Отчет по плавательной практике на судне Cetus Leader. Отчет по практике. Cetus Leader
 Скачать 1.02 Mb. Скачать 1.02 Mb.
|

|
МІНІСТРЕСТВО ОСВІТИ І НАУКИ, МОЛОДІ ТА СПОРТУ УКРАЇНИ ОДЕСЬКА НАЦІОНАЛЬНА МОРСЬКА АКАДЕМІЯ ЗВІТ ЗПЛАВАЛЬНОЇ ПРАКТИКИ m/v «CetusLeader» Виконав: курсант 3-го курсу ФА, групи 2231 Козинский С.В. Перевірив: Керівник практики Вишневський Л.В. Одеса 2015 Зміст Вступ…………………………………………………………………3 Короткий опис вивчених систем автоматичного управління………..4 Докладний опис обраної системи управління………………………..11 Коротка інформація о системі…………………………………..11 Устрій, принцип роботи та призначення гідравлічного регулятора частоти обертання ГД Woodward PG 58…………………12 Висновок…………………………………………………………....17 Короткий опис вивчених систем автоматичного управління Під час рейсу я ознайомився та вивчив велику кількість САУ та їх підсистем, починаючи з першого дня знаходження на борту судна та на протязі всього рейсу, я переконувався, що САУ – це одні з найголовніших систем які присутні на судах. Ці системи контролюють безліч процесів, потребуючи найменшого втручання людини. Це можуть бути життєво необхідні параметри для головного двигуна, такі як: тиск та температура палива, температура охолоджуючої води, температура охолоджуючого масла, тиск та температура повітря наддування та безліч інших. Чи наприклад, це можуть бути процеси необхідні для комфортного проживання екіпажу судна,такі як: подача прісної води до надстройки (гідрофор), температура гарячої води для потреб екіпажу, кондиціювання повітря в приміщеннях для життя та інше. Системи автоматичного управління поділяються : За метою керування Системи автоматичного регулюванн. Система автоматичної стабілізації. Вихідне значення підтримується на постійному рівні (задане значення — константа). Відхилення виникають за рахунок збурень і при запуску системи.Система програмного регулювання. Задані значення змінюються за заздалегідь заданим програмою законом f(t). Поряд з похибками, що зустрічаються в системах автоматичного регулювання, тут також мають місце похибки від інерційності регулятора. Відомо три підвиди програмного керування: Керування за переміщенням. При керуванні за переміщенням сигнал керування подається від програмного пристрою, вихідні величини якого залежать від переміщення або положення рухомих частин керованої установки. Послідовне керування. В такій системі програма послідовного виконання дій зберігається