Механик. Автоматизация судов в вопросах и ответах (1). Автоматизация судов в вопросах и ответах предисловие
 Скачать 2.78 Mb. Скачать 2.78 Mb.
|

Как осуществляется параллельная работа генераторов?Регуляторы настроены при производственном контроле таким образом, что параллельная работа с сетью и прочими генераторами возможна, если напряжения холостого хода установлены на одинаковые значения. Мощности и нагрузочные токи должны распределяться пропорционально номинальным мощностям генераторов. В противном случае в системе регулирования мощности двигателя либо в цепи регулятора напряжения есть неисправность. Если статические характеристики генератора по напряжению вследствие поправок или по другим причинам изменились, это необходимо учесть. Для этого на холостом ходу, или при малой нагрузке устанавливается напряжение холостого хода машин на одни и те же значения. Проверяется распределение активной мощности, а затем при нормальной нагрузке устанавливаются одинаковые значения тока. Как устанавливается режим параллельной работы генераторов?Вначале устанавливается напряжение холостого хода и активной мощности. Для этого необходимо возбудить генераторы и оставить их работать на холостом ходу. Установить напряжение первого генератора (работающего) по измерительному прибору на щите на номинальное значение (400/500 В) рабочим выключателем потенциометра. Подключить первый генератор к шинам с малой нагрузкой. Напряжение второго генератора (подключаемого) установить на номинальное значение 400/500В рабочим выключателем потенциометра. Затем необходима синхронизация второго генератора с шинами (совпадение полярности). Если максимальная токовая защита второго генератора срабатывает, то в его цепи имеется неисправность. Необходимо поменять местами проводники, подходящие к зажимам выводов. Активные мощности генераторов установить по измерительным приборам на щите на одинаковые значения. Так как нагрузка сети мала, мощности имеют значение, близкое нулю. Если реактивные мощности генераторов больше и меньше или токи нагрузки разные, следует изменять напряжение второго генератора потенциометром до тех пор, пока реактивные мощности не будут равны нулю. Включить остальные генераторы по очереди параллельно первому генератору и выполнить операции, аналогичные тем, которые были исполнены при включении второго генератора. Следить за тем, чтобы активная и реактивная мощности распределялись поровну. Разрешается изменять напряжения генератора, включенного последним. Активные мощности с помощью системы регулирования дизеля устанавливаются до одних значении. Если номинальные мощности генераторов неодинаковы, то текущая нагрузка должна распределяться пропорционально им. Как выровнять нагрузки генераторов?