курсовая по судовым. Ладыгин-Курсач. Анализ и диагностирование работы однорежимного регулятора частоты вращения вала дизеля р11М
 Скачать 0.77 Mb. Скачать 0.77 Mb.
|

|
Государственный комитет по рыболовству ВПО «Калининградский Государственный Технический Университет» ФГБОУ «Балтийская Государственная Академия Рыбопромыслового Флота» Судомеханический факультет Кафедра СЭУ Дисциплина: Диагностирование систем автоматического управления Курсовой проект на тему: «Анализ и диагностирование работы однорежимного регулятора частоты вращения вала дизеля Р-11М» Выполнил: курсант М- 51 Ладыгин О.А. Проверил: ОглавлениеВведение 3 1.Основные технические характеристики судна 4 Система отопления 6 2. Система ДАУ судовых дизель-генераторов 8 3.Элемент автоматики. Однорежимный регулятор частоты вращения вала дизеля, привести схему регулятора Р-11М. 11 4.Расчеты 13 5.Схема автоматизации 14 Заключение. 20 Список литературы 22 ВведениеАвтоматизация судов — это процесс, при котором функции управления судном и его оборудованием, ранее выполнявшиеся человеком, передаются приборам и техническим устройствам. Автоматизация судовождения обеспечивает безопасность рейсов судов. При автоматизации судовых энергетических установок повышается надежность и экономичность работы оборудования, увеличивается производительность и улучшаются условия труда плавсостава, сокращается его численность. Различают частичную и комплексную автоматизацию. В 40-50-х гг. началась автоматизация отдельных механизмов на судах. Работы в области комплексной автоматизации отечественных судов были начаты в 60-х годах. На судах типа «Новгород» было реализовано шесть различных программ автоматизации, что дало возможность накопить значительный опыт эксплуатации автоматизированных судов. Полученные результаты отражены в Правилах Регистра. Надзору на судне подлежат системы автоматизации главных двигателей, котельной установки, судовой электростанции, системы компрессоров сжатого воздуха, осушительной системы, вспомогательных механизмов и др. Межремонтный ресурс автоматизированного оборудования должен быть не менее 25 тыс. ч, ежегодная наработка оборудования без подрегулировок и наладок должна составлять не менее 5 тыс. ч. Элементы и устройства автоматизации должны безотказно работать при длительном крене судна до 22,5° и длительном дифференте до 10°, а также при бортовой качке до 45° с периодами 5-17 сек. Все оборудование автоматизации конструируют, или выбирают по принципу «выход из строя в безопасную сторону». На современных автоматизированных судах общее число средств так называемой «периферийной автоматики» достигает 500-700 ед. Практика эксплуатации показывает, что именно эта аппаратура наименее надежна. Многочисленные датчики и сигнализаторы имеют ресурсные характеристики в 2-2,5 раза ниже, чем гарантированный ресурс самих комплексных систем автоматизации. Характеристики надежности комплексных систем автоматизации, поставляемых на флот, гарантируются разработчиками без учета входящих в системы датчиков. При гарантированном техническом ресурсе автоматизированного комплекса, равном 25тыс.ч, и суммарной наработке на отказ не менее 5 тыс.ч до 75% входящих в него датчиков имеют технический ресурс 5-10 тыс.ч и фактическую наработку не более 2-3 тыс. Первостепенными задачами на современном этапе развития автоматизации являются: повышение надежности элементной базы; организация технического обслуживания систем автоматизации в судовых условиях и в порту; подготовка кадров, способных технически грамотно эксплуатировать системы автоматизации и выполнять необходимые профилактические мероприятия. Основные технические характеристики суднаПроект №00101 Тип судна: «Валдай» — большие сухогрузные суда класса «река-море», имеющие три трюма с люковыми закрытиями, с двойными бортами и двойным дном, с машинным отделением и надстройкой в кормовой части. Класс Речного Регистра – КМ ЛУ2 I 1 А1 Размеры корпуса расчетные, м Длина – 128,2 Ширина – 16,74 Высота борта – 6,1 Осадка кормой (река/море) – 3,6/4,2 Мощность и число главных дизелей, кВт – 2х1140 Частота вращения, мин-1 – 375 Скорость хода, км/ч – 21 Диаметр гребного винта, м – 1,8 Главные двигатели: Тип – Г60 (6ЧРН 3.6/45), вертикальный четырехтактный простого действия тронковый реверсивный с газотурбинным наддувом Количество – 2 Мощность – 662 кВт Частота вращения – 375 об/мин Пуск - Сжатым воздухом давлением до 30 кгс/см2 Дау пневматическое Движители: Тип – гребной винт Количество – 2 Диаметр – 1,8 м Шаг левого винта – 1,52 м Шаг правого винта- 1,47 Дисковое отношение – 0,62 Число лопастей – 4 Частота вращения – 375 об/мин Материал