в генераторі програми, який здійснює її покрокове виконання відповідно до стану керованої системи. Ця програма може або безперервно вводитися або ж зчитуватися з перфокарт, магнітних стрічок чи інших елементів зберігання інформації. Керування за часом. При керуванні за часом задаючи величини поступають від програмного пристрою, оснащеного генератором часу. Таким чином, характерною ознакою системи керування за часом є генерація керуючих дій, що задаються програмним пристроєм, у часі. Як генератор програми може використовуватися:кулачковий вал, копір, перфострічка, електронний контролер. Слідкуюча система керування. Вхідний вплив невідомий наперед. Він визначається тільки в процесі функціонування системи. Похибки дуже сильно залежать від виду функції f(t). Системи екстремального регулювання: Здатні підтримувати екстремальне значення деякого параметра (наприклад мінімальне або максимальне), що характеризує якість функціонування об'єкта. Критерієм якості, який зазвичай називають цільової функцією, показником екстремуму або екстремальною характеристикою, може бути безпосередньо вимірювана фізична величина (наприклад, температура, струм, напруга, вологість, тиск) або ККД, продуктивність та ін. Адаптивні системи автоматичного управління Служать для забезпечення бажаної якості процесу при широкому діапазоні характеристик зміни об'єктів керування і збурень. За видом руху інформації в керуючому пристрої Замкнуті САУ. У замкнутих системах автоматичного регулювання керуючий вплив формується в безпосередній залежності від керованої величини. Зв'язок входу системи з його виходом називається зворотним зв'язком. Сигнал зворотного зв'язку віднімається від задаючого впливу. Такий зворотний зв'язок називається від'ємним. Розімкнені САУ. Сутність принципу розімкнутого управління полягає в жорстко заданій програмі керування. Тобто керування здійснюється «наосліп», без контролю результату, ґрунтуючись лише на закладеній в САУ моделі керованого об'єкта. У свою чергу розрізняють: Розімкнені за задаючим впливом; Розімкнені за збурюючим впливом. За формою представлення інформації Аналогове керування. При цьому виді керування обробляються аналогові сигнали. Їх обробка здійснюється безперервно функціональними елементами системи. Цифрове (дискретне) керування. При цьому виді керування обробляються цифрові сигнали. Інформація представляється у цифровій формі. Функціональними елементами є лічильники, регістри, елементи пам'яті, лічильні пристрої і т.