Проверить потенциометры регуляторов обоих генераторов. Они должны находиться в среднем положении. Повысить нагрузку генераторов и проверить, что активные мощности распределяются правильно. При необходимости изменить работу регуляторов дизелей таким образом, чтобы активные мощности при номинальной нагрузке распределялись поровну. Если реактивные мощности отличаются или токи имеют разные значения, следует проверить проводку цепей токовой стабилизации. При условии, что показания измерительных приборов реактивной мощности или тока нагрузки отличаются мало, изменить уставку потенциометра в регуляторе второго генератора. Какие мероприятия необходимо выполнять при техническом обслуживании регулятора типа SMUI?При техническом обслуживании рекомендуется выполнять следующие операции: затягивать крепежные детали; удалять накопившуюся в шкафу пыль, но при этом пользоваться сжатым воздухом не разрешается; проверять действия реле и его контактов, изношенные реле рекомендуется заменять запасными. Какие меры применяют для защиты регулятора при коротком замыкании цепи намагничивания? Регулятор имеет автоматическую максимальную токовую защиту от короткого замыкания цепи намагничивания генератора. Только в исключительных случаях, например, если регулятор эксплуатируется при температуре окружающей среды, близкой к допустимым предельным значениям, или тиристорный мост продолжительное время работал с перегрузкой, один из тиристоров может выйти из строя вследствие короткого замыкания. Какие неисправности могут быть у регулятора напряжения типа SMUI и как их устранить?Неисправности, возникающие в регуляторе напряжения, приведены в табл.18. Кроме того, в ней указаны измерения и проверки, которые целесообразно проводить для устранения неисправности. Прежде чем приступать к проверке, следует проверить затяжку винтовых соединений и осмотреть контакты (нет ли следов их обгорания) и механические части. Таблица 18
Устройство электронных регуляторов частоты вращенияКакие применяются регуляторы частоты вращения?Для регулирования частоты вращения дизельных двигателей применяются главным образом центробежные регуляторы непрямого действия с гидравлическими сервомоторами, вырабатывающими усилие для перемещения рычажного механизма топливоподачи. В последнее время стали применять электронные регуляторы. Почему необходимы электронные регуляторы?Требования, предъявляемые к надежности регуляторов, их характеристикам и возможностям согласования с другими системами, неизменно растут по мере развития автоматизации. Поэтому начата разработка электронных регуляторов частоты вращения в связи с созданием систем дистанционного автоматизированного управления турбинами и малооборотными дизелями. Благодаря использованию достижении новейшей технологии стало возможным создание систем регулирования частоты вращения, содержащих только электрические и электронные компоненты. Такие системы должны удовлетворять особым требованиям в отношении их эксплуатационной надежности, характеристик и работоспособности в жестких условиях окружающей среды. Применяемые на судах дизели разнообразны по типам. Поэтому конструкция систем их регулирования должна отличаться высокой универсальностью: управлять различными исполнительными устройствами, вводы и выводы должны быть стандартизированы и легко подключаться к другим системам, например к системе дистанционного управления гребным винтом регулируемого шага или системе автоматизации дизель-генераторов. Какие недостатки имеют гидравлические регуляторы?