ТРЛК 12А6. Оригинал - макет Сопка docx. А. Ф. Можайского (г. Ярославль) у стройство и эксплуатация радио станций Под общей редакцией Г. В. Дудалева устройство трассового радиолокационного комплекса двойного назначения трлк дн 12А6 сопка2 Учебное пособие
 Скачать 4 Mb. Скачать 4 Mb.
|

1.4 Режимы обзора и зоны обнаружения ПОРЛПОРЛ излучает последовательность из многочастотных импульсных сигналов с несущими частотами в диапазоне 2700-2850 МГц (литер Д). Для получения информации о координатах ВО в зоне до 80 км используются импульсные сигналы длительностью 1,6 мкс с монохроматическим заполнением. Для получения информации о координатах ВО, находящихся на дальностях более 80 км, используются импульсные сигналы, имеющие длительности 64, 35,2, 28,8, 19.2, 12,8 мкс с линейно-частотной модуляцией несущей частоты с девиацией 1,2 МГц. Соответственно режимы обзора в зависимости от их функционального назначения обозначены как "АМ1" и "КГ2". Режимы "АМ1" и "АМ2" предназначены для работы ТРЛК в амплитудном режиме без СДЦ. Режим "АМ1" служит для обнаружения целей на дальностях до 360 км и углах места от 0° до 5°. Режим "АМ2" предназначен для обнаружения целей на дальностях до 80 км и углах места от 21° до 45°. Режимы зондирования"КГ1" и "КГ2" предусмотрены в ТРЛК для функционирования СДЦ. Режим "КГ1" предназначен для обнаружения ВО и подавления отражений от подстилающей поверхности в ближней зоне (наклонная дальность до 50 км) и отражений от метеообразований. Режим состоит из двух пачек ("КГ1.1" и "КГ1.2") по 7 импульсов с постоянным периодом повторения. Отличие подрежима "КГ1.1" от "КГ1.2" состоит в том, что сканирование по углу места в "КГ1.1" производится снизу-вверх, а в "КГ1.2" - сверху-вниз, что значительно сокращает "мертвую" ближнюю зону. Для обнаружения ВО и защиты от ПП на дальностях до 200 км предусмотрен режим "КГ2", который представляет собой вобулированную пачку из 6-ти импульсов. Режим "КГ1" по сравнению с "КГ2" имеет большую помехозащищенность, но меньшую инструментальную дальность На рисунках 1.3 и 1.4 представлены зоны обнаружения ПОРЛ соответственно с ЭПР=2мІ, Роб≥ 0,5, Рлт=10-6 и ЭПР= 10мІ, Роб≥0,8, Рлт= 10-6. 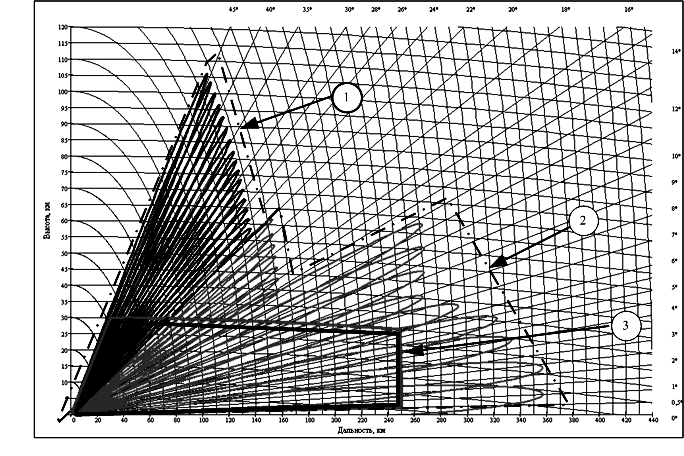 1 - Режим верхних лучей; 2 - Режим нижних лучей; 3 - заданная ТТЗ зона обнаружения по цели типа "истребитель" (ЭПР = 2 м2, Pо ≥0,5, Pл.т. = 10-6). Рисунок 1.3 Зона обнаружения ПОРЛ по ВО с ЭПР равной 2 м2 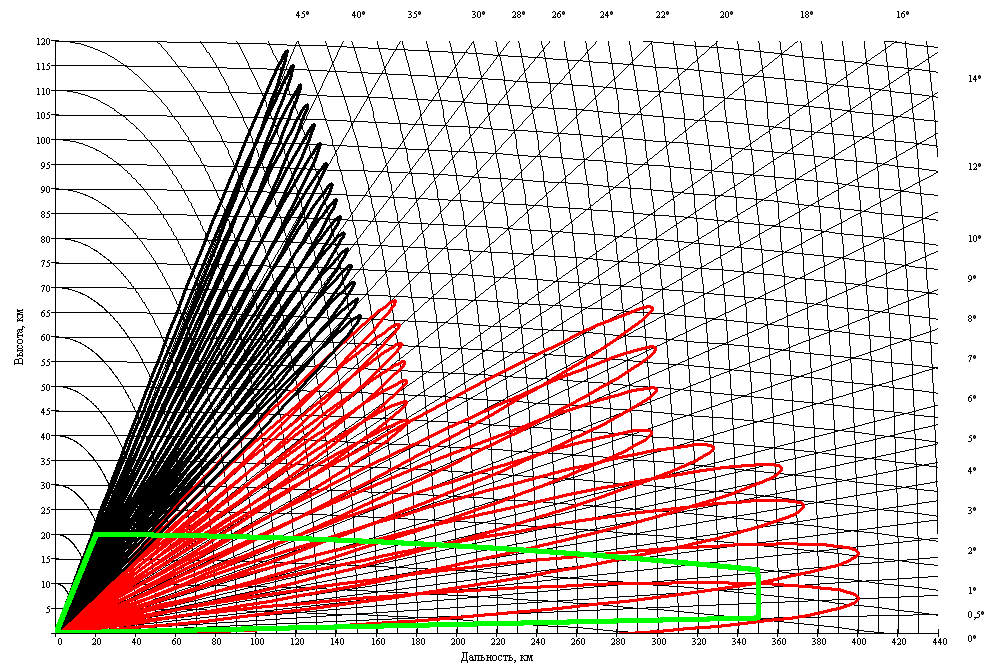 000 _________ Режим нижних лучей; __________ Режим верхних лучей; __________ заданная ТТЗ зона обнаружения по цели типа; "гражданский самолет" (ЭПР = 10 м2, Pо ≥0,8, Pл.