д. Двійкове керування. При цьому виді керування обробляються двійкові сигнали, які не є складовою частиною інформації, представленою у цифровій формі. За видом обробки сигналів Синхронне керування. Керування, при якому обробка сигналів синхронізована з тактовим імпульсом. Асинхронне керування. Керування, здійснюване без тактових імпульсів, при якому зміна вихідних сигналів відбувається тільки за рахунок перемикання вхідних сигналів. Логічне керування. Керування, при якому поле значень вхідних сигналів формує певне поле значень вихідних сигналів на основі зв'язків, виражених в термінах Булевої алгебри. Послідовне керування. Керування з примусовим покроковим процесом, при якому перемикання програми від кроку до кроку залежить від певних умов, виконуваних у ході процесу. Алгоритм програми такого керування може мати переходи, петлі, розгалуження і т.д. Послідовне керування поділяється на дві підгрупи: Послідовне керування за часом та керування, при якому умови перемикання залежать тільки від часу. Для здійснення цього виду керування використовуються реле часу, лічильники часу або задаючи вали з постійною швидкістю обертання. Послідовне керування за станом процесу. Послідовне керування, при якому умова подальшого перемикання залежить тільки від сигналів, що поступають від керованої системи. Короткі приклади вивчених систем: Гідравлічний П-регулятор тиску пари с жорстким зворотним зв’язком 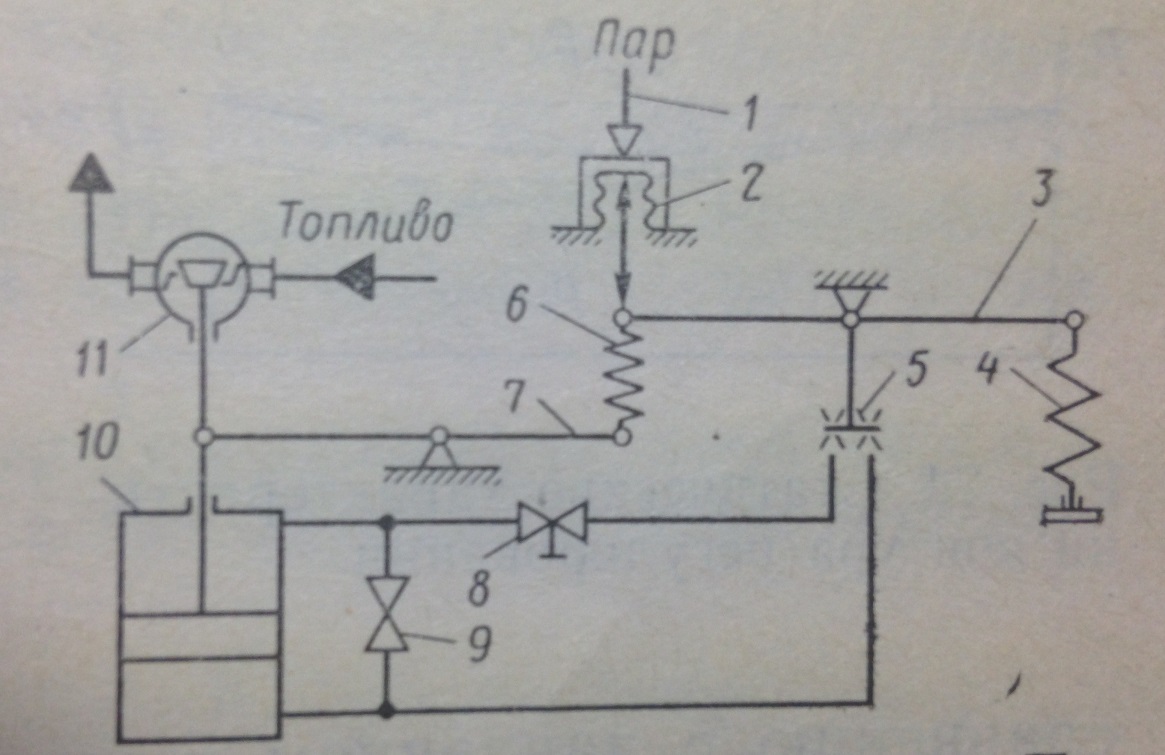 Рис. 2 . Принципова схема 1-імпульсного П-регулятора тиску пари Регулятор вимірює тиск у паропроводі за допомогою сильфона 2, к якому підведений імпульсний трубопровід 1. В сталому режимі зусилля від сильфону врівноважується натягом задающої пружини 4 та пружини зворотнього зв’язку 6, заслінка водяного підсилюючого реле 5 знаходиться в середньому положенні, і поршень виконавчого механізму 10 нерухомий. При відхиленні тиску пари від встановленого, рівновага порушується, нове зусилля сильфона 2 на важіль 3 приводить до відхилення заслінки регулюючого реле 5 і подаче води в одну з порожнин виконавчого механізму 10, в результаті його поршень переміщається і змінює ступінь відкриття регулюючого подачу палива клапана 11, надаючи регулюючий вплив на тиск через важіль 7 і пружину зворотного зв’язку 6 надає вимикаюче зусилля на підсилювальне реле 5. Дросельний клапан 8 призначений для змінення часу виконавчого механізму 10, а клапан 9 для з’єднання його порожнин при переході з автоматичного регулювання на ручне. 