БОЧКАРЕВ 29.06) (2). Автоматическое управление
 Скачать 299.41 Kb. Скачать 299.41 Kb.
|

|
Самарской области «ТОЛЬЯТТИНСКИЙ ХИМИКО-ТЕХНОЛОГИЧЕСКИЙ КОЛЛЕДЖ» Специальность 15.02.07 Автоматизация технологических процессов и производств (по отраслям) КУРСОВОЙ ПРОЕКТ по МДК 04.01 Теоретические основы разработки и моделирования несложных систем автоматизации с учетом специфики технологических процессов на тему: АВТОМАТИЧЕСКОЕ УПРАВЛЕНИЕ ПРОЦЕССОМ ПОЛУЧЕНИЕ ПАРОВ В КОТЛЕ - УТИЛИЗАТОРЕ Студент группы АТП 328 ___________________ М.В. Бочкарев Подпись, дата Оценка выполнения и защиты КП ___________________ Руководитель проекта ___________________ Л.А.Хавкина Подпись, дата Тольятти 2021 ГБПОУ Самарской области «Тольяттинский химико-технологический колледж» Задание № 02 на курсовой проект по МДК 04.01 Теоретические основы разработки и моделирования несложных систем автоматизации с учетом специфики технологических процессов студенту Бочкарев Матвей Владимирович________________________________________ курс__3__группа__ АТП 328 специальность 15.02.07 1.Тема курсового проекта автоматическое управление процессом получение паров в котле- утилизаторе__________________________________________ Исходные данные статическая характеристики передаточная функция статическая характеристика передаточная функция объекта управления регулятора   датчика  исполнительного механизма исполнительного механизма   1 Технологическая часть 1 Технологическая часть1.1 Описание технологического процесса. Классификация технологического объекта и системы автоматического управления 1.2 Описание выбранных систем автоматического контроля и регулирования 1.3 Выбор сигнализируемых параметров, параметров защиты и блокировки 1.4 Датчик температуры Метран -281 2 Расчетная часть 2.1 Построение статических характеристик устройств системы управления 2.2 Определение графическим методом общей статической характеристики цепи обратной связи – ДРИМ. 2.3 Построение статических характеристик объекта регулирования и системы управления 2.4 Определение аналитического выражения «регулирующей системы – ДРИМ» 2.5 Нахождение аналитическим способом рабочей точки системы 2.6 Определение передаточных функций элементов системы 2.7 Определение передаточной функции системы регулирования 2.8 Определение временной функции переходного процесса и критерия устойчивости САР по характеристическому уравнению 2.9 Определение параметров устойчивости системы автоматического управления по годографу 3 Заключение 4 Графическая часть Схема автоматизации функциональная (С2) Схема подключений СИ и А (С4) Дата выдачи задания «_____» ________________________ 20 г. Срок окончания проекта «_____» ________________________ 20 г. Преподаватель ______________________ Хавкина Л.А. Задание принял к исполнению «____» _______ 20 г. СОДЕРЖАНИЕ Введение………………………………………………………………………… N 1 Технологическая часть 1.1 Описание технологического процесса. Классификация технологического объекта и системы автоматического управления ………………………… ..N 1.2 Описание выбранных систем автоматического контроля и регулирования..N 1.3 Выбор сигнализируемых параметров, параметров защиты и блокировки…N 1.4 Назначение, технические характеристики, устройство микропроцессорного измерительного регулятора типа Метакон-281………………………………………………………. …..N 2 Расчетная часть 2.1 Построение статических характеристик устройств системы управления...N 2.2 Определение графическим методом общей статической характеристики цепи обратной связи – ДРИМ ………………………………………………..N 2.3 Построение статических характеристик объекта регулирования и системы управления …………………………………………………………N 2.4 Определение аналитического выражения « регулирующей системы – ДРИМ»………………………………………………………………N 2.5 Нахождение аналитическим способом рабочей точки системы …………… N 2.6 Определение передаточных функций элементов системы ………………… 2.7 Определение передаточной функции системы регулировании…………....N 2.8 Определение временной функции переходного процесса и критерия устойчивости САР по характеристическому уравнению ……………………… N 2.9 Определение параметров устойчивости системы управления по годографу…N Заключение……………………………………………………………………….N Список информационных источников …………………………………………...N   ВВЕДЕНИЕ ВВЕДЕНИЕТеория автоматического управления и регулирования – это наука об общих принципах построения автоматических систем, т.