винтов- сталь Насадки- поворотные Электростанция: Род тока и напряжение – переменный трехфазный 380 В Сеть освещения и отдельных силовых потребителей-Переменный, 220 в Сеть машинных телеграфов, рулевых указателей и освещения шкал тахометров-Переменный, 127 в Сеть питания отдельных потребителей-Постоянный ток, 115 в и 24 а Переносное освещениеПеременный, 12 в Дизель-генератор -ДГР-100/750 Количество – 2 Дизель 64 18/22 Мощность – 112 кВт Частота вращения – 750 об/мин Пуск сжатым воздухом до 30 кгс/см2 Генератор ГСС103—8Мощность –100 кВтНапряжение - 400 в Дизель-генератор стояночный ДГ-25/1—2 Количество – 1 Дизель 4Ч 10,5/13-2 Мощность – 30 кВт Частота вращения – 1500 об/мин Пуск электростартером Генератор МС82-4 Мощность – 25 кВт Напряжение - 400 в Валогенератор ДГС-92/4Щ2М Род тока переменный Напряжение 400 в Мощность 50 кВт Частота вращения 1500 Системы, обслуживающие главную установку Система сжатого воздуха: Компрессор – 20К-1-Э6/1 Количество-2 Подача – 30 м3/ч Давление – 3 Мпа Электродвигатель – АМ62-4Щ2 Мощность – 11 кВт Частота вращения – 720 об/мин Пусковой баллон Количество – 8 Вместимость – 0,2 м3 Давление – 3 Мпа Топливная система Топливная цистерна: Количество – 3 Вместимость – 65, 2х22 и 2х38 м3 Расходная топливная цистерна главного двигателя: Вместимость – 3,2 м3 Топливный насос – РЗ-4,5 Подача – 3,3 м3/ч Напор – 33 м Электродвигатель – АОМ41-4 Мощность – 1,7 кВт Резервный топливный насос – РН-40, ручной Подача – 2,1 м3/ч Масляная система Основного запаса масла Вместимость – 2х5 м3 Циркуляционная масляная Количество – 2 Вместимость – 1 м3 Сточная масляная Вместимость – 3,5м3 Маслопрокачивающий насос – РЗ-30 Электродвигатель – АО52-6 Мощность – 4,5 кВт Частота вращения – 950 об/мин Общесудовые системы Балластно-осушительная Балластные цистерны Вместимость Балластная форпик – 57 м3 Балластная 1-375 м3 2-375 м3 3-375 м3 4-746 м3 Балластная ахтерпик-156 м3 Балластно-осушительный насос – С-569 Количество – 2 Подача – 250 м3/ч Напор – 20 м Электродвигатель – АО2-61-4Щ2 Мощность – 13 кВт Противопожарная система Система водотушения Пожарный насос – ЗКМ-6 Количество-2 Подача – 30-70 м3/ч Напор – 62-40 м Электродвигатель – А2-61-2щ/Ф2 Мощность – 17 кВт Система пенотушения Цистерна хранения пены Вместимость – 0,3 м3 Санитарные системы Системы водоснабжения Цистерна питьевой воды Вместимость – 18 м3 Санитарный насос 1,5ВС-1,3М Подача – 4-8 м3/ч Напор –50-18 м Электродвигатель – АО42-4 Мощность – 2,8 кВт Напряжение- 380 в Пуск – автоматический Санитарный насос резервный РН-40, ручной Станция обработки питьевой воды- Скоростной напорный песочный фильтр и устройство для обеззараживания воды озоном Насос Забортной воды 1ВС-0,9М Подача – 1-3,5 м3/ч Напор –12,5-3,5 м Электродвигатель – АО32-4 Мощность – 1 кВт Пуск – автоматический Водонагреватель-обогревается горячей водой системы отопления Вместимость 400л Циркуляционный насос горячей воды – ЭЦН-18/11 Подача – 1 м3/ч Напор –10 м вод ст Электродвигатель–АОМ122Щ2/Ф3 Мощность – 0,45 кВт Сточно-фановая система Фекальная цистернаВместимость – 6 м3 Система отопленияКотлоагрегат – КОАВ 200 теплопроизводительность – 200000 ккал/ч Поверхность нагрева – 7 м2 Давление – 1,8 кгс/см2 Утилизационный водогрейный котел – КУВ 100 Количество – 2 теплопроизводительность – 100000 ккал/ч Поверхность нагрева – 10 м2 Давление – 1,8 кгс/см2 Вентилятор системы отопления жилых помещений 30ЦС-24 Подача – 3000 м3/ч Электродвигатель – АОМ41-2 Мощность – 3,2 кВт Резервный циркуляционный насос ЦНГ 10/11 Подача – 10 м3/ч Электродвигатель – АОМ41-2 Мощность – 3,2 кВт Система вентиляции Приточная вентиляция Вентилятор МО Количество 2 Подача – 9000 м3/ч Давление – 11 Мпа Вентиляторы камбуза провизионной и санблока Количество – 2 Подача – 4200 м3/ч Давление – 6 Мпа Грузовые устройства вместимость грузовых трюмов 6370 материал крышек- сталь уплотнение – резиновое Схема раскрытия люков- Крышки средних люков передвигаются под приподнятые крышки крайних люков, которые опускаются на средние, и в таком спаренном виде крышки передвигаются лебедкой, обеспечивая полное раскрытие одного трюма или одновременное раскрытие обоих трюмов на 50% управление раскрытием люков - Дистанционное с поста управления, расположенного на левом крыле ходового мостика Рулевое устройство Насадки-Поворотные со стабилизатором Количество – 2 диаметр – 1,84 м длина-1,66 м Рулевая машина – РЭР-7,5-15 сдвоенная электрическая секторная; обеспечивает одновременную и раздельную перекладку насадок Исполнительный электродвигатель – ПНЗ-45 Количество 2 Мощность – 6.2 кВт Трехмашинный агрегат Приводной электродвигатель –АМ62-4 Род тока – переменный Мощность – 11 кВт Напряжение – 380 В Генератор ПН-100 Род тока – постоянный Мощность – 8,4 кВт Возбудитель Напряжение – 230 В Мощность – 0,8 кВт Якорное и швартовное устройство Якорь Количество и масса носовых якорей – 2х1750 Масса кормового якоря – 1250 кг Калибр и длина цепей носовых якорей – 43х150 43х150, мм x м То же кормового якоря – 37x75 Брашпиль – БЭ 16-4 Тяговое усилие на швартовном барабане – 5 тс Электродвигатель – МАП-611-4/8/16 Мощность – 36/17/10 кВт Частота вращения – 1345/368 об/мин Шпиль якорно-швартовный – ШЭР 1,5/3/2-1 Тяговое усилие на швартовном барабане – 3тс Электродвигатель – МАП-511-4/16 Мощность – 20/5 кВт Спасательное устройство Спасательная шлюпка – СШП 16/16 пластмассовая Количество – 2 Вместимость – 16 чел. шлюпбалки Шб2Ш2,5 двухшарнирные шлюпочные лебедки ЛЭРШ12-10 и ЛЭРШ12-11 Количество – 2Электродвигатель – МАП 112-4 Мощность – 4,4 кВт Частота вращения – 960 об/мин Топливо и масло Основное топливо – дизельноеЗапас – 145 т Масло – дизельное Запас – 6 2. Система ДАУ судовых дизель-генераторовСудовые дизель-генераторы условно можно разделить на две группы: обеспечивающие непрерывное электропитание потребителей в нормальных эксплуатационных режимах; обеспечивающие электроснабжение наиболее ответственных потребителей электроэнергии в аварийных режимах. В зависимости от объема автоматизации для дизель-генераторов установлены три степени автоматизации. Наибольший интерес представляют системы ДАУ основными и аварийными дизель-генераторами, охватывающие главную часть объемов автоматизации. На судах отечественной постройки эксплуатируются различные системы ДАУ судовыми дизель-генераторами (ДАУ 7Д12, ДАУ 6Д50А, ДАУ СДГ-Т и др.). Широко применяют на судах современной постройки систему ДАУ СДГ-Т, предназначенную для дистанционного автоматизированного управления судовыми дизель-генераторами переменного и постоянного тока мощностью 100—1000 кВт. Эта система, выполненная на унифицированных электрических элементах, обеспечивает выполнение следующих операций: автоматическое поддержание дизеля в состоянии горячего резерва; автоматические пуск и остановку дизель-генератора; дистанционные пуск и остановку дизель-генератора; автоматическую защиту дизель-генератора путем его остановки при возникновении аварийных состояний; сигнализацию о состоянии дизель-генератора; встроенный функциональный контроль исправности. Система состоит из четырех блоков (рис. 1, а): блока управления БУ, основного пульта управления ОПУ, выносного пульта управления ВПУ и блока питания БП.  Рис. 1. Система СДГ-Т На ОПУ установлены элементы управления системой и табло световой сигнализации; ВПУ частично дублирует ОПУ; БУ содержит логические функциональные блоки, выходные устройства, коммутационные элементы для приема сигналов ОПУ, ВПУ, датчиков выдачи сигналов на исполнительные устройства, сигналов на электростанцию и ЦПУ. Датчики, устанавливаемые на дизеле М и его системах, обеспечивают контроль за давлением и температурой масла, давлением и температурой охлаждающей воды, частотой вращения дизеля. Функциональная схема системы представлена на рис. 1, б. Логическая схема БУ состоит из следующих функциональных блоков: двух блоков стабилизированного питания БСП, блока пуска БП1, блока остановки БО, блока неотключаемых элементов БСП, блока аварийных защит БАЗ, блока контроля времени БКВ, двух блоков усилителей БУ. Функциональные блоки выполнены на транзисторных логических элементах с выходом на устройства автоматики через контактные реле. К исполнительным устройствам и механизмам системы относятся: насосы масляной системы, системы охлаждения и подогрева; электродвигатель регулятора скорости; электромагнитные клапаны топливной системы, системы аварийной остановки, воздушного пуска, предварительного подогрева. Система обеспечивает несколько вариантов ее использования для управления различными типами судовых дизель-генераторов. Работа ДАУ для дизель-генераторного агрегата Рассмотрим в упрощенном виде работу системы для дизель-генераторного агрегата типа ДГР 300/500-2. По сигналу на пуск (с пульта управления или от внешнего импульса) включается электромагнит пускового клапана прокрутки (ЭМПКП). Серводвигатель включается на систему ДАУ и устанавливает топливную рейку в положение минимально устойчивой частоты вращения. В этом положении топливная рейка через конечный выключатель отключает серводвигатель. По сигналу датчика прокрутки отключается электромагнит и включается насос прокачивания масла. При включении насоса включается механизм контроля времени прокачивания. По сигналу датчика давления масла отключается механизм