2-імпульсний регулятор рівня води в котлі 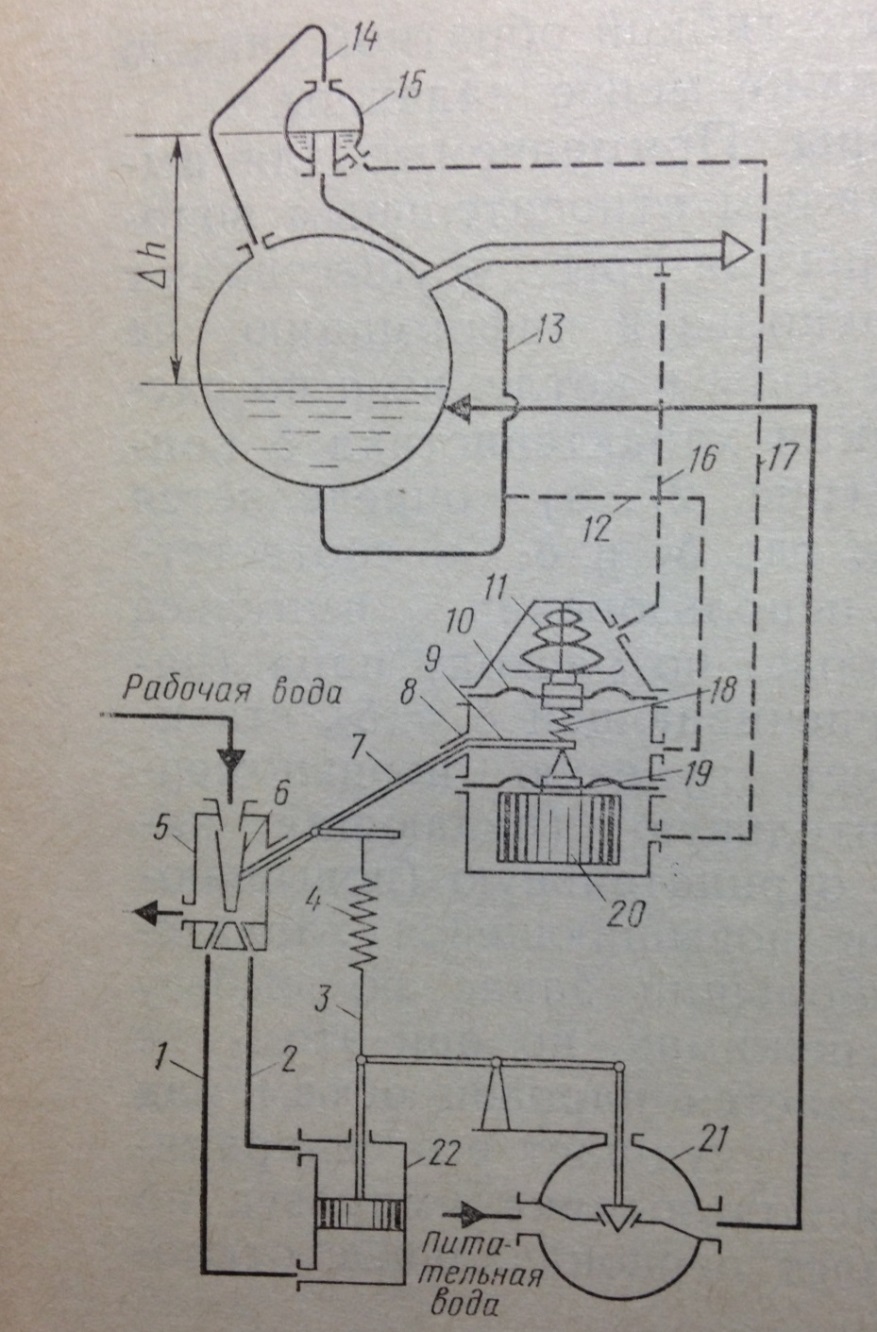 Рис.3. Принципова схема 2-імпульсного регулятора рівня води в котлі Двох-імпульсний регулятор рівня складається з вимірювального органа 8, підсилювального гідравлічного реле 5, виконавчого механізму 22, регулюючого живильного клапана 21, зворотнього зв’язку 3, конденсаційного сосуда 15, з’єднаного трубами 13 і 14 з водяним та паровим об’ємами колектора котла ( рівень підтримується постійним за рахунок зливу конденсата в нижню частину колектора ) . В корпусі вимірювального органа закріпленні 2 мембрани ( рівня 19 і рас ходу 10 ) , виконання з прорезиненої тканини яка розділяє йог на 3 порожнини. Порожнини вимірювального органа з’єднанні: верхня з паропроводом свіжого пару за допомогою імпульсної трубки 16; середня з пароводяним колектором за допомогою трубки 12; нижня з конденсаційним сосудом 15 трубкою 17. Отже, на мебрану 19 рівня діє спрямована вверх сила, обумовлена площею мембрани і тиском стовпа води ∆h між постійним рівнем у сосуді та змінним рівнем у пароводяному колекторі: цим досягається вимірювання води у котлі. Зусилля мембрани врівноважується підвішеним до неї вантажем 20, імпульсною пружиною 18 і пружиною 4 зворотного зв’язку. Мембрана 10 витрати, навантажена комплектом пластинчатих пружин 11, вимірює перепад тиску між пароводяним колектором і паропроводом свіжої пари, який практично пропорційний витраті пари. Зі збільшенням навантаження котла тиск у верхній порожнині вимірюючого органа зменшується, перепад тисків на мембрані витрати збільшується, що призводить до її переміщення у гору і часткового навантаження імпульсної пружини. Вплив по рівню та витраті пари підсумовується на важелі 9 і через валик 7 передається до струйній трубці 6. При відхиленні трубки виконавчого механізму, зв’язаний з реле силовими трубками 1 і 2, збільшує ступінь відкриття живильного алкану 21. Зворотне переміщення струйної трубки виконується через жорсткий зворотній зв’язок 3. Зменшення витрати пару приведе до стиснення імпульсної пружини і зворотному впливу регулятора. 