т. = 10-6). Рисунок 1.4 Зона обнаружения ПОРЛ по ВО с ЭПР равной 10 м2 ТРЛК сопрягается со всеми типами средств отображения или АС УВД по координатной и/или по трассовой информации (определяется согласованными протоколами обмена). Обмен информацией между ТРЛК и КСА КП РТВ ВВС производится осуществляться по протоколам обмена, реализованным в КСА (без доработки последних). ТРЛК сопрягается по трассовой информации со следующими типами КСА КП (ПУ) РТВ ВВС: КСА ПУ рлр: «97Ш6»; «86Ж6» и «86Ж6С». КСА КП ртб: «5Н55-М», «61К6» («5Н60»), «98Ш6». ТРЛК должен сопрягаться со следующими типами КСА ПУ авиацией ВВС: средства автоматизации деятельности ГРП (ВИСП-97 и «Альфа-В»); КСА КП ап: «7Ф53»; КСА КП ад: «7Ф54». Для обеспечения информацией неавтоматизированных КП (ПУ) радиотехнических подразделений (в том числе удаленных) предусмотрена возможность выдачи информации на ВИП-117М3, размещаемый на КП подразделений. ( Рисунок № 2). Обмен информацией между ТРЛК и ВРМО осуществляется на расстоянии до 1000 м. Выносные рабочие места унифицированы со штатными рабочими местами ТРЛК, имеют индивидуальную систему охлаждения. 1.5 Функциональные связи между основными системами и устройствами ТРЛКФункциональная схема ПОРЛ приведена на рис. 1.5. Функциональная схема позволяет понять взаимодействие основных элементов и их сопряжение по основным параметрам, поэтому при описании основное внимание уделяется именно связям между системами, прохождению сигналов и управляющих команд.  Рисунок 1.5 Функциональная схема ТРЛК 12А6 Рисунок 1.5 Функциональная схема ТРЛК 12А6Антенная система ПОРЛ имеет один волноводный выход (вход на передачу), который через вращающийся переход и волноводный тракт соединен с ферритовым циркулятором, использующимся в качестве переключателя прием-передача. Выход циркулятора в сторону приемника соединен с входом волноводного электромеханического переключателя, служащего для коммутации основного и резервного приемного канала. Время переключения на резерв при выходе из строя аналоговой части приемника составляет 1-2 с. СВЧ-часть каждого приемного канала (основного и резервного) состоит из волноводного управляемого устройства защиты входа МШУ от проникающей в приемный тракт отраженной СВЧ-мощности своего передатчика, неуправляемого ограничителя для защиты входа МШУ от мощных сигналов других РЭС, направленного ответвителя, служащего для подачи на вход МШУ контрольного шумового сигнала, малошумящего транзисторного усилителя, делителя на 4, переключаемых полосовых фильтров, аттенюатора ВАРУ и смесителя. Каждый полосовой фильтр имеет полосу пропускания не менее 20-23 МГц. Центральные частоты фильтров расположены равномерно в полосе 150 МГц в виде двух переключаемых групп. Переключение групп фильтров производится одновременно с