курсовая термех. Курсовая Сытько. Департамент по авиации министерство транспорта и коммуникаций республики беларусь
 Скачать 304.25 Kb. Скачать 304.25 Kb.
|

|
ДЕПАРТАМЕНТ ПО АВИАЦИИ МИНИСТЕРСТВО ТРАНСПОРТА И КОММУНИКАЦИЙ РЕСПУБЛИКИ БЕЛАРУСЬ Белорусская государственная академия авиации Кафедра естественнонаучных дисциплин Группа БАК 120 ПОЯСНИТЕЛЬНАЯ ЗАПИСКА К курсовой работе по теоретической механике Исполнитель В.А. Костюченко Руководитель А.Н. Шинкевич Минск 2021 СОДЕРЖАНИЕ РАСЧЁТНО-ПОЯСНИТЕЛЬНОЙ ЗАПИСКИ Задание (кинематическая схема и исходные данные) ...……………………...3 Цель курсовой работы работы……………………………………….................6 Построение планов положения механизма …………………………………...7 Построение планов скоростей механизма……………………………………..8 Определение сил, действующих в механизме………………………………....8 Расчет построение механической характеристики пружин возврата ……...9 Построение и определение значений сил сопротивления в контактах……..10 Определение и построение статической характеристики сил на якоре с использованием метода Жуковского …..……………………………………..11 Определение приведенной массы механизма…………..………………..…...12 Определение изменения кинетической энергии механизм…………….........15 Определение времени срабатывания механизма…………………………..…16 Графическая часть Задание  МЕХАНИЗМ ПРИВОДА ВЫСОКОВОЛЬТНОГО ВЫКЛЮЧАТЕЛЯ МЕХАНИЗМ ПРИВОДА ВЫСОКОВОЛЬТНОГО ВЫКЛЮЧАТЕЛЯ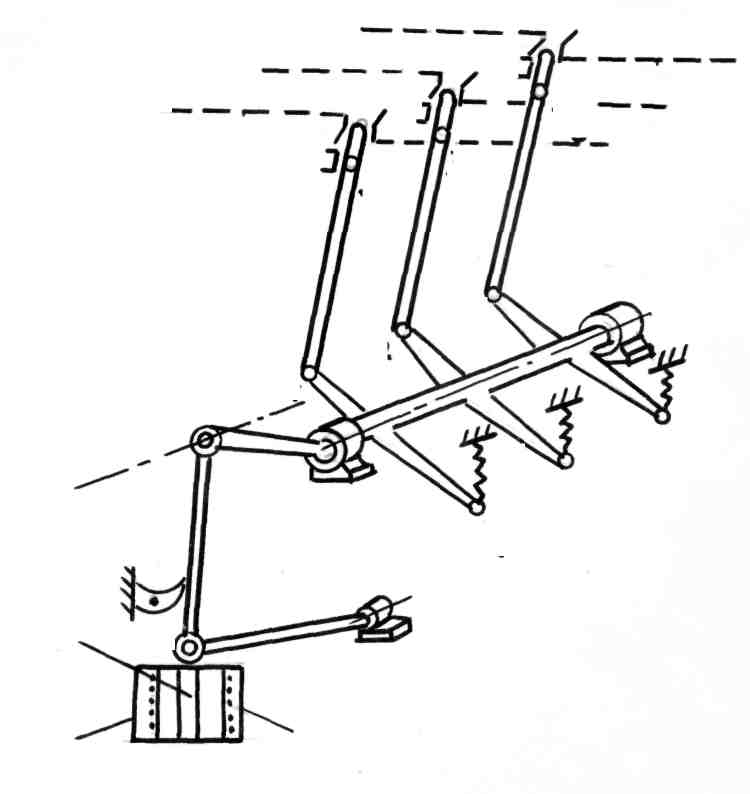 Рис.1 Механизм привода высоковольтного выключателя: 1 – обмотка соленоида; 2 – якорь; 3 – вал рычагов; 4 – защелка; 5 – включающие стержни; 6 – стержень якоря; 7 – отключающие пружины. 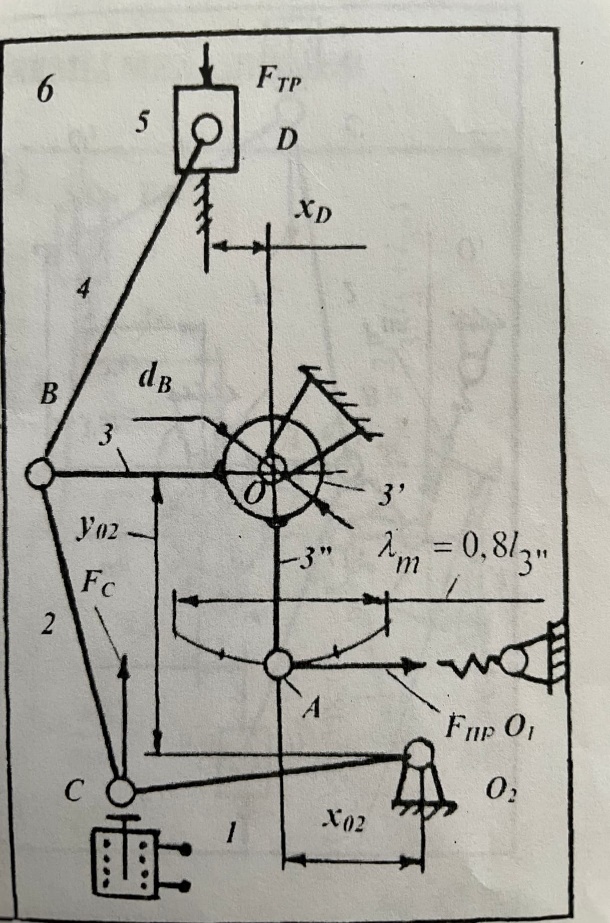 КИНЕМАТИЧЕСКАЯ СХЕМА МЕХАНИЗМА Таблица исходных данных
Цель курсовой работы: Изучить работу механизма привода высоковольтного выключателя в режимах включения и выключения; Приобрести навыки необходимых расчетов механических характеристик с использованием метода Жуковского, а также навыки выполнения кинематических схем механизмов; Определить время отключения механизма. Построение планов положения механизма Построим кинематическую схему механизма в пяти положениях по размерам из таблицы, начиная с заданного на исходной схеме (ему присваивается № 3) в масштабе 1:1. Крайние положения № 1 и 5 отстоят от № 3 на  , положения № 2 и 4 – на , положения № 2 и 4 – на  . Масштабный коэффициент длины . Масштабный коэффициент длины  =0,001 м/мм. Построение схемы проводим методом засечек и начинается с определения местоположения неподвижных шарниров О и О2. =0,001 м/мм. Построение схемы проводим методом засечек и начинается с определения местоположения неподвижных шарниров О и О2.