2. Докладний опис обраної системи управління Для докладного опису я обрав систему автоматичного регулювання частоти обертання судового головного дизельного двигуна. . Коротка інформація о системі. Фірма виробник: WOODWARD  Рис. 4. Гідравлічний регулятор частоти обертання валу ГД фірми Woodward типу PG-58 2.2 Устрій, принцип роботи та призначення гідравлічного регулятора частоти обертання ГД Woodward PG-58. Згідно з вимогами морського Регістру судноплавства , кожен головний двигун повинен мати регулятор , відрегульований таким чином, щоб частота обертання двигуна не могла перевищити номінальну частоту обертання більш ніж на 15%. Управління головним двигуном при змінах зовнішнього навантаження гребного гвинта здійснюється за допомогою всережимного автоматичного відцентрового гідравлічного регулятора непрямої дії типу PG-58 (рис. 6.) З диференціальним сервопоршнем. Регулятор розвиває перестановочне зусилля 58 футо-фунтів . Він призначений для підтримки заданого швидкісного режиму та забезпечення ДАУ двигуном судна. У процесі стабілізації швидкісного режиму регулятор може обмежувати подачу палива у двигун при збільшенні навантаження залежно від заданої частоти обертання і тиску повітря наддуву. 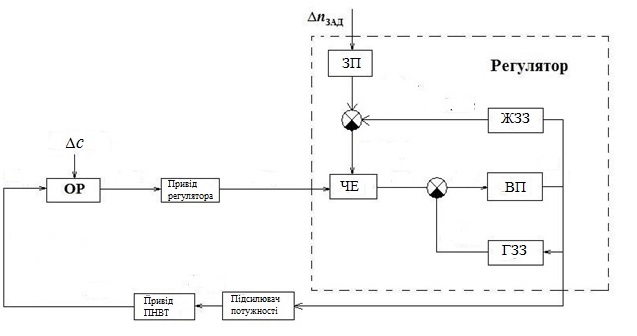 Рис. 5. Функціональна схема контуру автоматичного регулювання частоти обертання валу головного двигуна 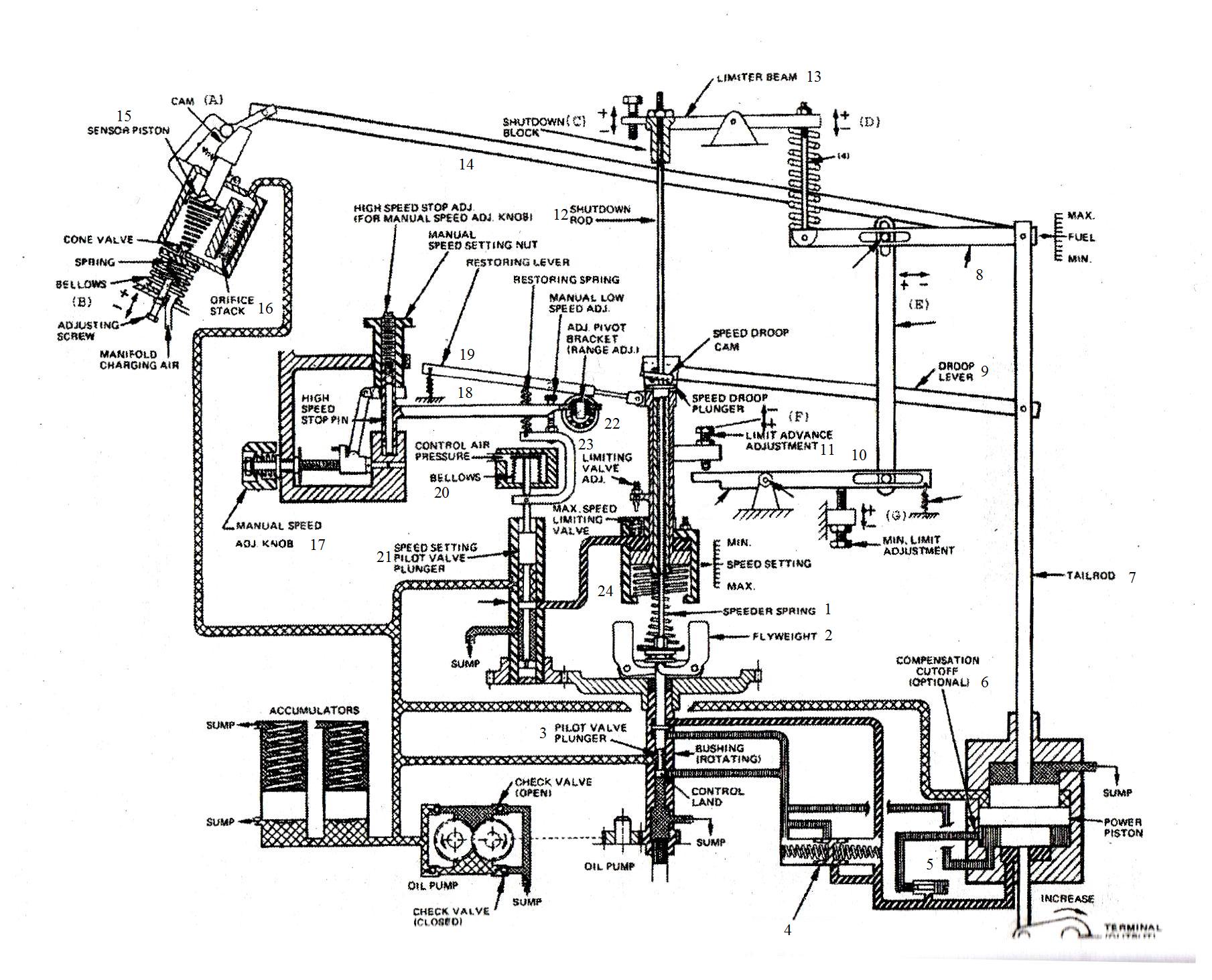 Принцип дії регулятора частоти обертання валу ГД фірми Woodward типу PG – 58. Принцип дії регулятора частоти обертання валу ГД фірми Woodward типу PG – 58.Рис .6 . Принципова схема регулятора фірми Woodward типу PG -58 Основними елементами регулятора є: 1 пружина завдання , 2 - відцентрові вантажі , 3 - керуючий золотник , 4 поршень ізодрома , 5 голка ізодрома , 6 - поршень сервомотора , 7 - шток поршня , 8, 10 , 13, 14, 19 - важелі , 9, 11 , - тяга і болт обмежувача паливоподачі по заданих оборотах , 12 - шток керуючого золотника , 15, 16 - сервомотор і сильфон обмежувача паливоподачі по тиску повітря надування, 17 , 18, 22 - рукоятка ручного завдання частоти , кронштейн і ролик , 20, 21, 23, 24 - сильфон керуючого повітря, золотник, сережка , поршень завдання частоти . Принцип дії та налаштування регулятора полягає в наступному. При зменшення навантаження двигуна його число обертів буде збільшуватися і відцентрові вантажі 2 будуть розходитися , керуючий золотник 3 під дією відцентрових вантажів підніметься вгору. При цьому нижній регулючий поясок золотника повідомить ліву порожнину поршня ізодрома 4 зі зливом і поршень 6 сервомотора під дією масла, що надходиться в його верхній порожнині від акумулятора, почне