Повышаются требования предъявляемые к качественным характеристикам систем регулирования частоты вращения и распределения нагрузки двигателей. Регулировать распределение нагрузки с помощью гидравлических и механических устройств трудно, так как они не обладают одинаковым статизмом. Гидравлические регуляторы имеют подвижные детали, которые изнашиваются. Частая смена их ведет к неизбежному износу и удорожанию обслуживания. Кроме того, мощность, необходимая для привода исполнительного механизма, отбирается непосредственно от двигателя, а это требует применения устройств специальной передачи и, следовательно, дополнительных затрат. Установка блока питания и гидравлического усилителя в случае ограниченной мощности исполнительного устройства также увеличивает стоимость регулятора. Каково устройство силовых приводов электронных регуляторов?Силовой привод регулятора ASAC 1850, выпускаемый фирмой АСЕА, имеет двигатель постоянного тока с низким моментом инерции, передачу и позиционный датчик. Время ускорения двигателя при частоте вращения 0-3000об/мин составляет 27мс. Крутящий момент на выходном валу редуктора около 1800 Нм, эффективный отбираемый момент примерно 700 Нм. Нормальный угловой интервал регулирования находится в пределах от 30 до 40°; поворот на угол в 30° происходит за 400 мс. Силовой привод можно проворачивать с помощью рукоятки, что используется в аварийной ситуации и при отладке системы. Регулятор типа EG фирмы «Вудворд» электрогидравлического типа содержит управляемый соленоид. Мощность отбирается от двигателя, как и в других системах подобной конструкции, и передается на выходной вал через гидравлический усилитель. Существует другой вариант этого регулятора типа EG-B, в котором исполнительный орган управляется не только с помощью соленоида, но и посредством обычного встроенного регулятора. В этом случае система работает с резервированием на случай отказа электрической части. Выпускаемые регуляторы EG имеют различные типоразмеры. Регулятор DYNA фирмы «Барбер Колман» содержит мощный соленоид, воздействующий на сердечник, имеющий пружину, под действием которой он возвращается в исходное положение. Управляющий сигнал, поступающий на вход электрического усилителя мощности системы, контролирует прохождение тока через обмотку соленоида и, следовательно, положение сердечника. Поступательное перемещение сердечника преобразуется во вращательное перемещение выходного вала исполнительного органа, оснащенного потенциометрическим позиционным датчиком. В регуляторах этого типа возможность резервирования или аварийного управления при возникновении неисправности в электрической системе не предусмотрена. Регуляторы DYNA выпускаются с различными типоразмерами. Что включает в себя электронная система регулирования скорости главных судовых дизелей?С 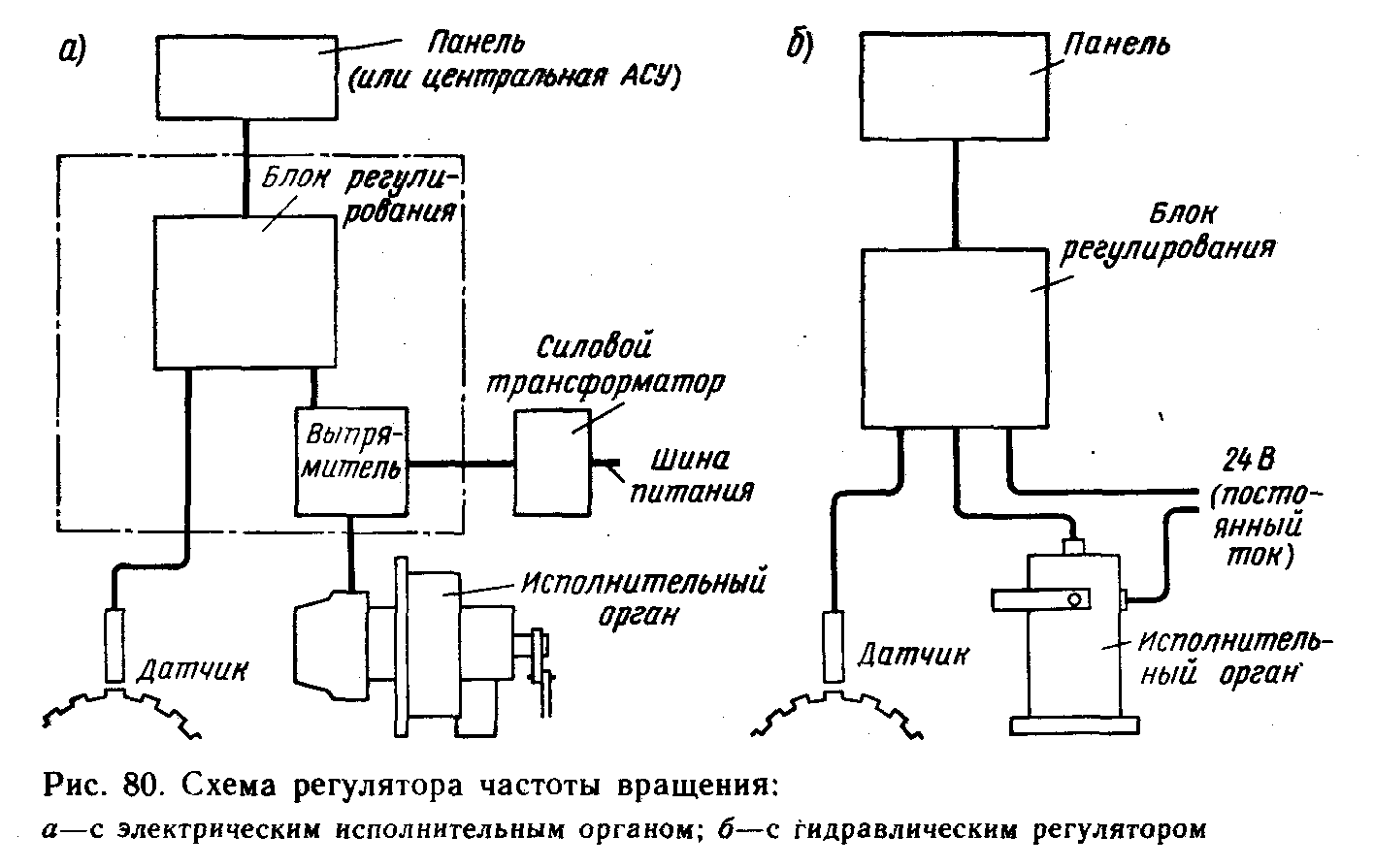 истема состоит из пульта управления, блока электроники, датчиков, исполнительного органа и блока питания (рис.80,а). истема состоит из пульта управления, блока электроники, датчиков, исполнительного органа и блока питания (рис.80,а).