Акселерометри
 Скачать 383 Kb. Скачать 383 Kb.
|

|
Реферат на тему: «Акселерометри» . Содержание
Введение Работа на промышленных предприятиях требует внедрения автоматической системы управления. С этой целью применяется разное оборудование, способное обеспечить бесперебойное функционирование производственных машин. Для контроля металлических объектов не редко используют бесконтактные индуктивные датчики, обладающие как положительными, так и отрицательными качествами. Но главное, что они отличаются небольшими размерами и прекрасно выполняют возложенные функции, поэтому пользуются популярностью и у производителей бытовой и даже медицинской техники. Акселерометр – это измерительный прибор. С его помощью можно фиксировать и анализировать вибрации, а также движение и ускорение. С прибором напрямую связано понятие «кажущейся силы», так вот назначение акселерометра в его измерении. Кажущейся силой называют геометрическую разницу между реальным ускорением объекта и ускорением силы гравитации нашей планеты. Понятие применяется в системах инерционной навигации. Поэтому разберемся, для чего он необходим, где применяется, его устройство и принцип работы. Перед обсуждением технологии и особенностей применения, необходимо сделать несколько общих замечаний. Частотная характеристика – это зависимость электрического выходного сигнала акселерометра от внешнего механического воздействия в частотном диапазоне с фиксированной амплитудой. Это один из основных параметров, от которого зависит выбор того или иного компонента. Диапазон частот обычно определяется серией экспериментов и указывается в спецификации. Обычно этот параметр указывается с точностью ±5% от опорной частоты (обычно 100 Гц). Многие компоненты специфицированы на ±1 дБ или ±3 дБ. Эти значения указывают на точность акселерометра в заданном частотном диапазоне. Многие data sheet содержат графики типичной АЧХ, которые иллюстрируют флуктуацию точности компонента в различных частотных диапазонах. Другой важный параметр акселерометра – число осей измерения. Сегодня выпускаются компоненты с одной и тремя измерительными осями. Еще одна возможность построения сложной системы – это организация трех акселерометров в один измерительный блок. 1 Общее описание и назначение Акселерометр – это измерительный прибор позволяющий определить проекцию кажущегося ускорения. В простейшем исполнении он представляет собой грузик, закрепленный на упругом подвесе. При его отклонении от первоначального положения на упругом подвесе можно определить направление изменения положения, а также величину ускорения.  Рисунок 1 – Схематическая визуализация составных частей датчика Датчики, предназначенные для измерения линейных и угловых ускорений летательных аппаратов, называются акселерометрами • Акселерометры измеряют так называемое «кажущееся» ускорение в проекциях на определенные направления. К акселерометрам относятся и устройства для измерения проекций кажущейся скорости летательного аппарата. Кажущаяся скорость – это интеграл от кажущегося ускорения, поэтому такие акселерометры называются интегрирующими. По типу чувствительного элемента, используемого в акселерометрах, датчики делятся на гироскопические и негироскопические. • К акселерометрам относят также измерители ускорений линейных вибраций (вибродатчики, виброакселерометры). Существуют также конструкции акселерометров для визуального отсчета показаний. Такие акселерометры устанавливаются на некоторых типах быстроходных самолетов (например, на истребителях) для того, чтобы летчик мог судить о перегрузках, воз никающих в процессе выполнения эволюции, и не выходить за пределы, допускаемые прочностью самолета и физиологическими особенностями человеческого организма. Акселерометры являются основными элементами инерциальных систем навигации, предназначенных для определения скоростей и координат центра масс летательного аппарата посредством интегрирования ускорений, измеренных акселерометрами. 