Етерство образования и науки российской федерации
 Скачать 1.38 Mb. Скачать 1.38 Mb.
|

ДвигательU '—\Выпрямитель Инверторная часть Сетевое напряжение R Звено постоянного тока Рисунок 5 -Типовая схема преобразователя частоты Из изображения следует, что основными элементами силовой схемы являются выпрямитель и инвертор. Выпрямитель представляет собой механизм, который преобразует входной переменный ток, в ток постоянного направления. Инвертор выполняет функцию обратную выпрямителю. Являет собой генератором периодического напряжения по форме приближенного к синусоиде. Преобразует переменный ток в постоянный. Драйвера инвертора управляются посредством создания шестиканальной широтно-импульсной модуляции (ШИМ). Основными элементами пульта управления и контроллера являются центральные процессоры (ЦП). Данная конструкция обусловлена большим объемом сложных вычислений в режиме реального времени для реализации сложнейших алгоритмов управления. Они призваны исполнять код программ, работу с устройствами вывода, памятью, индикаторами, модулями связи, модулями управления, датчиками. Современные преобразователи стояться на основе двух или нескольких процессоров. Первый процессор ЦП1 выполняет все функции преобразователя, задает частоты и исполняет программу блок управления преобразователем. Второй процессор ЦП2 обеспечивает работу пульта управления, индикаторов и связи. Наличие двух процессоров в системе позволяет снизить нагрузку в работе на отдельно взятый процессор. Увеличивается быстродействие, снижается требование к объему памяти. Работу современных преобразователей частоты трудно представить без, лежащих в основе микропроцессоров. В частности, данное устройство наиболее широко применяется в составе электродвигателей подруливающих устройств. Подруливающие устройства в свою очередь все более широко используются, как и в надводных суднах, так и в подводных аппаратах. Перспектива развития, в частности необитаемых подводных аппаратов, для Российской Федерации крайне привлекательна и актуальна. Это откроет возможность более широко исследовать воды Арктики, Черного моря и Тихого Океана. В следствии развития данного рынка, имеет колоссальную ценность разработка новейшего автоматизированного блока управления, в том числе для подруливающего устройства. На сегодняшний день рынок переполнен микроконтроллерами различных исполнений и архитектур. Создание блока управления позволить более точно настраивать конфигурации работы с преобразователем. Участие человека в операция сложных маневров на низких скоростях может свестись к минимуму. Заметно в лучшую сторону может измениться и управление подводными аппаратами, с помощью подруливающего устройства улучшится плавность хода, что в свою очередь уменьшит вероятность возникновения потери контроля аппаратом. Также написание успешного блока управления может дать толчок к развитию не только строения современных отечественных подруливающих устройств и электродвигателей, но и одновременно повысит уровень технической подкованности персонала в написании программ автоматизации управления. Возможно, развитие подобных технологий приведет к промышленному производству отечественных микроконтроллеров. Таким образом, именно поэтому, в качестве основы были выбраны именно отечественные разработки, соответствующие всем современным мировым стандартам качества, но при этом имеющие более низкую цену в сравнении с иностранными аналогами. В данной главе было осуществлено ознакомление с общими принципами работы с автоматизацией управления подводного аппарата. Проведен анализ и рассмотрены общие принципы работы подруливающего устройства, асинхронного двигателя и преобразователя частоты, исследована