контроля времени прокачивания масла, включается электромагнит пускового воздуха и механизм контроля времени пуска воздуха. По сигналу датчика первой уставки скорости отключается насос прокачивания масла, электромагнит, механизм контроля времени пуска воздуха и включается насос забортной воды охлаждения дизеля. Если через определенное время давление масла не достигнет нужной уставки или дизель не выйдет на минимально установленную частоту вращения, то выдается сигнал о несостоявшемся пуске. При этом система возвращается в исходное состояние и выдает сигнал на повторный запуск. В случае удавшегося запуска двигатель прогревается на минимально устойчивой частоте вращения. При достижении температуры воды и масла уставок срабатывания соответствующих датчиков включается серводвигатель в сторону увеличения частоты вращения дизеля. При выходе на номинальную частоту вращения срабатывает конечный выключатель КВВ и датчик второй уставки скорости ДСВ2. Конечный выключатель КВВ отключает серводвигатель, система выдает сигнал на включение нагрузки или синхронизатора. С включением нагрузки система отключается и загорается табло «Нагрузка включена». По сигналу на остановку (с пульта управления, или по внешнему импульсу) блок остановки отключает нагрузку и включает серводвигатель на уменьшение частоты вращения дизеля до уставки КВН. При снижении частоты вращения ниже уставки датчик ДСВ1 отключает насос НЗВ, дизель останавливается, и схема подготавливается к очередному пуску. Элемент автоматики. Однорежимный регулятор частоты вращения вала дизеля, привести схему регулятора Р-11М.Однорежимные регуляторы частоты вращения прямого действия типа Р-11М, обладающие работоспособностью 0,57Н*м, устанавливают на ДГ малой мощности отечественной постройки. Регулятор выполнен в виде отдельного узла, закрепленного на блочном ТНВД. От распределительного вала ТНВД через шестерню 13 вращение передается грузам 14. Центробежная сила, действующая на грузы, через шток 15 передается на рычаг 6 и уравновешивается силами действия пружин 3, 5 и 7. Основной является пружина 3, работающая на сжатие, изменением предварительного натяжения которой регулятор настраивается на заданную частоту вращения. Пружина 5 является дополнительной, а сила ее действия на рычаг 6 зависит от положения рычага и нижней опоры 4. Дополнительная пружина 7 одним концом прикреплена к поршню катаракта 8, обеспечивая с ним упругую связь, и работает только в переходных процессах. При работе регулятора распорной пружиной 12 обеспечивается постоянный контакт между выходным рычагом 6 и тягой 10 топливного насоса (зазор α1=0), что соответствует всережимной схеме включения регулятора.  Рис2. Схема регулятора Р-11М. На установившемся режиме работы двигателя частота вращения вала неизменна, указанные силы уравновешиваются на рычаге 6, удерживая его и тягу ТНВД в неподвижности, что соответствует определенной подаче топлива и мощности, развиваемой двигателем. Например, при сбросе нагрузки возрастает частота вращения вала двигателя и центробежная сила, действующая на грузы 14 измерителя. Под действием разности центробежной силы и сил действия пружин 3, 5 и 7 разворачивается рычаг 6, перемещая тягу 10 в сторону уменьшения подачи топлива. Мощность двигателя снижается и сравнивается с мощностью потребителя. Вначале тяга 10 перемещается быстро, пропорционально изменению указанных сил, а затем постепенно замедляется (по мере приближения частоты вращения к начальному значению и прекращения действия дополнительной пружины 7 вследствие движения поршня катаракта). При меньшей мощности двигателя и соответствующем положении тяги ТНВД на установившемся режиме рычаг 6 занимает новое положение. Но вследствие увеличения натяжения пружин 3 и 5 он может удерживаться здесь только при большем значении центробежной силы, а, следовательно, и частоты вращения. Таким образом, рассмотренный регулятор является статическим, поддерживая заданную частоту вращения со статической неравномерностью. Степень неравномерности АСР с этим регулятором можно устанавливать в пределах 2-6% изменением приведенной жесткости пружин при изменении действия дополнительной пружины 5. С уменьшением действия пружины 5 (смещение опоры 4 ближе к оси рычага 6) неравномерность уменьшается. Снижение статической неравномерности АСР приводит к уменьшению ее динамической устойчивости. Для повышения динамической устойчивости АСР прикрывают иглу 9 катаракта (увеличивают время Тк катаракта). Полное закрытие иглы катаракта или заклинивание его поршня в цилиндре приводит к значительному росту статической неравномерности АСР вследствие непрерывной