2 Где используется (сфера применения) Развитие технологий привело к внедрению акселерометра в различные виды оборудования, позволяя расширить их технические возможности. Если сразу после изобретения подобные датчики применялись только на паровозах с целью определения скорости их движения, то сейчас такие приборы можно встретить повсеместно. Долгое время акселерометры относились к оборудованию, которое не интересно окружающим. С развитием электронных технологий подобная тенденция пошла на убыль, сделав этот прибор известным среди широких масс. В первую очередь этому поспособствовало появление современных смартфонов, в корпусе которых имеется такое устройство.  Рисунок 2 – Датчик в телефоне Навигационные устройства летательных аппаратов. Самолеты, вертолеты и даже ракеты не обходятся без сложных систем навигации. Акселерометр и гироскоп служат для них основой. Автомобильные спидометры и видеорегистраторы. Первые определяют скорость по отклонению массы, а вторые определяют важные события (экстренное торможение, резкая смена скорости) и записывают их в отдельные файлы.  Рисунок 3 – Применение в сфере автомобилестроения Промышленные системы контроля вибрации различных станков, производственных линий и агрегатов. На показаниях прибора работают системы защиты, которые отключают питание или изменяют характеристики работы при достижении критических значений. В информационных технологиях такие приборы применяются для защиты жестких дисков от падений и сотрясений. Они отдают команду считывающим головкам занять безопасное положение во время падения. Это значительно снижает потерю данных и повреждения диска. На телефонах и планшетах: Автоматическая смена ориентации экрана при повороте девайса. Управление игровым процессом при помощи наклонов. Реагирование устройства на определенные жесты, и выполнение соответствующих действий (смена музыкального трека, отключение будильника или отклонение звонка). Примеры жестов: постукивание по корпусу или его встряхивание, переворот смартфона экраном вниз. Определение и визуальная демонстрация изменений положения человека в пространстве через навигационные приложения (Google Карты и др.). Возможность отслеживания физической активности. Классический пример – подсчет пройденной дистанции при помощи шагомера. 2.1 Принцип работы акселерометра Акселерометры различаются по типу выхода (аналоговые и цифровые), по частотным диапазонам, а также по количеству осей. Трёхосный акселерометр способен показывать частоты, периоды и формы собственных колебаний зданий и сооружений. Прибор позволяет анализировать ускорение, действующее в направлении сразу трёх осей. В некоторых случаях такое измерение является единственным способом получить необходимую информацию в полном объёме. Под крышкой корпуса такого акселерометра располагают пьезоэлементы. Они должны находится симметрично вдоль осей, находящихся перпендикулярно. Этот вид акселерометров считается своего рода «лидером». Ведь любое другое подобное устройство сильно уступает ему в точности, ширине как рабочего, так и частотного диапазонов. Более того, пьезоэлеметные приборы отличает прочность и надёжность. Ещё одним плюсом такого устройства считается то, что в процессе его использовании нет необходимости искать способ подключиться к электрической сети, аккумулятору или какой-либо источник питания. Отсутствие движущихся элементов даёт возможность говорить об очень низкой степени износа прибора. Если говорить о механике работы такого прибора, то это активные датчики, которые генерируют электросигнал, пропорциональный колебаниям. Главным элементом в таком акселерометре считается компонент, который подвергается воздействию. Так появляется электрический заряд, пропорциональный силе, воздействующей на него.  