е. систем, состоящих из отдельных машин, агрегатов, линий, цехов или заводов и выполняющих свои задачи без непосредственного участия человека. Автоматизация есть внедрение методов и средств теории автоматического управления и регулирования для превращения неавтоматических процессов в автоматические. Принципы построения автоматических систем управления связаны с общими законами управления, значение которых выходит далеко за пределы технических задач. Автоматическим регулированием называется поддержание или изменение по некоторому заданному закону параметров, характеризующих технологический процесс. Осуществляется путём измерения состояния объекта, действующих на него возмущений и воздействия на регулирующий орган объекта. Современные системы автоматизированного управления технологическими процессами (АСУ ТП) химической промышленности повышают: возможности регулировать качество продукции предприятия химической промышленности согласно требованиям ее технологического регламента; надежность работы оборудования предприятия химической промышленности, возможности предупреждения его поломок с целью своевременного проведения плановых ремонтов, на основе предоставляемых информационных и программных средств автоматизации. Целью проекта автоматическое управление процессом получения пара в котле утилизаторе является частичная замена устаревших приборов современные, что обеспечит высокую скорость передачи сигнала, повысит точность измерений, даст возможность преобразовывать сигнал в дискретный и использовать вычислительную техник.  1 ТЕХНОЛОГИЧЕСКАЯ ЧАСТЬ 1 ТЕХНОЛОГИЧЕСКАЯ ЧАСТЬ1.1 Описание технологического процесса. Классификация технологического объекта и системы автоматического управления Получение паров в котле - утилизаторе Описание технологического процесса автоматическое управление процессом получение паров в котле - утилизаторе Сопротивление конвертора позиции 110 измеряется препадометром – dPI – 1011 не более 1,0 кг/см2 с регистрацией в ЦПУ. Конвертированный газ после конвертора позиции 110 с температурой не более 1010 C по проходит по межтрубному пространству снизу вверх в двух параллельно работающих котлах-утилизаторах пепрвой ступени позиции 11 А/Б, охлаждается до температуры 380-480 C , а затем в котле-утилизаторе второй ступени позиции 112, в котором ход газа осуществляется по трубному пространству снизу вверх до температуры 330-380 C по TIRCA-2 и направляется на конверсию окиси углерода. В котлах-утилизаторах 111 А/Б и 112 получается пар с давлением 102-109 кгс/см2. Температура газа после котла-утилизатора второй ступени позиции 112 поддерживается регулятором TIC-2 путем перепуска газа по байпасу мимо котла-утилизатора позиция 112. Для обеспечения работы регулятора TIC-2 в определённом диапазоне температуры имеется ручная заспорка BFV-1 на выходе конвертированного газа из котла 112 для перераспределения потока газа через котел-утилизатор 112. Прибор TIRCA также сигнализирует в ЦПУ о минимальной 325 C и максимальной 390 C температуре конвертированного газа после котла утилизатора позиции 112. После котла утилизатора 112 имеется ручная свеча для сброса воздуха или пара в атмосферу по линии. Кроме того, после котла 112 предусмотрен сброс газа на факел через электрозадвижку HCV-12, управляемую