Изучение принципов формирования системы автоматизации: порядка монтажа, ремонта, наладки основных элементов системы на предприят. Ушаков_КП_4. Автоматизации и управления производства мороженого на предприятии ооо Нестле Россия
 Скачать 1.37 Mb. Скачать 1.37 Mb.
|

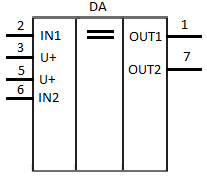
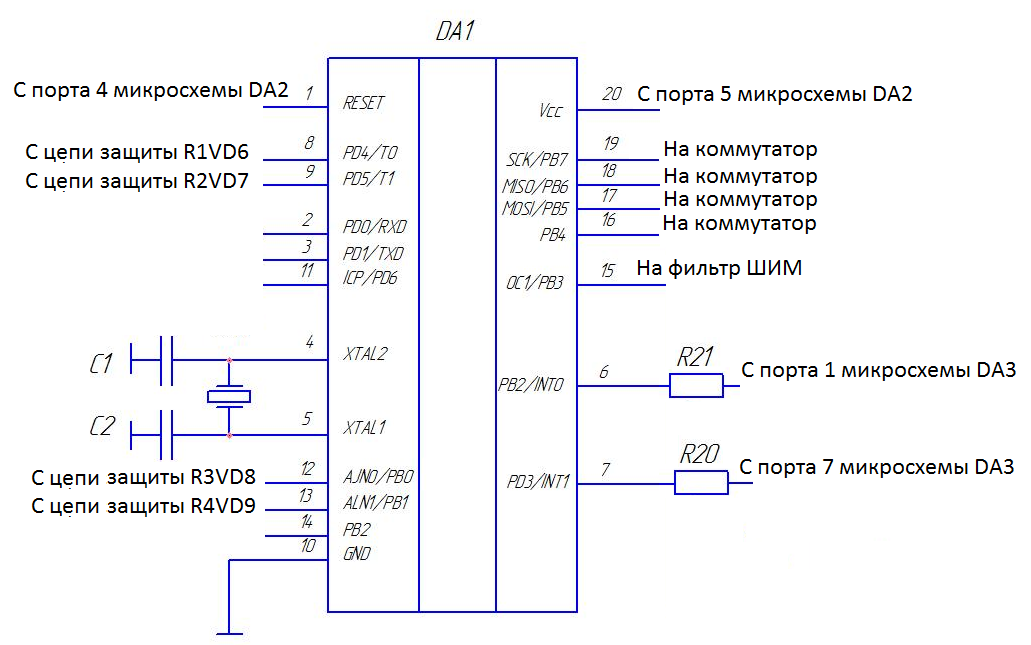
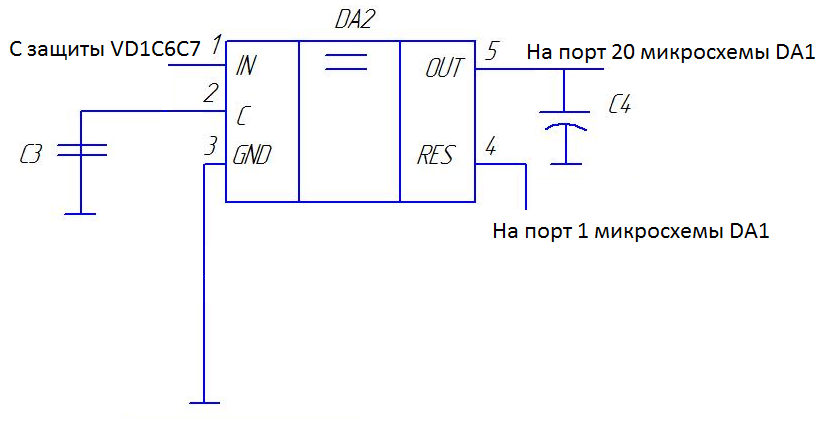
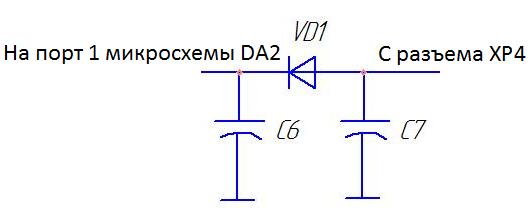
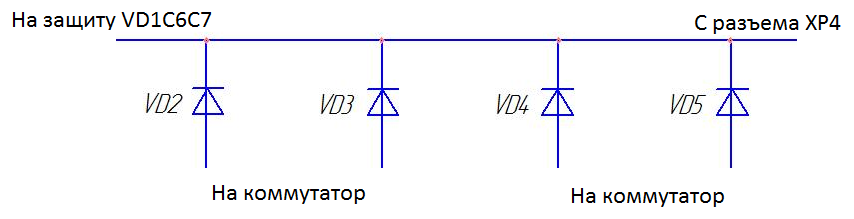
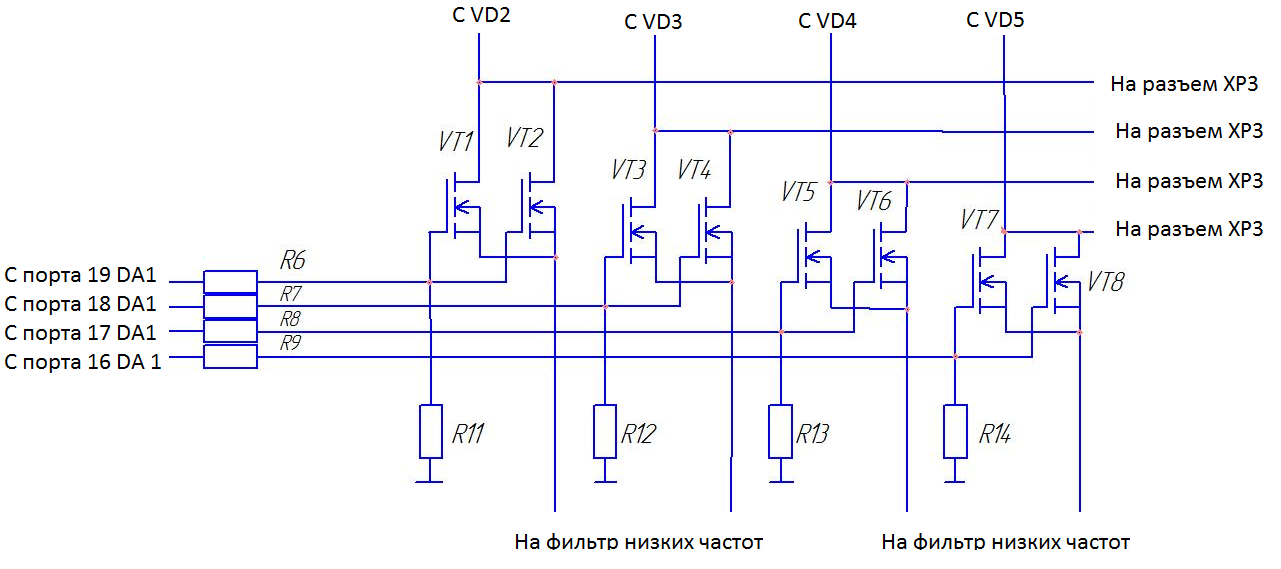
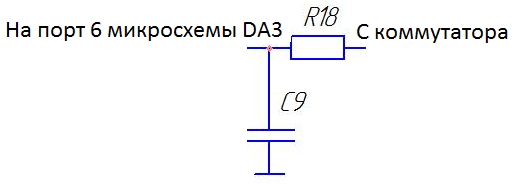
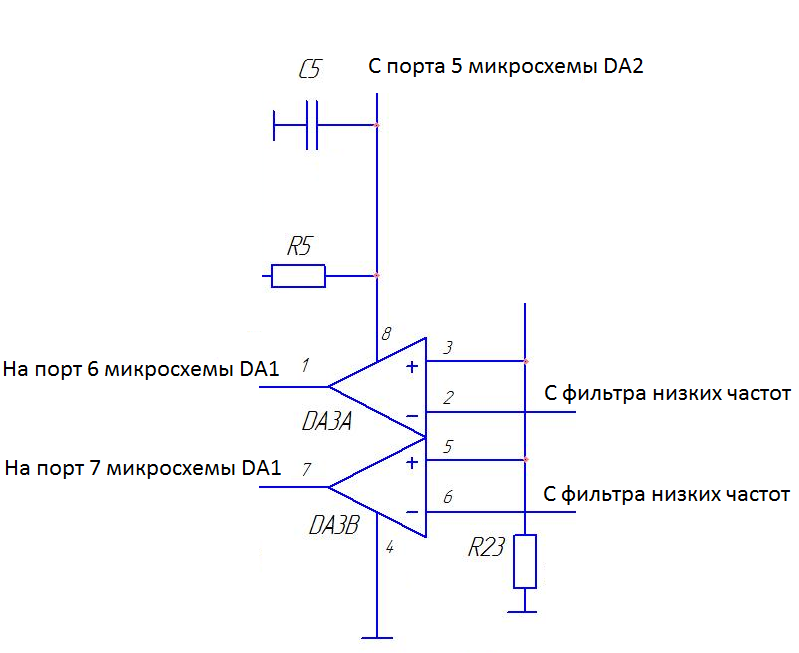
18 V;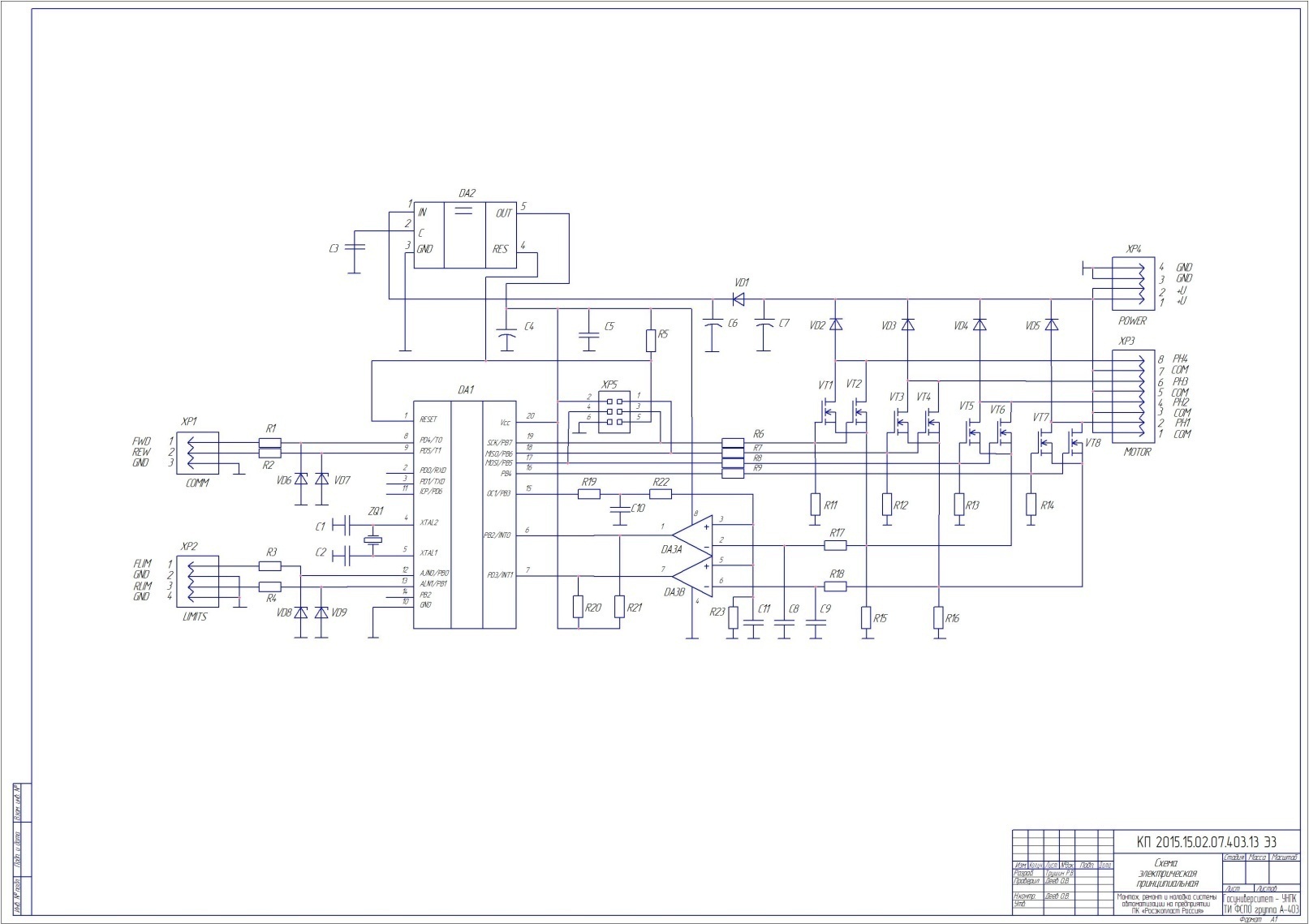 Рисунок 2.1 – Схема электрическая принципиальная Основой устройства является микроконтроллер DA1 типа AT90S2313 фирмы Atmel. Сигналы управления обмотками двигателя формируются на портах PB4 – PB7 программно. Для коммутации обмоток используются по два включенных параллельно полевых транзистора типа КП505А, всего 8 транзисторов (VT1 – VT8). Эти транзисторы имеют корпус TO-92 и могут коммутировать ток до 1.4А, сопротивление канала составляет