Рисунок 4 – Трехосевой акселерометр Акселерометр состоит из пружины, подвижной массы и демпфера. Пружина крепится к неподвижной поверхности, к пружине крепится масса. С другой стороны ее поддерживает демпфер, который гасит собственные вибрации груза. Во время ускорения массы деформируется пружина. На этих деформациях и основываются показания прибора. Три таких прибора, объединенные в одну систему и сориентированные по осям позволяют получать информацию о положении предмета в трехмерном пространстве. Когда происходит встряска, наклон или поворот объекта, в который встроен акселерометр, инертная масса реагирует на силу инерции. С увеличением интенсивности и силы наклона, поворота или сотрясения увеличивается радиус деформации пружины. Затем грузик принимает свою прежнюю позицию, благодаря пружине. Специальный датчик фиксирует уровень смещения инертной массы от ее положения в состоянии «покоя». Затем эти данные преобразуются в электрический сигнал, и передаются на обработку электроникой, и программным обеспечением. Благодаря полученным данным программа может «вычислить» изменения в физических изменениях расположения объекта. Еще есть такое понятие, как ось чувствительности прибора. Если ось только одна, датчик сможет передать данные об изменении положения объекта в пространстве только в пределах чувствительности оси. Чтобы увеличить чувствительность датчика, и получить точные данные о силе и направлении наклона объекта, необходимо две, а еще лучше три оси. Объединив в один прибор сразу три оси, можно вычислить положение объекта в трехмерном пространстве.  Рисунок 5 - Оси Акселерометр часто называют G-Sensor. Вообще, акселерометр регистрирует разницу ускорения объекта и гравитационного ускорения по трём осям. Затем электроника вычисляет разницу, делает выводы и отправляет сигнал программному обеспечению - когда и в какую строну повернуть экран. Отсюда вытекает главный недостаток акселерометра в телефоне: если нет ускорения или оно не велико, то акселерометр не работает - перестает регистрировать положение устройства в пространстве или делает это с большой погрешностью. Это негативно сказывается на точности управления устройством, к примеру, в играх или при управлении квадрокоптером. 3 Технические характеристики Перед обсуждением технологии и особенностей применения, необходимо сделать несколько общих замечаний. Частотная характеристика – это зависимость электрического выходного сигнала акселерометра от внешнего механического воздействия в частотном диапазоне с фиксированной амплитудой. Это один из основных параметров, от которого зависит выбор того или иного компонента. Диапазон частот обычно определяется серией экспериментов и указывается в спецификации. Обычно этот параметр указывается с точностью ±5% от опорной частоты (обычно 100 Гц). Многие компоненты специфицированы на ±1 дБ или ±3 дБ. Эти значения указывают на точность акселерометра в заданном частотном диапазоне. Многие data sheet содержат графики типичной АЧХ, которые иллюстрируют флуктуацию точности компонента в различных частотных диапазонах. Выбор акселерометра для ударных ускорений, в первую очередь, зависит от ожидаемого уровня ударного ускорения. Низкий уровень <500 г Столкновение <2000 г Поле в дальней зоне 500–1000 г, датчик на расстоянии 2 метров от точки удара Поле в ближней зоне >5000 г, датчик на расстоянии менее 1 метра от точки удара Для измерения малых ударных ускорений можно использовать акселерометры общего применения. Акселерометр должен иметь линейный диапазон до 500 г и ударопрочность 500 г. Обычно для этого используются датчики с выходным сигналом по напряжению, поскольку они не чувствительны к кабельным вибрациям. Для аттенюации резонанса рекомендуется использовать усилитель с фильтром нижних частот. После выбора акселерометра соответствующей технологии и отвечающего требованиям целевого применения необходимо рассмотреть ряд следующих факторов. В первую очередь, это условия окружающей среды, где датчик будет использоваться. Сюда относятся рабочая температура, максимальный уровень ускорения и влажность. Температурный диапазон Пьезоэлектрические общего применения -55…260°C Пьезоэлектрические высокотемпературные -55…650°C Пьезоэлектрические низкотемпературные -184…177°C С выходом по напряжению общего применения -55…125°C С выходом по напряжению высокотемпературные -55…175°C Пьезорезистивные -55…66°C Диапазон измерений акселерометра указывается в спецификации дважды, что может спутать инженера по применению. Действительный диапазон указывается в динамических характеристиках. Например, IEPE акселерометр может иметь диапазон 500 g, но при определенных условиях среды может выдерживать удар до 1000 g и 2000 g. 500 g – это максимальный диапазон линейной работы акселерометра. Параметры, указанные для определенных условий эксплуатации, показывают максимально допустимый уровень удара. Трехосевые линейные акселерометры двух видов: с аналоговым (рис. 6) и цифровым выходом (рис. 7). 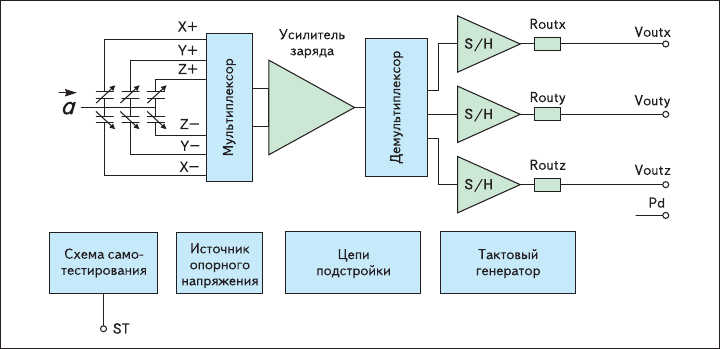 Рисунок 6 – Блок-схема акселерометра ST с аналоговым выходом  Рисунок 6 – Блок-схема акселерометра ST с цифровым выходом