работы пружины 7 при различных нагрузках. Раскачивание АСР в динамике может возникнуть вследствие заедания тяги ТНВД. Признаком заедания является движение тяги рывками, а также непрерывное появление и исчезновение зазора a t между опорной гайкой тяги 10 и рычагом 6, Для настройки регулятора на заданную частоту вращения изменяют предварительное натяжение пружины 3 вращением маховика 1, по резьбовому штоку которого перемещается опорная гайка 2. Для остановки двигателя разворачивают рычаг 11, который, выбрав зазор α2 через упор воздействует непосредственно на тягу ТНВД. Наличие опорной пружины 12 позволяет отводить тягу в нулевое положение, не оказывая влияние на элементы регулятора. РасчетыНа κ (орган управления двигателем) можно воздействовать с помощью автоматического регулятора, измеряющего различные параметры, характеризующие неустановившиеся режимы его работы. Прежде всего, можно измерить изменение самого регулируемого параметра, т. е. φ, и в зависимости от его значения воздействовать на κ. Такой принцип регулирования получил наименование принципа Ползунова—Уатта. Уравнения этих регуляторов, связывающих φ и κ, в самом простейшем случае можно представить в виде δz η=φ где δz - коэффициент пропорциональности; η = ∆z/z0- безразмерное перемещение муфты 3 регулятора Принцип Ползунова—Уатта. Уравнение такого регулятора в упрощенном представлении можно записать в виде:  δz η=φ; δz η=φ;  Координаты η и κ в данной системе являются внутренними и могут быть исключены. Это приводит к дифференциальному уравнению:  Общий интеграл этого уравнения при единичном ступенчатом возмущении, когда θ∂ = 1,0 и α∂ = -1,0 (при сбросе нагрузки), имеет вид:  Сопоставление полученного общего интеграла САР с общим интегралом  двигателя показывает, что двигателя показывает, что (1 + κдδz)/Tдδz > κд/Тд. Следовательно, принцип Ползунова- Уатта обеспечивает повышение устойчивости и качества работы системы. При установке на двигателе автоматического регулятора, действующего на основе принципа Ползунова- Уатта, переходный процесс может быть сходящимся, т.е.: при t→ + ∞ величина φ → δz/(1 + κдδz) а система автоматического регулирования - устойчивой (даже при κд <0), когда сам двигатель неустойчив, если при этом 1 + κдδz> 0. Схема автоматизации Структурная схема системы прямого автоматического регулирования система прямого автоматического регулирования состоит из объекта регулирования и регулятора прямого действия. Регулятор частоты вращения включает три основных элемента: чувствительный элемент, элемент сравнения и задающий элемент. Как видно из рисунка, регулятор получает входной сигнал Хвх (частота вращения коленчатого вала двигателя) и в зависимости от него вырабатывает выходной сигнал Увых (перемещение регулирующего органа -рейки топливных насосов). Чувствительный элемент регулятора непрерывно замеряет параметр объекта регулирования - частоту вращения коленчатого вала и преобразует величину замеряемого параметра в выходной сигнал чувствительного элемента X ч. э. В регуляторах частоты вращения прямого действия выходной сигнал является механическим, он получается в виде перемещения. Зависимость между входным и выходным сигналами чувствительного элемента, как правило, пропорциональна. Задающий элемент регулятора подает постоянный сигнал Хз.э на элемент сравнения. Величина этого сигнала соответствует величине выходного сигнала чувствительного элемента Хч. э, при которой регулируемый параметр (частота вращения) является заданным. Этот сигнал задающего элемента служит как бы эталоном, который позволяет учесть величину и знак отклонения регулируемого параметра от заданных значений. Обычно задающий элемент имеет устройство для изменения задания, позволяющее изменять величину сигнала задающего элемента X3.э в ту или иную сторону. Элемент сравнения сравнивает поданные на него встречные сигналы чувствительного элемента Хч. 3 и задающего элемента Хзэ и вырабатывает общий сигнал Увых, который передается на регулирующий орган. При равенстве подаваемых на элемент сравнения сигналов общий сигнал рассогласования равен нулю, т. е. на регулирующий орган команды не подается, и последний не перемещается. Регулирующий орган получает от элемента сравнения сигнал рассогласования и в зависимости от его значения и знака изменяет количество энергии или вещества, подводимого к объекту регулирования (количество подводимого топлива к ДВС). Как видно из рассмотренной схемы системы прямого автоматического регулирования, для перемещения регулирующего органа (рейки топливных насосов) энергия отбирается от самого объекта регулирования в виде энергии входного сигнала Хвх, которую чувствительный элемент преобразует в какое-то усилие ЛГЧ. э Таким образом, мощность сигнала Увых зависит от мощности сигнала чувствительного элемента (Увых<Хч.