В центре листа формата А3 отметим положение неподвижного центра О, от него по координатам х02 и у02строим положение второго неподвижного центра О2. Траекторию поступательного движения ползуна 5 (точка D) определяем по абсциссе хD. Положения точек АиВ строим по кинематической схеме механизма в соответствии с численными данными таблицы. Все расстояния откладываем от центра О. Методом засечек определяем положения точек CиD. Циркулем наносим диаметр вала dВ звена 3’, отмечаем неподвижность его соединения со звеньями 3 и 3”. Построим схему механизма в положениях № 1, 2, 4 и 5, исходя из приведенных выше соотношений величины  . На плане положений указываем точку О1 и пружину, так как движение механизма происходит в сторону растягивания пружины. . На плане положений указываем точку О1 и пружину, так как движение механизма происходит в сторону растягивания пружины.Построение планов скоростей механизма Строим 5 планов скоростей механизма в масштабе кривошипа ведущей точки пружины (pv*a=OA). Для этого определяем виды движений всех звеньев механизма, записываем векторные уравнения и решаем их графическим методом. Скорость точки А построим, направляя из точки О, перпендикулярно ОА прямую на расстояние l3,,. Скорость точки В построим направляя из точки О перпендикулярно ОВ прямую на расстояние l3. Скорость точки С определяем скоростью точки В лежащей на перпендикуляре СВ, и перпендикуляром к СО2 проходящим через точку Pv для скорости точки С:   Скорость точки D определяем скоростью точки В лежащей на перпендикуляре к DB, и параллельную к DD0 проходящей через точку Pv. для скорости точки D:  = = + +  Определение сил действующих в механизме Наносим на кинематическую схему действующие силы (силу действия пружин возврата FПР, силу трения в контактах FТР и усилие на штоке FC). Жёсткость пружин С (Н/мм). Жёсткость пружин С (Н/мм) определяется по числу витков пружин n:  ; ; ; ; . .Расчет и построение механической характеристики пружин возврата Определяем силу FПР (Н) с учётом начальной деформации в и с учётом запаздывания средней пружины на      Построение и определение значений сил сопротивления в контактах Построим механическую характеристику  сил трения в контактах, считая ее линейной от нуля в точке 1 до значения 1/3 FПР5 в точке 5. Определим и запишем значения силы трения FТР(Н) с учетом масштабного коэффициента сил сил трения в контактах, считая ее линейной от нуля в точке 1 до значения 1/3 FПР5 в точке 5. Определим и запишем значения силы трения FТР(Н) с учетом масштабного коэффициента сил  = =  9,1 (Н/мм ). 9,1 (Н/мм ).Масштабный коэффициент длины  (м/мм) по оси абсцисс определим по формуле: (м/мм) по оси абсцисс определим по формуле: Расстояние 1 – 5 принимаем 100 мм.      