переключением частот гетеродинов и осуществляется по сигналам от устройства формирования зондирующих сигналов и синхронизации для обеспечения обзора сектора углов места от 0о до 22,5о (первая группа) и от 22,5о до 45о (вторая группа). Одновременно 4 приемных канала обеспечивают прием сигналов в полосе частот 80 МГц. На другой вход смесителя каждого из 4 каналов поступает сигнал гетеродина, сформированный в гетеродинном модуле. С выхода смесителя сигнал поступает на вход усилителя промежуточной частоты, где усиливается и фильтруется. Уровень шума в усилителе промежуточной частоты поддерживается системой ШАРУ. Управление аттенюатором ШАРУ производится от системы цифровой обработки путем оценки уровня шума в каждом парциальном канале в секторе контроля и установки положения аттенюатора, соответствующего номинальному значению уровня шума на выходе УПЧ. Выходы всех УПЧ основного и резервного приемника поступают на входы модулей аналого-цифрового преобразования основного и резервного комплекта системы цифровой обработки. Выбор канала приемника (основного или резервного) осуществляется коммутаторами, установленными на входе модуля АЦП. Управление коммутаторами производится системой контроля одновременно с управлением входным волноводным коммутатором. Преобразование аналогового сигнала в цифровой производится на промежуточной частоте порядка 50 - 60 МГц в полосе 22,5 МГц 16-разрядным АЦП с частотой дискретизации 80 МГц. С выхода АЦП сигнал поступает на специализированную ПЛИС 4-х канального DDC осуществляющую преобразование сигнала на видеочастоту и цифровую фильтрацию каждого канала в полосе 1,2 МГц. Таким образом, на выходе DDC получаем 4 дополнительных канала, разнесенных по частоте на 4-5 МГц внутри полосы 22,5 МГц. Общее число одновременно формируемых каналов составит 16. Каждому частотному каналу соответствует свое положение луча ДН антенны в пространстве. Цифровая обработка сигналов всех 16 частотных каналов производится в модуле ADP201сP5, установленном в крейте стандарта CompactPCI. Цифровая обработка включает в себя сжатие сложного сигнала, доплеровскую фильтрацию, некогерентное накопление, нормировку, сравнение с порогами и передачу амплитуды сигналов, превысивших порог обнаружения, с привязкой к азимутальной информации и с номером частотного канала на дальнейшую обработку в процессор первичной обработки информации. Первичная обработка информации, включающая в себя формирование пакетов, решение задач разрешения и измерения координат обнаруженных отметок и формирование различных карт, использующихся для выбора режимов помехозащиты, производится в процессоре ПОИ. Координатные отметки со всеми дополнительными признаками по каналу Ethernet 100 