кнопкой с ЦПУ Для защиты металла от высоких температур передаточный коллектор, конвертор метана позиции 110 и котлы-утилизаторы позиции 111 А/Б футерованы огнеупорным бетоном и снабжены водяными рубашками. Подпитка рубашек производится турбинным конденсатом от насосов позиции 426. В случае прекращения подачи турбинного конденсата в рубашки подается по байпасу отсекателя LCV-1, так чтобы был постоянный перелив конденсата через рубашку, а в рубашки котлов позиции 111 А/Б конденсат подается по байпасу отсекателей LCV-21 и LCV-22 соответственно так, чтобы был постоянный перелив через рубашки. В случае снижения уровня в рубашках позиции 110,11 А/Б автоматически открываются отсекатели закрываются путем нажатия кнопки с ЦПУ и подпитка рубашек продолжается по байпасам отсекателей. При снижении расхода турбинного конденсата в рубашких позиции 110 до 5 м3/час, а в рубашки 111А или 111Б до 1,5 м3/час на каждый аппарат срабатывает предупредительная сигнализация QRA-12, QRA-22, QRA-23 соответственно. Рубашки передаточного коллектора, вторичного риформинга и котлов-утилизаторов 111 А/Б снабжены дренажами для периодического сброса части воды для удаления шлама. Температура металла корпуса конвертора метана позиции 110 1.1.2 Классификация технологического объекта и системы автоматического управления. По типу технологического процесса автоматическое управление процессом получение пара в котле – утилизаторе. Показателем эффективности химического процесса автоматическое управление пара в котле утилизаторе Цель управления – поддержание температуры воды в котле утилизаторе Процесс получения пара в котле утилизаторе является непрерывным. По функциональному назначению система автоматического управления (САУ) относится к автоматической системе управления и регулирования Описание выбранных систем автоматического контроля и регулирования цель управления процессом получение паров в котле - утилизаторе В результате работы процесса могут возникать следующие возмущения: - повышения давления в трубопроводе - изменение температуры в трубопроводе - изменение уровня в емкостных хранилищах Описание выбранных систем автоматического контроля и регулирования: - температура воды до 380◦ в котел утилизатор (поз. 3а и 4а,5а,:А) - температура пара на выходе из котла утилизатора …480◦ (поз. 1а) - температура на входе в котла утилизатора ( поз. 1а) - давление на выходе из конденсатора 3.0 МПа (поз. 15а) -анализ конвертированного газа на выходе из котла утилизатора (поз. 16а)  Устройство сигнализации предназначено для автоматического оповещения персонала об отклонение параметров за допустимые пределы путём подачи световых и звуковых сигналов Устройство сигнализации предназначено для автоматического оповещения персонала об отклонение параметров за допустимые пределы путём подачи световых и звуковых сигналов В проекте сигнализации подлежат: - максимальный и минимальный температура на выходе из котла утилизатора (поз. 1а ) Назначение, технические характеристики, устройство датчика температуры Метран 281. Коммуникационный протокол HАRT обеспечивает двухсторонний обмен информацией между Метран 281 и управляющими устройствами: ручным портативным HARкоммуникатором Метран650; компьютером, оснащенным HARTмодемом Метран681 и программой HARTMaster; любым средством управления HART полевыми устройствами, например, коммуникатором 475 (см. каталог "Средства коммуникации. Функциональная аппаратура"). Управление ПТ осуществляется дистанционно, при этом обеспечивается настройка датчика: выбор его основных параметров; перенастройка диапазонов измерений; запрос информации о самом ПТ (типе, модели, серийном номере, максимальном и минимальном диапазонах измерений, фактическом диапазоне измерений). Первичные преобразователи: - ТСП (Pt100) с возможностью измерения температуры до 500°С; Межповерочный интервал: - 4 года - для Метран-281 Многоточечный режим работы ПТ Метран281 В многоточечном режиме Метран 281 работает только с цифровым выходом. Аналоговый выход автоматически устанавливается в 4 мА и не зависит от значения входной температуры. Информация о температуре считывается по НАRТ протоколу.