Определение и построение статической характеристики сил на якоре с использованием метода Жуковского По методу «жесткого» рычага Жуковского поворачиваем все силы на 90° по часовой стрелке, наносим эти силы на планы скоростей и определяем плечи сил hFПР, hFТРи hFС. По правилу Жуковского:   Из уравнения равновесия находимFC(Н):           Строим статическую характеристику сил на якоре механизма Строим статическую характеристику сил на якоре механизма  Определение приведенной массы механизма Для определения приведенной массы необходимо найти массы стержней, моменты инерции звеньев и отношение линейных скоростей. Масса m(кг)стержней определяем по формуле:  . .     Масса вала:  Масса ползуна:  Момент инерции I(кг∙м2) звеньев определяем по формулам в зависимости от того, в каком движении находится звено:   Момент инерции вала IВ (кг∙м2) определяем по формуле:        Отношениями соответствующих отрезков плана скоростей можно представить отношения линейных скоростей; угловые скорости можно определить отношением линейной скорости точки к соответствующему радиусу.          Где  ; ;µl=10-3 м/мм. Определяем для положения №3 приведенную в точке А массу mПР (кг), по общей формуле:  Формулы расписываем применительно к конкретному механизму с учетом того, что звенья, находящиеся во вращательном движении, уравновешиваются относительно центров вращения, и их массы в уравнениях приведения будут равны нулю.       Определение изменения кинетической энергии механизма Определяем изменение кинетической энергии механизма в процессе отключения по разности площадей механических характеристик отключающих пружин и сопротивлений в контактах. Для этого переносим график на график  и определяем площадь образовавшегося участка SИЗБ (мм2). и определяем площадь образовавшегося участка SИЗБ (мм2).S1=  *80=1160 (мм2) *80=1160 (мм2)S2=  *80=2760 (мм2) *80=2760 (мм2)SИЗБ =S1+S2=3920(мм2)   Определение времени срабатывания механизма Время срабатывания определяем по рассчитанной массе:  Литература 1. Бутенин Н.В. Курс теоретической механики/ Н.В. Бутенин, Я.Л. Лунц, Д.Р. Меркин. - СПб.: Лань, 1998. – 736 с. 2. Никитин Н.Н. Курс теоретической механики/ Н.Н. Никитин. - М.: Высшая школа, 1990. – 606 с. 3. Тарг С.М. Краткий курс теоретической механики/ С.М. Тарг. – М.: Высшая школа, 1995. – 416 с. 4. Артоболевский И.И. Теория механизмов и машин/ И.И. Артоболевский. - М.: Наука, 1975. – 640 с. 5. Шинкевич А.Н. Теоретическая механика. Методические указания к курсовой работе для спец. Т 04 07 00 «Техническая эксплуатация летательных аппаратов и двигателей»/ А.Н. Шинкевич. - Минск. МГВЛТК, 2000. – 22 с. 6. Подскребко М.Д. Задания по расчётно-графическим работам курса «Прикладная механика»/ М.Д. Подскребко, С.С. Томило, А.Н. Шинкевич. – Минск. БАТУ,1995. – 75 с. | |||||||||||||||||||||||||||||||||||||||||||||