3.1 Принцип действии различных видов Принцип действия акселерометра основан практически на измерении силы инерции, развиваемой сейсмической массой при ее движении с ускорением. 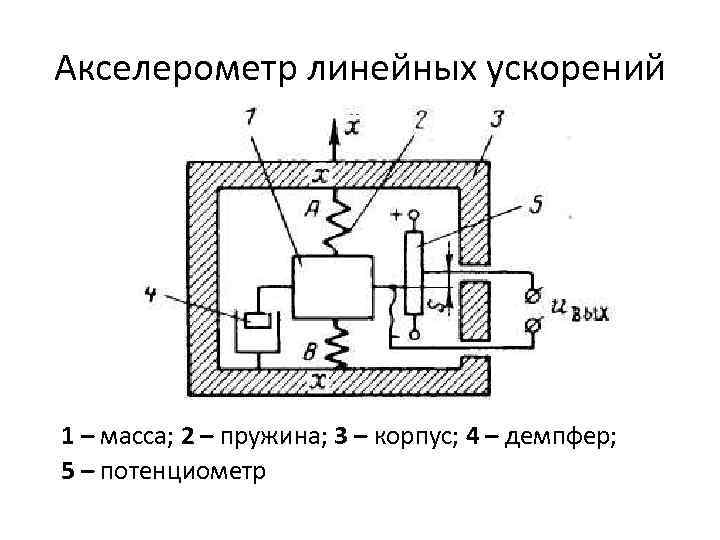 Рисунок 8 - Акселерометр линейных ускорений В качестве чувствительного (инерционного) элемента акселерометра используется масса 1, подвешенная на двух пружинах 2 • Проходящая через эти точки А и В линия, называемая измерительной осью, или осью чувствительности датчика, параллельна той оси, вдоль которой требуется измерить ускорение. Если летательный аппарат движется с постоянным ускорением ах, направленным вдоль измерительной оси, то равновесному положению измерительной системы соответствует такое смещение s инерционного элемента от нейтрали, при котором сила упругой деформации пружин сообщает массе абсолютное ускорение, равное ускорению движущегося летательного аппарата: где: су — суммарный коэффициент жесткости двух пружин; т — масса инерционного элемента. Перемещение s преобразует ся потенциометрическим, индуктивным, емкостным или каким либо другим датчиком в электрический сигнал Uвых. Для успокоения колеба ний измерительной системы в переходном режиме служит демпфер 5, при помощи которого на массу 1 накладывается сила ( ), пропорциональная скорости перемещения массы относительно корпуса 3, жестко связанного с летательным аппаратом: где: Кд — коэффициент демпфирования. Обычно применяют магнитоиндукционные, жидкостные или воздушные демпферы. У воздушных демпферов из за сжимаемости воздуха демпфирующая сила появляется не одновременно с возникновением скорости перемещения поршня, а с некоторым запаздыванием, что является их недостатком. 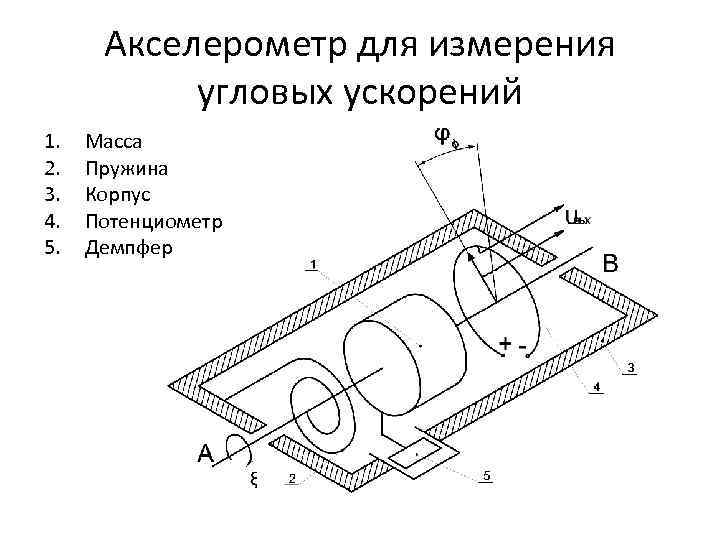 Рисунок 9 - Акселерометр для измерения угловых ускорений Акселерометр для измерения угловых ускорений • • отличается тем, что масса 1 не совершает поступательного движения относительно движущегося летательного аппарата, а лишь вращается вокруг оси АВ, представляющей собой измерительную ось акселерометра. Для того чтобы устранить влияние линейных ускорений, масса 1 должна быть уравновешена относительно оси вращения. Пружина 2 связана одним концом с массой, а другим с корпусом 3, жестко установленным на летательном аппарате, ускорение которого измеряется. При отсутствии угловых ускорений пружина 2 удерживает массу1 в положении, которое принимается за нулевое. При угло вых ускорениях система будет находиться в равновесном положении, если угловое ускорение массы 1 равно угловому ускоре нию )летательного ( аппарата: где: Су — коэффициент угловой жесткости пружины; J — момент подвижной системы; ϕ— угол отклонения инерционной массы от нулевого поло жения. Установившееся отклонение массы при постоянном ускорении пропорционально этому ускорению: Для успокоения колебаний и преобразования отклонения инер ционной массы в электрический сигнал в акселерометре устанав ливаются демпфер5 и потенциометр 4 или другой электрический датчик.  Рисунок 10 – Компенсационный акселерометр 3.2 Причины погрешности прибора и технические особенности устройств При работе акселерометра могут возникать отклонения показаний его измерения. На это в первую очередь может влиять влажность и температура окружающей среды. Это меняет свойства материалов, которые применяются при изготовлении приборов. Также помехи создает внешнее магнитное поле. Для минимизации его влияния конструкции датчика могут иметь различные технические дополнения. Также погрешность измерений получается в результате вибрации объекта измерения. Акселерометры могут отличаться между собой не только по направлению их использования, но и техническими особенностями. При выборе данного устройства, к примеру, при ремонте различного оборудования, которое