Кодной паре проводов может быть подключено до 15 датчиков. Их количество определяется длиной и параметрами  2 РАСЧЕТНАЯ ЧАСТЬ Разработать систему автоматического регулирования, исследовать САУ на устойчивость в статическом и динамическом режимах Исходные данные статическая характеристики передаточная функция статическая характеристи передаточная функция объекта управления . регулятора датчика исполнительного механизма  2.1 Построение статических характеристик устройств системы управления В соответствии с заданием курсового проекта имеем статическую характеристику объекта регулирования, которая описывается уравнением Yо = 2- Хо Для построения статической характеристики объекта необходимо задавать текущие значения для Хо. Достаточно определить две точки, чтобы построить характеристику: при Хо=0, Yo =2; при Хо=2, Yo = 0,. По этим двум точкам построена прямая в координатах Хо, Yо. Построения производить в программе Excel  Согласно заданию студенту необходимо выбрать из справочных данных элементы, которые образуют цепь обратной связи в системе автоматического регулирования, т.е. статические характеристики датчика, регулятора и исполнительного механизма (задаются преподавателем) В примере статическая характеристика датчика описывается уравнением Yд=0.86*Xд  Для построения этой статической характеристики задаются значения входной величины Хд: 0, 1, 2 и вычисляются значения выходной величины Yд :0; 0.86, 1.72; Для построения этой статической характеристики задаются значения входной величины Хд: 0, 1, 2 и вычисляются значения выходной величины Yд :0; 0.86, 1.72;  По этим значениям строится статическая характеристика датчика. Если она оказывается нелинейной, то её аппроксимируем прямой линией Статическая характеристика регулятора описывается уравнением Yр=0.86*Xр Для построения этой статической характеристики задаются значения входной величины Хр: 0, 1 и вычисляются значения выходной величины Yр :0 и 0.86 ; По этим значениям строится статическая характеристика регулятора.   Статическая характеристика исполнительного механизма описывается уравнением Статическая характеристика исполнительного механизма описывается уравнениемYим= 1.7 Xим Для построения этой линейной статической характеристики достаточно задать два значения: при Хим = 0 получим Y им = 0, а для Хим = 1, получим Yим = 1,7.  2.2 Определение графическим методом общей статической характеристики цепи обратной связи – ДРИМ Для этого изобразим статические характеристики этих звеньев на общей плоскости. В первом квадранте находится статическая характеристика датчика, во втором – регулятора, в третьем – исполнительного механизма. Для определения результирующей статической характеристики разбиваем ось Хд на равные отрезки от 1 до 3. Из точек 1,2,3, проводим перпендикуляры до пересечения с линейной статической характеристикой датчика. Получаем точки А1, В1, С1 . Из этих точек проводим горизонтали до пересечения со статической характеристикой регулятора в точках А2,В2, С2. Из этих точек опускаем перпендикуляры до пересечения с характеристикой исполнительного механизма, получаем точки А3, В3 С3 . Горизонтальное положение оси Yр меняется на вертикальное. Из новых точек проводим горизонтали до пересечения с соответствующими перпендикулярами из точек А1,В1, С1 .       