оператора от Ꭿ в базисах b и c. U = V, c = b : [Ꭿ]bb = [Ꭿ]b – матрица ЛО Ꭿ в базисе b. Изменение матрицы отображения при замене базисов.   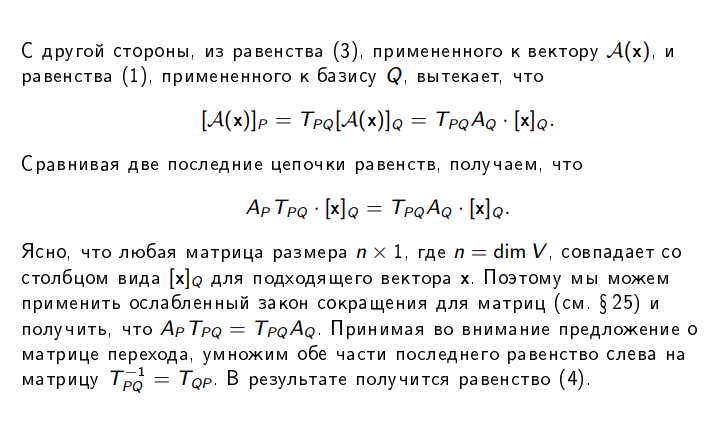 11. Сумма линейных операторов, произведение линейного оператора на скаляр. Изоморфизм векторных пространств линейных операторов и матриц. Характеристический многочлен линейного оператора. Теорема Гамильтона-Кэли для линейных операторов.  ∀ ∈ U (Ꭿ+Ᏸ)( ) = Ꭿ( )+ Ᏸ( ) ∀ ∈ U, α ∈ F (αᎯ)( ) = α*Ꭿ( )Изоморфизм векторных пространств линейных операторов и матриц    12. Образ и ядро линейного оператора. Теорема о размерности образа и ядра. Алгоритмнахождения базисов образа и ядра. Пусть Ꭿ - линейный оператор в векторном пространстве V (Ꭿ: V -> V) Образом Ꭿ называется множество всех векторов, ∈ V таких, что Ꭿ( ) = для некоторого ∈ VImᎯ = { ∈ V | ∃ ∈ V Ꭿ( ) = }Ядром Ꭿ называется множество всех векторов ∈ V таких, что Ꭿ( ) = 0KerᎯ = { ∈ V | Ꭿ( ) = 0}Размерность образа линейного оператора Ꭿ называется рангом Ꭿ r(Ꭿ) = dimImᎯ Размерность ядра оператора Ꭿ называется дефектом d(Ꭿ) = dimKerᎯ Теорема о размерности образа и ядра: r(Ꭿ) + d(Ꭿ) = dimV   Алгоритм нахождения базисов образа и ядра. Алгоритм Чуркина 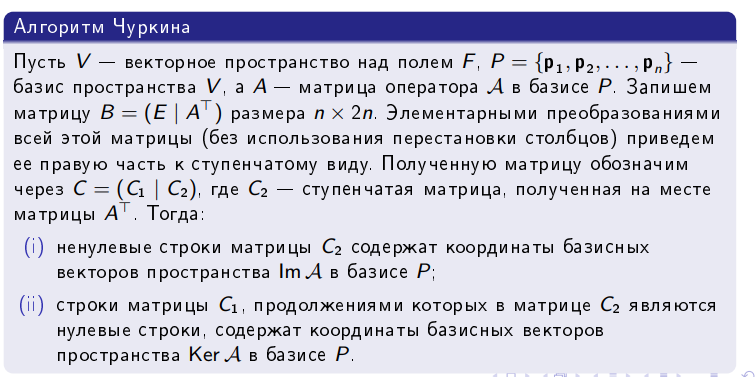 13. Собственные векторы и собственные значения линейного оператора. Теоремы о собственных векторах, относящихся к одному и тому же собственному значению и к разным собственным значениям. Собственные значения и корни характеристического уравнения оператора. Линейные операторы, приводимые к диагональному виду 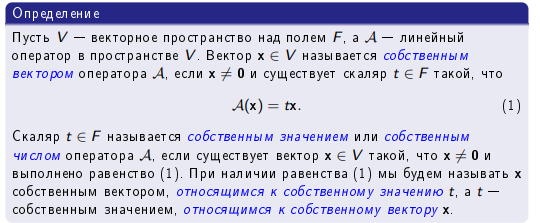 ∈ V собственный вектор ЛОп Ꭿ с собственным значением α, если ∈ V собственный вектор ЛОп Ꭿ с собственным значением α, если1) ≠ 2) Ꭿ( ) = α* Теоремы о собственных векторах, относящихся к одному и тому же собственному значению  Sα= { \ Ꭿ( ) = α* }, тогда Sα ≤ VДоказательство: a, b ∈ F, , ∈ Sα Ꭿ(a +b ) = aᎯ( ) + bᎯ( ) = aα + bα = α(a +b )Теоремы о собственных векторах к разным собственным значениям.    Собственные значения и корни характеристического уравнения оператора   Линейные операторы, приводимые к диагональному виду    |