около 0.3 Ом. Для того, чтобы транзисторы оставались закрытыми во время действия сигнала «сброс» микроконтроллера, между затворами и истоками включены резисторы R11 – R14. Для ограничения тока перезарядки емкости затворов установлены резисторы R6 – R9. Спад тока фаз обеспечивается шунтированием обмоток двигателя диодами VD2 – VD5. Для подключения шагового двигателя имеется 8-контактный разъем XP3, который позволяет подключить двигатель, имеющий два отдельных вывода от каждой обмотки. Для двигателей с внутренним соединением обмоток один или два общих контакта разъема останутся свободными. Стабилизация тока осуществляется с помощью ШИМ, которая реализована программно. Для этого используются два датчика тока R15 и R16. Сигналы, снятые с датчиков тока, через ФНЧ R17C8 и R18C9 поступают на входы компараторов U3A и U3B. ФНЧ предотвращают ложные срабатывания компараторов вследствие действия помех. На второй вход каждого компаратора должно быть подано опорное напряжение, которое и определяет пиковый ток в обмотках двигателя. Это напряжение формируется микроконтроллером с помощью встроенного таймера, работающего в режиме 8-битной ШИМ. Для фильтрации сигнала ШИМ используется двухзвенный ФНЧ R19C10 и R22C11. Выходы компараторов подключены к входам прерываний микроконтроллера INT0 и INT1. Для управления работой двигателя имеются два логических входа: FWD (вперед) и REW (назад), подключенных к разъему XP1. При подаче низкого логического уровня на один из этих входов, двигатель начинает вращаться на заданной минимальной скорости, постепенно разгоняется с заданным постоянным ускорением. Разгон завершается, когда двигатель достигает заданной рабочей скорости. Если подается команда изменения направления вращения, двигатель с тем же ускорением тормозится, затем реверсируется и снова разгоняется. Кроме командных входов, имеются два входа для концевых выключателей, подключенных к разъему XP2. Концевой выключатель считается сработавшим, если на соответствующем входе присутствует низкий логический уровень. При этом вращение в данном направлении запрещено. При срабатывании концевого выключателя во время вращения двигателя он переходит к торможению с