специфика работы с устройствами, а также рассмотрены условия применения в современных реалиях. Во 2 главе, в качестве составного устройства привода подруливающего устройства будет рассмотрен асинхронный трехтактный электродвигатель ДВА-700-4ОМ4, Российской разработки. Будут изучены его характеристики, чертежи, а также принцип и специфика работы с устройством в совокупности с преобразователем частоты АТ24 «мультидрайв» в составе привода подруливающего устройства. Составляющие электропривода подруливающего устройства 2.1 Схема управления подруливающими устройствами Управление подруливающим устройством осуществляется посредством подачи сигнала с преобразователя частоты на асинхронный электродвигатель. Фазовые выходы преобразователя подключают к контактам электродвигателя. Обмотки электродвигателя подсоединяются по принципу «треугольник» или «звезда». Тип выбирается исходя из напряжения, который вырабатывает источник. Далее преобразователь подключается к пульту управления. Пульт управления выполняет все рабочие функции управления заданные в микроконтроллер преобразователя. Эми-фильтр устанавливается с целью предотвращения проблемы электромагнитной совместимости устройств. Снижению нагрузки на сеть, кабель и предохранители будет способствовать установленный сетевой дроссель. Использование сетевого дросселя на входе преобразователя позволит снизить пиковые входные токи на преобразователь и повысит коэффицент мощности. Соединение преобразователя с двигателем осуществляется посредством кабелей, сечение которых соответствует сечению кабелей указанных в паспорте устройства. Управление электродвигателя осуществляется за счет блока управления заданного в преобразователь частоты. С помощью алгоритма преобразователь задает частоту вращения стандартное значение которой составляет 50 Гц и вызывает соответственно 50 колебательных периодов за секунду. Задается бессенсорное управление, которое осуществляется за счет назначения зависимостей чередования между последовательностями широтно-импульсных модуляций инвертора для предварительно составленных алгоритмов. Регуляция размера амплитуды и выходной частоты, которую имеет напряжение, осуществляется в соответствии со скольжением и нагрузочным током, но обратная связь от роторной вращательной скорости не учитывается. Таким образом управление подруливающим устройством осуществляется с помощью подачи тока на преобразователь частоты мощностью 380 В, который в свою очередь преобразует сигнал из постоянного тока в переменный и с помощью разработанного алгоритма управления подает необходимую частоту вращения на электродвигатель привода подруливающего устройства, который в свою очередь регулирует работу подруливающего устройства. Блок-схема управления представлена на рисунке 6: 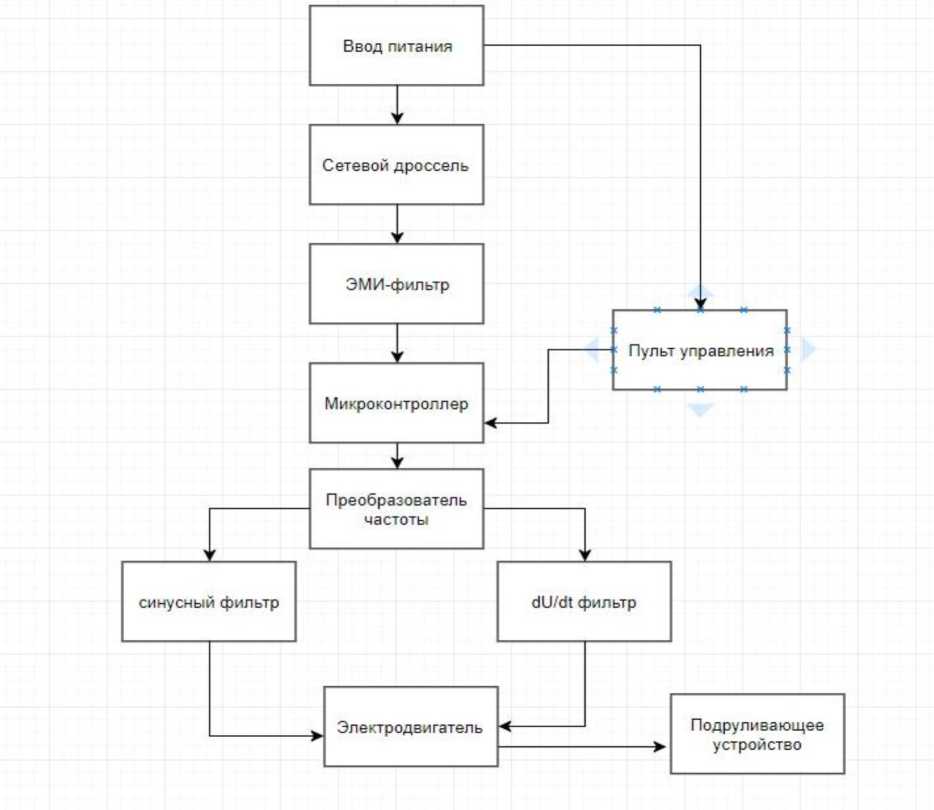 Рисунок 6 - Блок-схема управления подруливающим устройством. Управление всеми рабочими процессами преобразователя частоты электропривода будет осуществляться с помощью микропроцессорного контроллера УМКА-27. Данный микроконтроллер является также как и преобразователь частоты АТ24 мультидрайв разработкой компании Триол. Он хорошо себя зарекомендовал в работе на насосных станциях, буровых установках, судовых двигателях. Работа осуществляется на базе современного двуядерного микропроцессора. Данное устройство является актуальным и соответствует всем современным стандартам. Установка асинхронного двигателя ДВА-700-4ОМ4 в совокупности с преобразователем частоты AT24-M71-690-P10000-LC в составе привода подруливающего устройства подводного аппарата полностью оправдана. Первопричиной является то, что оба устройства -производства Российской Федерации. Это означает, что у пользователя