Пульт управления конструируется по техническому заданию заказчика. Вводы и выводы стандартизированы. К ним можно подключить реле, потенциометры, лампы, измерительные приборы и т.д. Кроме того, они позволяют производить обмен сигналами с центральной системой управления. Как устроены и работают исполнительные органы в электронных регуляторах?Применяемые исполнительные органы могут быть различных типов. Тем не менее, принцип их действия остается общим: блок электроники вырабатывает управляющий сигнал, поступающий на усилитель мощности, который заставляет исполнительный орган совершать механическое перемещение, связанное с входным сигналом определенной зависимостью. В системе применяется один из типов блока электроники: QHFR 110 для управления исполнительными устройствами регуляторов типа EG фирмы «Вудворд» или DYNA фирмы «Барбер Колман», имеющих встроенный усилитель мощности, либо QHFR 150, который содержит усилитель мощности и предназначен прежде всего для управления исполнительным устройством ASAC 1850 фирмы АСЕА. Функциональные электронные цепи блоков обоих типов одинаковы. Блок QHFR 110 заключен в герметизированный литой корпус, содержащий электронные компоненты и выводные панели. Конструкция блока позволяет монтировать его непосредственно на двигателе. Блок QHFR 150, помимо электронных компонентов, имеет тиристорный преобразователь с дросселями, предохранителями и простым имитирующим устройством. Блок QHFR 110 питается постоянным током напряжением 24В, в самом удобном варианте — от батареи. Питание блока QHFR 150 осуществляется от сети переменного тока напряжением 220В (380, 450В) через трансформатор. Электронные цепи в этом случае могут питаться от независимого источника постоянного тока напряжением 24В. Какие датчики частоты вращения используют в системе?В системе используют импульсный датчик частоты вращения, производящий отсчет по зубчатому колесу, установленному на валоповоротном механизме или маховике (рис.80,б). Как обрабатывается сигнал по частоте вращения?Значение частоты вращения вводится в систему в виде серии импульсов, преобразуемой в напряжение постоянного тока. Этот сигнал сравнивается с установкой, задаваемой извне, например, при помощи потенциометра, управляющего входным каскадом. Сигнал рассогласования поступает на вход каскада с низким коэффициентом усиления в интервале, близком нулю («мертвая зона»), а затем обрабатывается в схеме пропорционально-интегрально-дифференциального регулятора. Обработанный сигнал суммируется с уставкой и, пройдя схему, выполняющую некоторые функции ограничения, преобразуется в уставку топливоподачи, от которой зависит положение топливной рейки. Как обрабатывается сигнал по топливоподаче?Уставка топливоподачи и измеренное значение частоты вращения двигателя являются входными параметрами для пуска и ограничения крутящего момента. Входной величиной ограничения дымления является сигнал по давлению наддувочного воздуха. К | |||||||||||||||||||||||||||||||
 ак действует датчик частоты вращения?