э)- Поэтому для получения Увых значительной величины необходимы большие габариты чувствительного элемента и регулятора прямого действия в целом. В связи с этим регуляторы прямого действия применяют для регулирования частоты вращения ДВС небольшой или средней мощности. Рассмотрим принцип действия автоматической системы прямого регулирования применительно к ДВС, снабженному регулятором частоты вращения прямого действия. При изменении нагрузки на двигатель изменяется и параметр, характеризующий эту нагрузку, т. е. частота вращения. В результате изменяется величина выходного сигнала чувствительного элемента Х ч.э элемент сравнения вырабатывает сигнал рассогласования Увых, который воздействует на регулирующий орган, и количество подаваемого в цилиндры двигателя топлива начинает изменяться. При увеличении нагрузки на двигатель его частота вращения уменьшается, и рейка топливных насосов перемещается в сторону увеличения подачи топлива; при уменьшении нагрузки на двигатель регулятор перемещает рейку топливных насосов в сторону уменьшения подачи. При изменении подачи топлива частота вращения коленчатого вала двигателя начнет изменяться в сторону приближения к заданному значению. Автоматическая система вновь придет в равновесие, когда частота вращения станет равна заданному значению, сигнал рассогласования на элементе сравнения будет равен нулю и регулирующий орган зафиксируется в каком-то положении.  Статические характеристики системы автоматического регулирования В этот момент нагрузка на двигатель будет соответствовать количеству подаваемого топлива, а частота вращения станет постоянной. Автоматическую систему можно вывести из равновесного состояния и путем изменения задания задающему элементу регулятора, т. е. путем изменения сигнала задающего элемента X з. э. В этом случае создается сигнал рассогласования на элементе сравнения, и последний подает сигнал Увых на рейку топливных насосов, вызывая ее перестановку и изменение подачи топлива. В результате частота вращения коленчатого вала двигателя изменяется и начинает приближаться к такому значению, при котором сигнал чувствительного элемента вновь уравняется с новым, заданным значением сигнала задающего элемента. Автоматическая система вновь придет в равновесное состояние, когда новый параметр объекта — частота вращения коленчатого вала двигателя — будет соответствовать новому значению сигнала задающего элемента. Как всякая материальная система, система прямого автоматического регулирования может находиться в двух состояниях: статическом, т. е. равновесном, когда все ее звенья находятся в относительном покое и величина регулируемого параметра не изменяется, и динамическом, когда все звенья системы находятся в движении и величина регулируемого параметра изменяется. Примером статического состояния является такое состояние системы, при котором количество подаваемого в цилиндры двигателя топлива соответствует внешней нагрузке; рейка топливных насосов в это время не перемещается, и частота вращения не изменяется. При переходе системы в динамическое состояние внешняя нагрузка на двигатель не соответствует количеству подаваемого в цилиндры топлива, при этом частота вращения коленчатого вала двигателя изменяется, и рейка топливных насосов перемещается, изменяя подачу топлива. Рассматривая равновесное состояние автоматической системы, можно определить величину входного сигнала, соответствующую каждому значению выходного сигнала, т. е. частоту вращения, соответствующую каждому положению рейки топливных насосов. Очевидно, что при каждой установившейся нагрузке будет поддерживаться определенная частота вращения. Построенный по этим значениям график называется статической характеристикой системы автоматического регулирования.  Виды переходных процессов при автоматическом регулировании частоты вращения дизелей Эта характеристика может быть двух видов — астатическая ( а) и статическая (, б). В первом случае любому значению нагрузки на двигатель (мощности Ne) в установившемся режиме соответствует одно и то же значение частоты вращения; во втором случае разным значениям нагрузки на двигатель в установившемся режиме соответствуют разные значения частоты вращения. Разность значений частоты вращения при установившемся режиме, замеренная при нулевой (холостой ход) и полной (100%-ной) нагрузках, называется статической ошибкой или зоной неравномерности автоматической системы. Для качественной оценки этой величины вводят