Соединяя точки А4,В4 и С4, получим результирующую статическую характеристику обратной связи – ДРИМ. 2.3 Построение статических характеристик объекта регулирования и системы управления Для определения взаимосвязи между статическими характеристиками объекта и ДРИМ изобразим их в одной системе координат. В результате эти две статические характеристики пересекутся в точке А. Эта точка называется рабочей. Угол пересечения этих двух статических характеристик равен 87  . .Из теории автоматического регулирования известно, что при пересечении двух статических характеристик под углом от 60 до 90о система характеризуется хорошей устойчивостью. По графику находится угол пересечения статических характеристик равный 65о , т.е делается вывод: система характеризуется хорошей устойчивостью.   Для расчета динамического коэффициента регулирования D рассматривается общая статическая характеристика объекта и ДРИМ. Для расчета динамического коэффициента регулирования D рассматривается общая статическая характеристика объекта и ДРИМ.Устанавливаются координаты рабочей точки А (1,5; 0.3) ПО ГРАФИКУ ЗНАЧЕНИЯ ДРУГИЕ, определяется возможный диапазон изменений входного параметра от 0 до 1,5 т.е ΔХвх = 1,5, диапазон изменений выходного сигнала от 0 до 3,5. Подставим эти значения в выражение D = ΔY / ΔXвх D = 15,5 / 1,5 = 0.45 Из теории автоматического управления известно, что при D =1 система имеет оптимальную передачу сигнала в замкнутом контуре, при D > 1 в цепь обратной связи следует включить ослабитель сигнала; при D< 1 в цепь обратной связи следуетвключить усилительный элемент Для получения динамического коэффициента равного единице, в цепь обратной связи включается ослабительный элемент с коэффициентом передачи K=1/D К=1/0.45 = 2.1 2.4 Определение аналитического выражения регулирующей системы – ДРИМ . Из структурной схемы управления видно, что Yд = Хр; Yр = Хим Подставим уравнение датчика в уравнение регулятора, а полученное результирующее уравнение подставим в уравнение исполнительного механизма: Yр=0.86*0.86Xд=0.7Xд Yим=2 *0,86*0.86Xд=1,4Xд Yим =1.4Xд Это выражение является статической характеристикой цепи обратной связи, полученной аналитическим способом. Оно также описывает статическую характеристику цепи обратной связи, полученную ранее графическим способом. 2.5 Нахождение аналитическим способом рабочей точки системы Для определения координат рабочей точки системы по аналитическому выражению строится структурная схема полученной системы в виде двух элементов с целью определения взаимосвязи регулирующих параметров.  Поскольку статические характеристики представляются прямыми линиями, то необходимо найти точку пересечения двух прямых линий, которые задаются уравнениями Yим =1,4Xд Уо = 2 – Хо Заменим Уим, Уо на У; Хд, Хо заменим на Х Решается система уравнений и определяются координаты рабочей точки A Y =1,4X У = 2 – Х Х=1,2; У= 15,8 Координаты рабочей точки А совпадают при исследовании графическим и аналитическим методами. 2.6 Определение передаточных функций элементов системы Определение передаточных функций относится к расчету динамических параметров системы. Передаточная функция объекта регулирования задана формулой  = =  0.6/p 0.6/pПередаточная функция датчика  Wд= Wд=  = =  Передаточная функция регулятора Wp=  Передаточная функция исполнительного механизма Wим= Так как звенья включены последовательно, то для определения передаточной функции обратной связи передаточные функции звеньев перемножаются Wос(р) = Wд(p)*Wр(p)*Wим(p)* Wк Wос(р)=  = = 2.7 Определение передаточной функции системы регулирования Для определения передаточной функции системы воспользуемся выражением Wc(p) =  Подставим в это выражение все составляющие передаточные функции и преобразуем результирующее выражение: Wc(p)=  Для нахождения временной функции переходного процесса упростим выражение, исключив из выражения передаточной функции в числителе  , а в знаменателе , а в знаменателе  . . Передаточная функция примет вид Wпер(p) =  и представляет собой частотную характеристику переходного процесса, которая характеризует реакцию системы на входной гармонический сигнал. 