не возникнет проблем с освоением устройств и поиска запасных деталей. Исполнение обоих устройств - вертикальное. Именно по этой причине не возникнет проблем с монтажом и совокупным использований устройств. Если обратиться к характеристикам электродвигателя приведенным выше в таблице и к характеристика преобразователя приведенным в таблице, то можно заметить практически полную совместимость. Совместимость в диапазоне напряжения подаваемого тока, номинальной мощности электродвигателя, полной мощности электродвигателя, диапазоне выходной частоты, частоте тока при входе и что наиболее важно в максимальном показателе отклонений, Помимо этого соблюдено полное соответствие типа двигателя преобразователю- асинхронный, соответствие в количестве фаз - три .В совокупности это дает практически полную универсальность в использовании и при создании блока управления подруливающим устройством. Особенно, если учитывать, что в условиях нахождения под водой необитаемого аппарата, прибегать к использованию подруливающего устройства пользователю приходиться достаточно часто. Частотное регулирование скорости асинхронного двигателя позволяет изменять угловую скорость вращения в диапазоне - 20...30 к 1. Регулирование скорости асинхронного двигателя вниз от основной осуществляется практически до нуля. Связь между угловой скоростью вращения и частотой питающего тока вытекает из уравнения: шо = 2nf1/p При не изменяющимся напряжении источника питания и изменении частоты, изменяется магнитный поток асинхронного двигателя. При увеличении частоты питания стоит пропорционально увеличивать напряжение, с целью сохранения магнитного потока постоянным, в противном случае это может привести к перегрузке. Частотный способ является наиболее перспективным для регулирования асинхронного двигателя с короткозамкнутым ротором, которым является двигатель ДВА- 700-4ОМ4 . Работа при таком методе не сопровождаются увеличение скольжения, а потери мощности невелики. 2.2 Описание принципа работы асинхронного электродвигателя ДВА- 700-4ОМ4 Двигатель вертикальный асинхронный ДВА-700-4ОМ4 предназначен для работы в составе частотно-регулируемого привода электрооборудования. Используется на судах различного назначения в условиях неограниченного района плавания. Климатическое исполнение и категория размещения двигателя - ОМ4 по ГОСТ 15150-69 и ГОСТ 15543.1-89. Основные параметры и характеристики двигателя: Диапазон частоты вращения 0-1500 об/мин. Режим работы двигателя - режим с непериодическими изменениями нагрузки и частоты вращения с реверсами до 2 в минуту и электрическим торможением на резисторы преобразователя частоты В диапазоне частот вращения 0-1500 об/мин момент сопротивления приводимого механизма Ммех должен соответствовать зависимости Ммех=Мном(п/пном)2 ,где n - частота вращения, Мном, пном - номинальный момент и номинальная частота вращения двигателя - Обмотка статора должна быть изготовлена из провода с напряжением не менее 2,5 кВ. Г абаритные и установочные размеры приведены в приложении А. Устройство двигателя приведено в приложении Б. Основные параметры двигателя при питании от сети общего назначения приведены в таблице 1: Таблица 1 Основные параметры двигатели при питании от сети
Примечания 1 Ммакс - отношение максимального момента к номинальному; М ном 2 Предельно допускаемые отклонения параметров: Коэффициент полезного действия п: минус 10% от (100-п); Коэффициент мощности, cosф: минус 1/6 (1-cosф); Максимальный вращающий момент, минус 10%; Отклонения в противоположную сторону не регламентируются. Схема внешних подключений приведена в таблице 2: Таблица 2 Схема внешних подключений
| ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||