понятие степень неравномерности, которая определяется отношением величины зоны неравномерности  к величине заданного параметра n3 Степень неравномерности к величине заданного параметра n3 Степень неравномерности  δ обычно определяется в процентах δ обычно определяется в процентах В астатических системах эта величина равна нулю, а в статических имеет значение, отличное от нуля. При регулировании частоты вращения дизелей она может достигать 15-20%. Динамическое состояние системы аналитически выражается дифференциальным уравнением, а графически — в виде графика, где по оси абсцисс откладывается время Т, с, а по оси ординат - значения параметра. При регулировании частоты вращения ДВС могут встретиться апериодический затухающий переходный процесс (а) и колебательный затухающий переходный процесс (б). 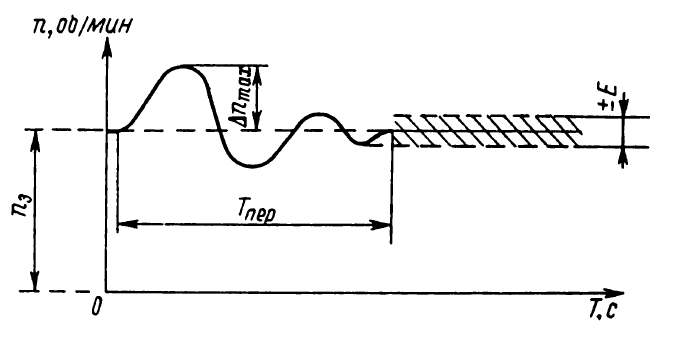 Качественные показатели переходного процесса По графику переходного процесса можно судить о качестве и показателях переходного процесса автоматической системы регулирования, руководствуясь следующими положениями: при установившемся (равновесном) режиме отклонение частоты вращения от заданного значения не должно превышать определенного предела ±Е, который называется зоной нечувствительности. Зона нечувствительности, отнесенная к величине заданного параметра (частота вращения) и выраженная в процентах, называется степенью нечувствительности ϵ: ϵ  Для судовых двигателей внутреннего сгорания ϵ=0,5  3% 3%время переходного процесса Т пер, т. е. период времени, по истечении которого отклонение частоты вращения от заданного значения не будет превышать ± Е, должно лежать в пределах, приемлемых для ДВС, и не должно превышать нескольких секунд; максимальное отклонение частоты вращения при переходном процессе не должно превышать заданного по техническим условиям значения. При регулировании частоты вращения судовых ДВС должно соблюдаться условие  заданного значения частот вращения. заданного значения частот вращения.Настройка регулятора на заданную частоту вращения. Настройка осуществляется изменением сигнала, подаваемого задающим элементом на элемент сравнения. Если изменить (например, увеличить) натяжение задающей пружины при помощи механизма изменения задания, то рейка топливных насосов переместится в сторону увеличения подачи топлива. Это вызовет увеличение частоты вращения ДВС. Наступит новое положение равновесия, при котором новому (большему) натяжению пружины будет соответствовать большая частота вращения, вызванная большей цикловой подачей топлива в цилиндры об/мин двигателя. При уменьшении натяжения пружины рейка топливных насосов переместится в сторону уменьшения подачи топлива. Произойдет уменьшение частоты вращения двигателя, и грузы регулятора начнут сходиться. Настройка регуляторов прямого действия при параллельной работе двигателей внутреннего сгорания. При параллельной работе ДВС на общую нагрузку необходимо, чтобы частота вращения всех двигателей была одинакова при любом значении общей нагрузки. В противном случае при изменении общей нагрузки изменится частота вращения каждого из параллельно включенных двигателей: двигатели, работающие с большей частотой вращения, окажутся перегруженными, а с менышей-недогруженными, и для согласования частот вращения придется с изменением общей нагрузки менять настройку на заданную частоту вращения каждого двигателя. Чтобы избежать этого, необходимо, чтобы статические ошибки (степень неравномерности) всех параллельно работающих двигателей были одинаковы, т. е. чтобы при всех значениях общей нагрузки регуляторы параллельно работающих двигателей поддерживали одинаковую частоту вращения. Другими словами, статические характеристики всех параллельно работающих двигателей должны совпадать. Однако обеспечить такое совмещение характеристик практически невозможно, так как по технологическим причинам жесткости задающих пружин однотипных регуляторов несколько различаются и статические характеристики их будут иметь разный наклон, т. е. их статическая ошибка будет различной. Кроме того, каждый регулятор частоты вращения имеет свою зону нечувствительности ±Е, в пределах которой частота вращения может произвольно отклоняться от заданного значения. Настройку регуляторов на параллельную работу выполняют следующим образом: каждый из регуляторов параллельно работающих двигателей настраивают на заданную частоту вращения в режиме холостого хода так, чтобы частота вращения всех двигателей была одинакова; поочередно нагружают каждый двигатель на полную нагрузку и замеряют его частоту вращения; увеличивают статическую ошибку двигателя, частота вращения которого выше (или уменьшают статическую ошибку двигателя, частота вращения которого ниже). После изменения статической ошибки необходимо вновь проверить и, если необходимо, вновь настроить регулятор на заданную частоту вращения при режиме холостого хода. Если регулятор одного из параллельно работающих двигателей не имеет механизма изменения статической ошибки, этого можно достичь путем изменения передачи от выходного звена регулятора к рейке топливных насосов. Заключение.