заданным ускорением, а затем останавливается. Командные входы и входы концевых выключателей защищены от перенапряжений цепочками R1VD6, R2VD7, R3VD8 и R4VD9, состоящими из резистора и стабилитрона. Питание микроконтроллера формируется с помощью микросхемы стабилизатора 78LR05, которая одновременно выполняет функции монитора питания. При понижении напряжения питания ниже установленного порога эта микросхема формирует для микроконтроллера сигнал «сброс». Питание на стабилизатор подается через диод VD1, который вместе с конденсатором C6 уменьшает пульсации, вызванные коммутациями относительно мощной нагрузки, которой является шаговый двигатель. Питание на плату подается через 4-контактный разъем XP4, контакты которого задублированы. 2.1.2 Структурная схема Схема структурная (рисунок 2.2) представлена следующими узлами: микроконтроллер (DA1); шунтирование обмоток (VD2…VD5); коммутатор (VT1VT2R6R11…VT7VT8R9R14); датчики тока (R15 и R16); компаратор (DA3); фильтр низких частот (R17C8 и R18C9); фильтр ШИМ (R19C10 и R22C11); разъемы (ХР1…ХР4); цепь защиты (R1VD6…R4VD9); стабилизатор (DA2); защита (VD1C6); 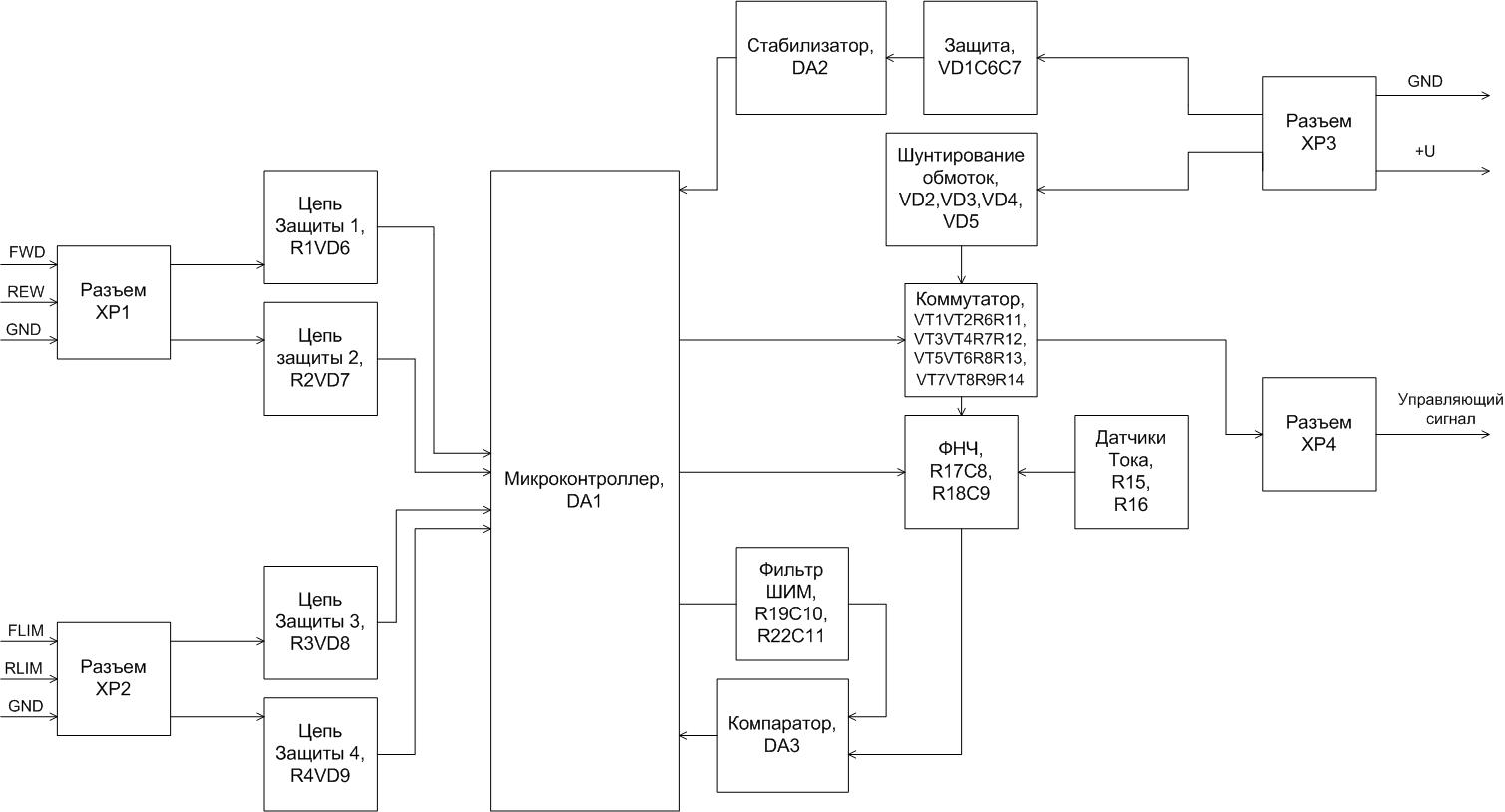 Рисунок 2.2 – Структурная схема 2.2 Элементная база 2.2.1 Микроконтроллер DA1 AT90S2313 Микроконтроллер AT90S2313 – это 8-ми разрядный AVR® микро-контроллер фирмы Atmel с 2 Кбайт Flash памятью с поддержкой внутрисистемного программирования. Отличительные особенности: AVR® – высокая производительность и RISC архитектура с низким энергопотреблением; 118 мощных инструкций – большинство из них выполняются за один такт; 2 Кбайт Flash- памяти с поддержкой внутрисистемного программирования SPI- последовательный интерфейс для загрузки программного кода; ресурс: 1000 циклов записи/ стирания; 128 байта EEPROM; рабочие регистры общего назначения 32х8; 15 программируемых линий I/O; питание VCC: от 2.7 В до 6.0 В; полностью статический режим работы: от 0 до 10 МГц, при питании от 4.0 В до 6.0 В; от 0 до 4 МГц, при питании от 2.7 В до 6.0 В; производительность, вплоть до 10 MIPS при 10 МГц; один 8-ми разрядный таймер/ счетчик с отдельным предварительным делителем частоты; один 16-ти разрядный таймер/ счетчик с