Base-TX передаются на процессор вторичной обработки информации, установленный в этом же крейте. Процессор вторичной обработки занимается также и формированием кодограмм для выдачи информации потребителям в два адреса в соответствии с согласованными протоколами сопряжения. Передающее устройство ПОРЛ построено на базе транзисторных усилителей (УМИ) по принципу когерентного суммирования СВЧ-мощности отдельных относительно маломощных усилителей. Количество УМИ определяется необходимой для обеспечения зоны обнаружения генерируемой средней мощностью передающего устройства - 3 кВт и выходной мощностью каждого из УМИ. Из этих соображений передающее устройство решено разместить в четырех идентичных шкафах по 16 УМИ в шкафу. Сложение мощностей 4-х шкафов осуществляется на 3-х двухвходовых волноводных сумматорах. Формирование сигналов гетеродина и зондирующего сигнала производиться в блоке формирователя сигналов, построенному по принципу умножения частот высокостабильных кварцевых генераторов (для формирования частот гетеродинов) и смешения частот гетеродинов и промежуточной частоты зондирующего сигнала для формирования сигнала передатчика. Управление формирователем частот, при формировании многочастотного зондирующего сигнала, ведется в реальном времени по командам, поступающим от устройства формирования сигнала на промежуточной частоте. Подробное описание формирователя сигналов приведено в руководстве по эксплуатации ЦИВР.462418.029 РЭ2. Оборудование распределения цепей первичного питания 380 В 50 Гц размещено в одном шкафу, в котором находятся: устройство резервирования сети, устройство распределения напряжения сети и защиты, устройство распределения напряжения + 27 В, устройство управления приводом вращения. Размещение аппаратуры а АК показано на рис. 1.6. 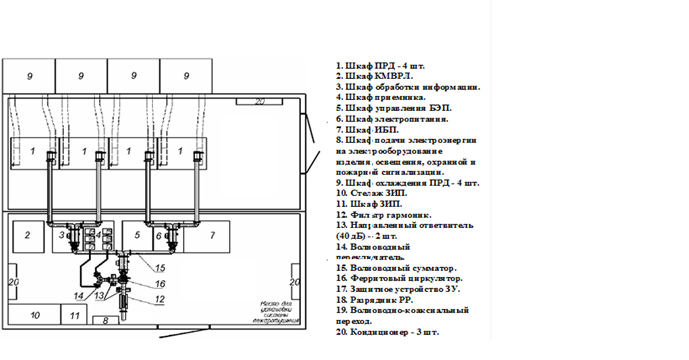 Рисунок 1.6 Размещение аппаратуры ТРЛК в аппаратном контейнере. Выводы: ТРЛК 12А6 представляет РЛС двойного назначения, который обеспечивает как обнаружения и сопровождения воздушных объектов, так и формирование и выдачу трассовой информации. Тактико-технические характеристики радиолокатора позволяют решать задачи по обеспечению радиолокационной информацией войска ЗРВ, истребительной и гражданской авиации. Контрольные вопросы: 1. Для чего предназначена ТРЛК 12А6? 2. Какие основные эксплуатационные характеристики ТРЛК 12А6? 3. Что входит в состав ТРЛК? 4. Какие основные тактические характеристики ТРЛК? 5. Какие основные технические характеристики ТРЛК? 6. Какие дальности обнаружения целей реализуются в ТРЛК? 7. От каких видов помех осуществляется защита ТРЛК? 9. Какие требования предъявляются к позиции для размещения ТРЛК? 10. Какая надежность ТРЛК? |