Широкая автоматизация процессов управления судовой энергетической установкой - важнейшее средство не только поддержания высоких технико-экономических показателей ее эксплуатации, но и существенного сокращения числа обслуживающего персонала, создания благоприятных условий для выполнения производственных функции, и, следовательно, повышения эффективности труда персонала. Автоматизация судовых двигателей внутреннего сгорания (ДВС) на данном этапе достигла довольно высокой степени; она включает системы автоматического регулирования, управления, контроля, сигнализации и защиты. Одной из главных систем автоматического управления и регулирования современного судового ДВС является система автоматического регулирования частоты вращения коленчатого вала. К автоматическим системам ДВС согласно Правилам классификации и постройки морских судов Регистра СССР предъявляются следующие требования: каждый главный двигатель внутреннего сгорания должен иметь регулятор, настроенный таким образом, чтобы частота вращения коленчатого вала двигателя не могла превысить номинальное расчетное значение более чем на 15%; дополнительно к регулятору каждый двигатель мощностью 2,3 кВт (300 л. с.) и более, который может быть отключен или работает на винт регулируемого шага (ВРШ), должен иметь самостоятельный предельный выключатель, отрегулированный так, чтобы частота вращения коленчатого вала двигателя не могла превысить максимальное расчетное значение более чем на 20%; регуляторы частоты вращения вспомогательных двигателей при мгновенном сбросе 100% нагрузки или частичном увеличении нагрузки не должны допускать превышения частоты вращения более чем на 10% номинальной. Установившаяся по истечении 5 с. частота вращения не должна отличаться от частоты вращения предшествующего режима более чем на 5% номинальной частоты вращения коленчатого вала двигателя; колебания установившейся частоты вращения дизель-генераторов переменного тока при нагрузках от 25 до 100% номинальной электрической мощности должны находиться в пределах 1% номинальной частоты вращения; Автоматика современных судов не ограничивается системами автоматизации главными судовыми и вспомогательными энергетическими установками. Большое значение в последнее время приобретает автоматизация судовых систем, включающая применение как отдельных регуляторов и локальных устройств управления, так и развитие систем дистанционного автоматизированного управления судовыми системами. Список литературыАвтоматизация судовых энергетических установок: Справочное пособие / Под ред. Р.А. Нелепина. Л.: Судостроение, 1975. 534 с. Бабиков М.А., Косинский А.В. Элементы и устройства автоматики: Учебное пособие. М.: Высшая школа, 1973. 154 с. Исаков Л.И. Устройство и обслуживание судовой автоматики: Справочник. Л.: Судостроение, 1989. 293 с. Крутов В.И. Автоматическое регулирование двигателей внутреннего сгорания. М.: Машиностроение, 1989. 615 с. Кутьин Л.И., Исаков Л.И. Комплексная автоматизация судовых дизельных и газотурбинных установок.Л.: Судостроение, 1984. 387 с. Кутьин Л.И. Автоматизация судовых и газотурбинных установок: Учебное пособие для вузов. Л.: Судостроение, 1973. 122 с. Ланчуковский В.И., Козьминых А.В. Автоматизированные системы управления судовых дизельных и газотурбинных установок. М.: Транспорт, 1990. 335 с. Левин М.И. Автоматизация судовых дизельных установок. Л.: Судостроение, 1969. 465 с. Онасенко В.С. Судовая автоматика. Учебник: М.: Транспорт, 1988. 272 с. Печененко В.И., Козьминых Г.В. Автоматика регулирования и управления судовыми силовыми установками. М.: Транспорт, 1973. 214 с. Печененко В.И., Козьминых Г.В. Основы автоматики и комплексная автоматизация судовых пароэнергетических установок: Учебное пособие. М.: Транспорт, 1979. 262 с. Сыромятников В.Ф. Эксплуатация систем автоматического регулирования судовых силовых установок. М.: Транспорт, 1975. 272 с. Сыромятников В.Ф. Основы автоматики и комплексная автоматизация судовых пароэнергетических установок: Учебник М.: Транспорт,1983. 312 с. Сыромятников В.Ф. Наладка автоматики судовых энергетических установок: Справочник. Л.: Судостроение, 1989. 351с. Калининград 2023 г. |