отдельным предварительным делителем частоты с режимами сравнения и захвата; полнодуплексный UART; выбираемые 8, 9, или 10-ти разрядные режимы широтно- импульсной модуляции (ШИМ); внешние и внутренние источники прерывания; программируемый следящий таймер с встроенным тактовым генератором; встроенный аналоговый компаратор; экономичные режимы ожидания и пониженного энергопотребления; программируемая блокировка для безопасности программного обеспечения; 20 выводов. 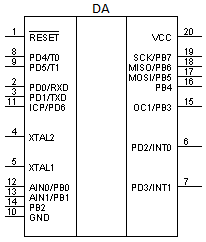 a) a)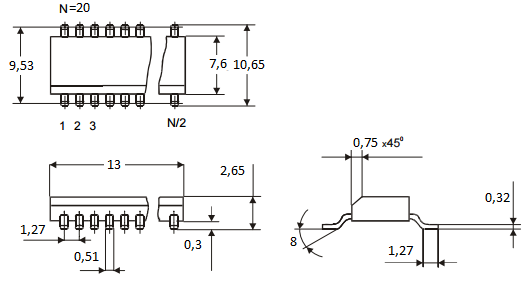 б) б)Рисунок 2.3 – Микроконтроллер DA1 AT90S2313: а – УГО; б – конструктив 2.2.2 Стабилизатор напряжения DA2 L78LR05 Стабилизатор напряжения L78LR05 используется в данной схеме и как монитор питания. При понижении напряжения питания ниже установленного порога эта микросхема формирует для микроконтроллера сигнал «сброс». Технические характеристики: производитель – NJR; regulator Topology – Positive Fixed; выходное напряжение – 5В; входное напряжение – 7,5…18 В; падение напряжения – 1,5 В при 40 мА; количество регуляторов – 1 выходной ток – 100мА; корпус – 8-DMP; тип монтажа – поверхностный монтаж. 