ак действует датчик частоты вращения?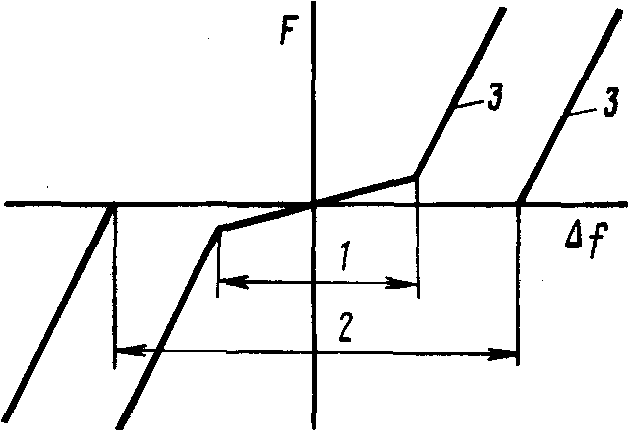 специальном режиме «медленного регулирования», который задается вводом особого сигнала, усиление в зоне (линия /) может быть близким нулю. Если сигнал рассогласования лежит в этой зоне, топливоподача изменяется весьма незначительно или остается неизменной. Таким образом поддерживается постоянство топливоподачи, в то время как частота вращения двигателя варьируется в зависимости от нагрузки.
специальном режиме «медленного регулирования», который задается вводом особого сигнала, усиление в зоне (линия /) может быть близким нулю. Если сигнал рассогласования лежит в этой зоне, топливоподача изменяется весьма незначительно или остается неизменной. Таким образом поддерживается постоянство топливоподачи, в то время как частота вращения двигателя варьируется в зависимости от нагрузки.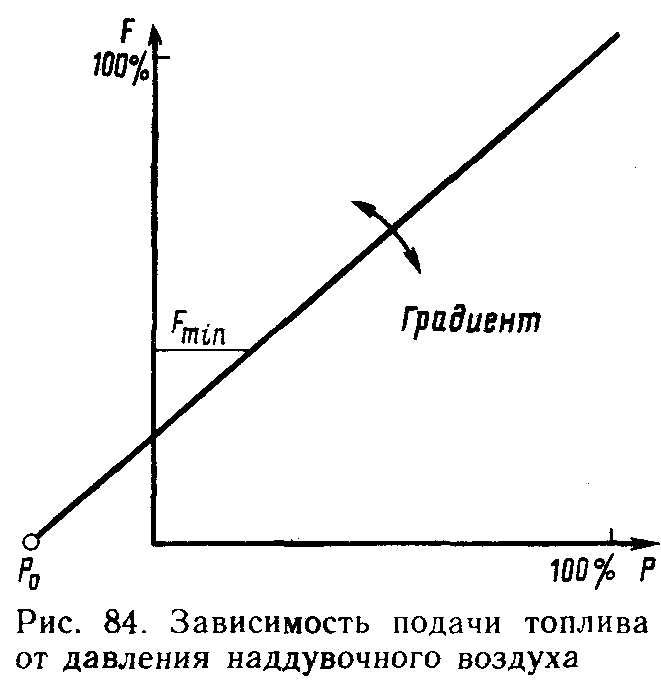 аксимальное значение топливоподачи связано с фактическим значением давления продувочного воздуха, которое может регулироваться в следующих точках:
аксимальное значение топливоподачи связано с фактическим значением давления продувочного воздуха, которое может регулироваться в следующих точках: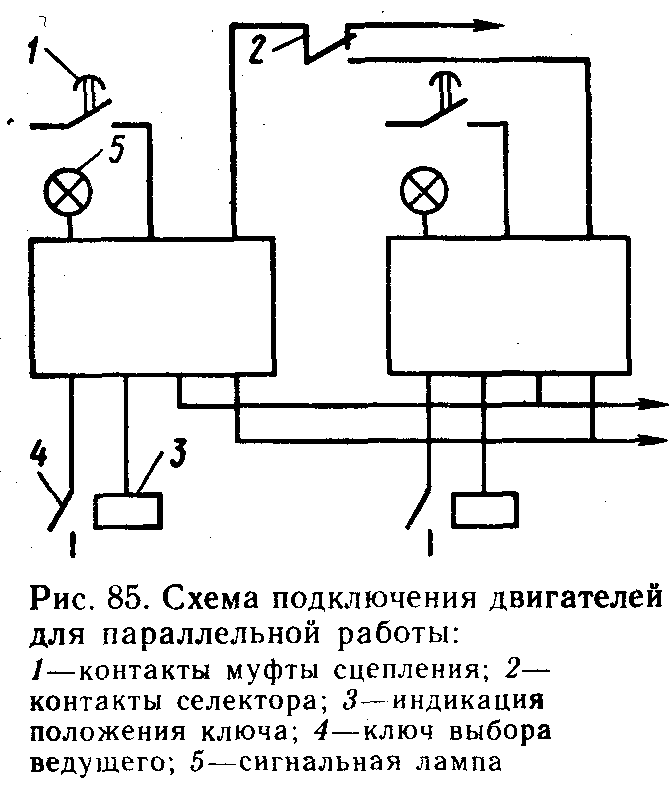 ыходной каскад представляет собой следящую сервосистему, получающую текущее значение топливоподачи от позиционного датчика (потенциометра), обычно устанавливаемого на исполнительном органе регулятора.