им уже комплектовалось, стоит отдавать предпочтение аналогичному датчику. Также возможен выбор устройств с более высоким динамическим диапазоном. Этот показатель отражает максимальную амплитуду колебаний, на которую способен отреагировать прибор. Также важным показателем является чувствительность прибора. Различные изделия отличаются между собой по диапазону частоты, которая измеряется в Гц. Заключение Датчики являются элементом технических систем, предназначенных для измерения, сигнализации, регулирования, управления устройствами или процессами. Датчики преобразуют контролируемую величину. давление, температура, расход, концентрация, частота, скорость, перемещение, напряжение, электрический ток и т. п.) в сигнал (электрический, оптический, пневматический), удобный для измерения, передачи, преобразования, хранения и регистрации информации о состоянии объекта измерений. Исторически и логически датчики связаны с техникой измерений и измерительными приборами, например термометры, расходомеры, барометры, прибор «авиагоризонт» и т. д. Обобщающий термин датчик укрепился в связи с развитием автоматических систем управления, как элемент обобщенной логической концепции датчик -- устройство управления -- исполнительное устройство -- объект управления. В качестве отдельной категории использования датчиков в автоматических системах регистрации параметров можно выделить их применение в системах научных исследований и экспериментов. Датчик — это миниатюрное, сложное устройство, которое преобразует физические параметры в сигнал. Подает он сигнал в удобной форме. Основной характеристикой датчика является его чувствительность. Датчики положения осуществляют связь между механической и электронной частью оборудования. Пользуются им для автоматизации процессов. Используются эти устройства во многих отраслях производства. В заключении следует отметить, что в перспективе развития датчиков, конечно, хочется верить будет достигнут определенный прогресс, например, такой, который был рассмотрен выше (тенденции развития датчиков). Конечно, каждый из видов датчиков обычно применяется в различных областях, но следует заметить что при комбинированном исполнении датчиков по современным технологиям не только упрощаются задачи контроля, но также уменьшаются весогабаритные показатели и общая стоимость оборудования, в котором используются эти системы контроля. Список используемой литературы 1. Како Н., Яманэ Я. Датчики и микро-ЭВМ: пер. с япон.- Л.: Энергомиздат. 1986.- 120с.: ил. 2. Научная библиотека диссертаций и авторефератов disserCat http://www.dissercat.com/content/matematicheskie-modeli-kontaktnykh-datchikov-temperatury-i-tsifrovye-metody-kompensatsii-ikh#ixzz2xLoJ6I53 3. Брейли Р., Майерс С. «Принципы корпоративных финансов», Изд. «ЗАО Олимп-Бизнес», 1997. 4. Игнатов В. А. и др. Электрооборудование современных металорежущих станков и обрабатывающих комплексов: Учеб. для ПТУ/В. А. Игнатов, В. Б. Ровенский, Р. Т. Орлова.- М.: Высш. шк., 1991.-96 с.: ил. 5. Коновалов Л. И., Петелин Д. П. Элементы и системы электроавтоматики: Учеб. пособие для студ. вузов спец. "Автоматизация и компл. механизация хим.-технол. процессов". - 2-у изд., перераб. и доп. - М.: Высш. шк.,1985. - 216 с., ил. 6. Беликов И. Д. Магнитомодуляционные путевые переключатели. М., "Энергия", 1974.Источник: https://www.prorobot.ru/nauka/datchiki.html 7. Гуреев В.В. Применение дискретной модели света с внутренним источником теплоты для определения постоянной температуры среды / В.В. Гуреев, А.А. Шевченко // Математические методы в технике и технологиях: материалы XXI Междунар. науч. конф. Саратов: Сарат. гос. техн. ун-т, 2008. Т.7. С.51-53. 8. Датчики физических и механических параметров. Справочник, т.1, кн.1/ Под общ.ред. Коптева Ю.Н., под ред. Багдатьева Е.Е., Гориша А.В., Малкова Я.В.- М.: ИПЖР, 1998. 9. Иванова Г. М. Светотехнические измерения и приборы: учебник для вузов / Г. М. Иванова, Н. Д. Кузнецов, В. С. Чистяков. - 2-е изд., перераб. и доп. - М.: Издательство МЭИ, 2005. - 460 с., ил. 10. Кадушин А., Михайлова Н., Информационные технологии: внедрение и эффективность, http://www.iteam.ru |