рухатися вниз, витісняючи масло в праву частину ізодрома 4 і переміщуючи його вліво, а паливну рейку - на зменшення палива у двигун. Одночасно з цим в результаті виникнення перепаду тисків на верхньому компенсуючому паску золотника 3 останній опуститься вниз у вихідне положення і поршень 6 сервомотора зупиниться. Після цього поршень 4 ізодрома під дією своєї лівої стислої пружини буде рухатися вправо, витісняючи масло через дросельний клапан 5 з правої порожнини ізодрома в ліву. Коли поршень 4 повернеться в своє початкове середнє положення, перепад тисків на компенсуючому пояску золотника 3 стане рівним нулю і дія ізодромною зворотного зв'язку припинитися. Час ізодрома визначається гідравлічним опором, створюваним дросельним клапаном 5. Воно повинно відповідати часу, протягом якого в результаті зміни регулятором паливоподачі відбудеться відновлення заданої частоти обертання валу двигуна. При цьому перехідні процеси щодо зміни числа обертів будуть плавними і короткими за часом. При збільшенні навантаження на двигун відбувається зменшення частоти обертання. Відцентрові вантажі 2 сходяться , муфта і керуючий золотник 3 під дією пружини 1 опускаються вниз. Поле золотника відкриває вікно у втулці для проходу масла постійного тиску по каналу в нижню порожнину поршня 6 , який переміщується вгору на збільшення подачі палива. Одночасно з цим в результаті виникнення перепаду тисків на верхньому компенсуючому пояску золотника 3 останній підніметься вгору у вихідне положення і поршень сервомотора зупиниться. Після цього поршень 4 ізодрома під дією своєї правої стислої пружини буде рухатися вліво, витісняючи масло через дросельний клапан 5 з лівої порожнини поршня ізодрома в праву. Коли поршень ізодрома 4 повернеться в своє початкове положення, перепад тисків на компенсуючому паску золотника 3 стане рівним нулю і дія ізодромною зворотного зв'язку припиниться. Дистанційне завдання швидкісного режиму двигуна, здійснюється шляхом зміни тиску керуючого повітря в порожнині над сильфоном 20. При завданні підвищеної частоти обертання двигуна тиск керуючого повітря збільшується , сильфон стискується і опускає вниз сережку 23 із золотником 21. Поле золотника 21 відкриває вікно у втулці для проходу масла постійного тиску у верхню порожнину сервомотора завдання частоти обертання. Поршень 24 переміщується вниз , стискаючи пружину завдання 1. Внаслідок цього зусилля пружини 1 стає більше