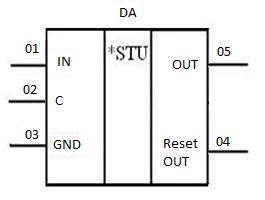 а) а) 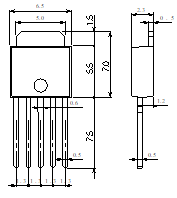 б) б)Рисунок 2.4 – Стабилизатор напряжения L78LR05: а – УГО; б – конструктив. 2.2.3 Компаратор DA3 LM393 Эти приборы состоят из двух независимых низких компараторов напряжения, разработанных специально для работы от одного источника питания в широком диапазоне напряжений. Эти компараторы обладают особой характеристикой входного синфазного диапазона напряжения и включает в себя землю, хотя работает от однополярного напряжения питания. Технические характеристики: производитель – Fairchild Semiconductor; тип – дифференциальный; число элементов – 2 напряжение питания – 2 V |
 а)
а) 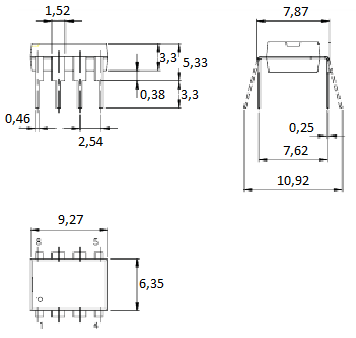 б)
б) а
а 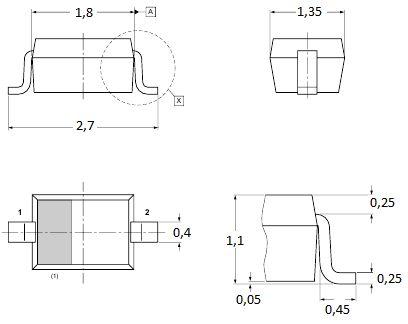 б
б а
а 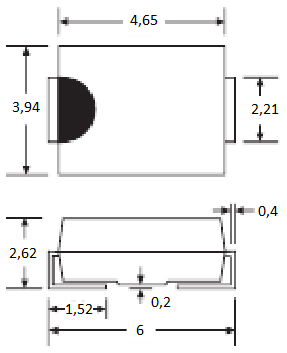 б
б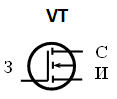 а
а 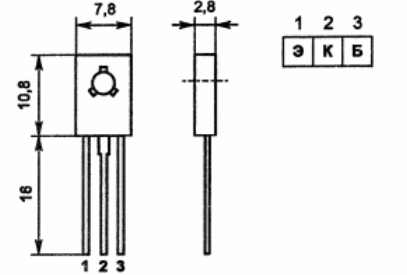 б
б а
а  б
б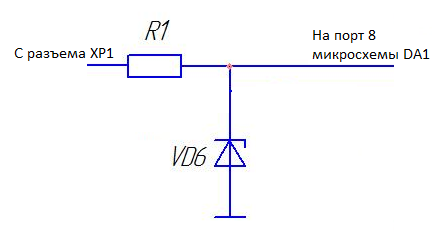

 (2.1)
(2.1) , (2.2)
, (2.2) (2.4)
(2.4) , (2.5)
, (2.5)