ыходной каскад представляет собой следящую сервосистему, получающую текущее значение топливоподачи от позиционного датчика (потенциометра), обычно устанавливаемого на исполнительном органе регулятора.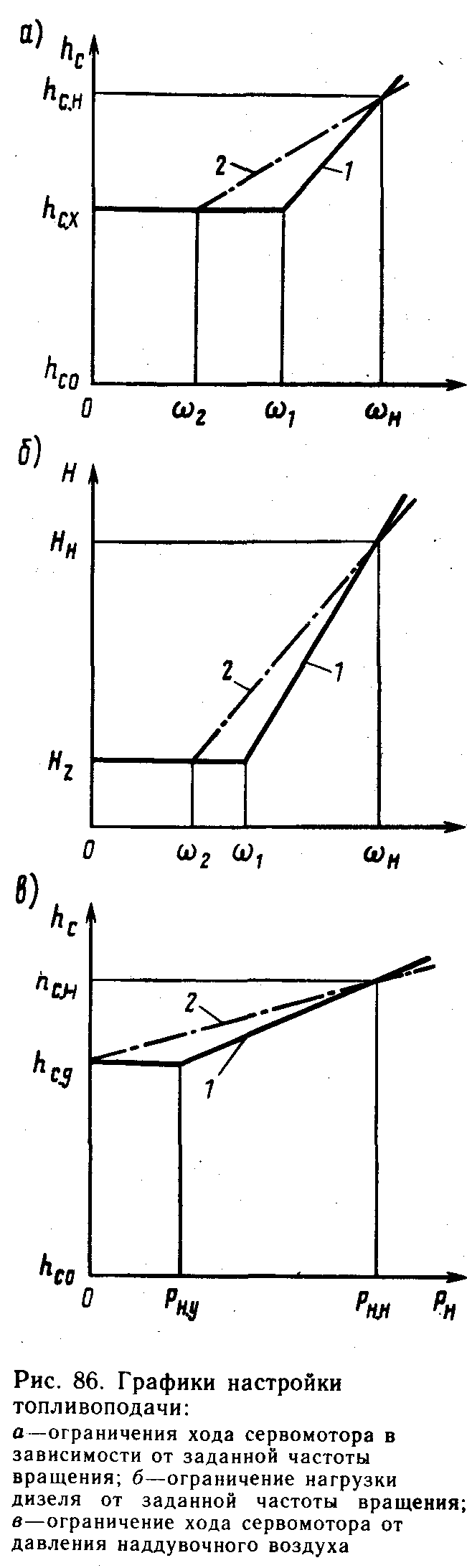 ри отсутствии ограничительной зависимости в эксплуатационной документации для настройки можно использовать зависимость, приведенную на рис.86,б (линия 1). В этой зависимости номинальная нагрузка дизеля Hz кВт и номинальная частота вращения дизеля ωн, об/мин;
ри отсутствии ограничительной зависимости в эксплуатационной документации для настройки можно использовать зависимость, приведенную на рис.86,б (линия 1). В этой зависимости номинальная нагрузка дизеля Hz кВт и номинальная частота вращения дизеля ωн, об/мин;