відцентрової сили вантажів 2, і муфта разом з керуючим золотником 3 опускається вниз. При русі поршня 24 вниз його шток впливає на важіль 19, який, повертаючись навколо опори 20, збільшує зусилля пружини, яка зв'язує його з сережкою 23. Серьга повертає золотник 21 в середнє положення, канал підведення масла у верхню порожнину сервомотора перекривається, і рух поршня 24 вниз припиняється. У результаті переміщення керуючого золотника 3 вниз відбувається переміщення поршня 6 вгору на збільшення подачі палива у двигун. Під дією відцентрових вантажів і зворотного зв'язку керуючий золотник 3 повертається у вихідне положення , і поршень 6 зупиняється. Збільшення паливоподачі призводить до підвищення частоти обертання двигуна відповідно з новим завданням . При зменшенні завдання частоти обертання регулятор зменшить топливоподачу і переведе регулятор на знижений швидкісний режим аналогічним чином . За допомогою болта 27 обмежують завдання мінімальній швидкості регулятора. Положення його нижній частині має бути на 1,2 мм вище положення верхнього торця поршня 24 при завданні мінімальної частоти обертання, при якій забезпечується стійка робота двигуна. За допомогою болта 28 , що впливає на кульковий клапан 29 , встановлюється максимально можливий рівень завдання частоти обертання. При відсутності пневмосигнала дистанційного управління здійснюють перехід на ручну зміну завдання швидкісного режиму за допомогою кнопки 17 , обертання якої за годинниковою стрілкою приводить до збільшення заданого значення частоти обертання. Висновок Під час рейсу я ознайомився та вивчив велику кількість САУ та їх підсистем, починаючи з першого дня знаходження на борту судна та протязі всього рейсу, я переконався, що САУ- це одні з найголовніших систем які присутні на судах. Ці системи контролюють безліч процесів, потребуючи найменшого втручання людини. Це можуть бути життєво необхідні параметри для головного двигуна, такі як: тиск та температура палива, температура охолоджуючої води, температура охолоджуючого масла, тиск та температура повітря наддування та безліч інших. Чи наприклад, це можуть бути процеси необхідні для комфортного проживання екіпажу судна, такі як: подача прісної води до настройки, температура гарячої води для екіпажу, кондиціювання повітря в приміщеннях для життя та інше. Саме тому коли ти починаєш більш детально цікавитись САУ, ти дізнаєшся, що вони використовуються майже всюди. |