2.8 Определение временной функции переходного процесса и критерия устойчивости САР по характеристическому уравнению  Устойчивость системы определяется по положению характеристических корней Устойчивость системы определяется по положению характеристических корней  и и  на координатной плоскости (в координатах мнимых Im и действительных Re чисел). Для определения корней характеристического уравнения приравняем к нулю знаменатель на координатной плоскости (в координатах мнимых Im и действительных Re чисел). Для определения корней характеристического уравнения приравняем к нулю знаменатель  Решение уравнения  Найдем дискриминант уравнения  p1= -0.12 +0,7i p2 = - 0.12 – 0,7i По критерию Ляпунова, если два положения корней находятся в отрицательной плоскости относительно оси Im , то система устойчива, чем дальше положение корней от оси Im, тем более устойчива система управления + Im   -  Re_____________________________________+Re Re_____________________________________+ReIm Это показывает, что под влиянием изменения на входе, в системе возникает регулирующее воздействие, при котором система стремится к своему первоначальному состоянию. Определение параметров устойчивости системы управления по годографу Устойчивость замкнутой системы определяется, используя амплитудно-фазовую частотную характеристику АФЧХ – годограф. Передаточная функция всей системы имеет выражение Wc (p) =  Устойчивость системы определяется по критерию Найквиста.  В выражении В выражении  заменим оператор Лапласа р на jw. заменим оператор Лапласа р на jw. Y=  Y=  Уравнение разделяется на действительную и мнимую части: Re (w) =  Im (w) = 0.6w-2  Для определения реперных точек годографа приравняем мнимую часть к нулю и определим частоты Im (w) = 0 0.6w-2 =0  Подставим положительные значения этих частот в выражение действительной части: Re (0,54) = 4,8 -2,2*  4.43 4.43Re (0) = 4,8 Определяются частоты при условии, что действительная часть равна нулю: Re (w) = 0 =0 Вводится новая переменная  и получается квадратное уравнение и получается квадратное уравнение При решении этого уравнения убедимся, что оно имеет мнимые корни. Это значит, что годограф не пересекает мнимую ось. Теперь определим поведение годографа при частотах w >0,54. Для этого возьмём значение частоты w = 0,6. В результате получим Re (0.6) = 4,1 Im (0.6) = -3,6 Все определённые точки нанесем на чертеж. На плоскости системы координат устанавливаем найденные точки с указанием, к какой частоте они принадлежат. Соединяем реперные точки, двигаясь в сторону увеличения частоты. Таким образом, получается кривая годографа. 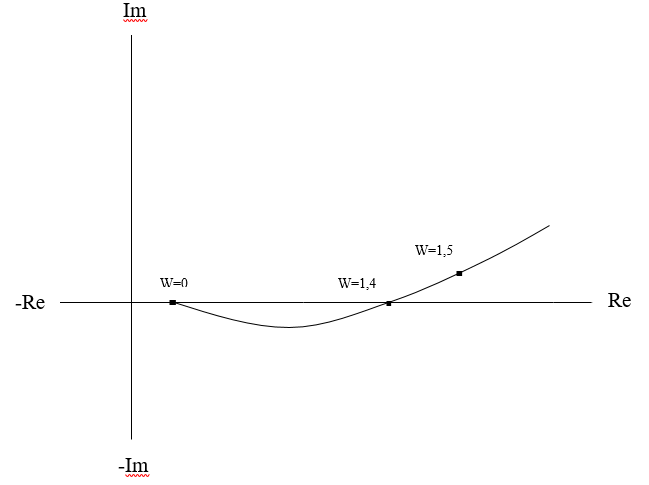 Согласно критерию Найквиста кривая не должна пересекать ось Re в отрицательной полуплоскости за пределами точки (-1, i0). Из этого критерия следует, что данная САР устойчива.  СПИСОК ИСПОЛЬЗОВАННЫХ ИСТОЧНИКОВ СПИСОК ИСПОЛЬЗОВАННЫХ ИСТОЧНИКОВ 1. Дворецкий Е.М. Муромцев Ю.А.Моделирование систем. М.: Издательский центр «Академия», 2015 2. Келим Ю.М. Типовые элементы систем автоматического управления. Учебное пособие для студентов учреждений среднего профессионального образования. М.: Форум: ИНФРА-М, 2015 3. Горошков Б.И. Автоматическое управление. М., ИЦ «Академия», 2003. 4. Клюев А.С., Глазов Б.В., Дубровский А.Х. Проектирование систем автоматизации технологических процессов. Справочное пособие, М., Энергоатомиздат, 1990г. 5. Нестеров А.Л. Проектирование АСУТП. Методическое пособие. Книга 1,2.- СПб.: Издательство ДЕАН, 2010 Интернет-ресурсы https://my-shop.ru/shop/books/2741173.html avidreaders.ru/.../avtomatizaciya-tehnologicheskih-processov-i-sistemy-avtomatichesk https://biblio-online.ru/book/7E4B1D44-CA39-4561-B0F4-E239322DFD47 |