Етерство образования и науки российской федерации
 Скачать 1.38 Mb. Скачать 1.38 Mb.
|

|
Рисунок 13 - Блок-схема меню управления С помощью меню управления микроконтроллером системы можем регулировать параметры работы преобразователя и электродвигателя. Осуществлять пуск и остановку с помощью канала управления, задавать необходимые нам параметры управления устройством при помощи канала задания. Реализовывать параметры дополнительных функций таких как: режим «подхват».режим «каскад».выполнять проверку двигателя, осуществлять торможение. Мастер настройки позволяет нам настроить параметры двигателя. Последовательно задавая значения. Реализуется настройка параметров номинального тока двигателя, частоты пуска, время разгона. Для настройки необходимо зайти с помощью панели управления микроконтроллером в меню быстрый старт, мастер настройки. На экране появиться значение и название первого параметра. Далее для редактирования предложенного параметра нажимаем клавишу «ввод» или «вправо». Для выхода из режима редактирования выбранного параметра нажимаем клавишу «ввод» или «отмена». Подробная разработанная структура для настройки параметра двигателя представлена на рисунке 14 : 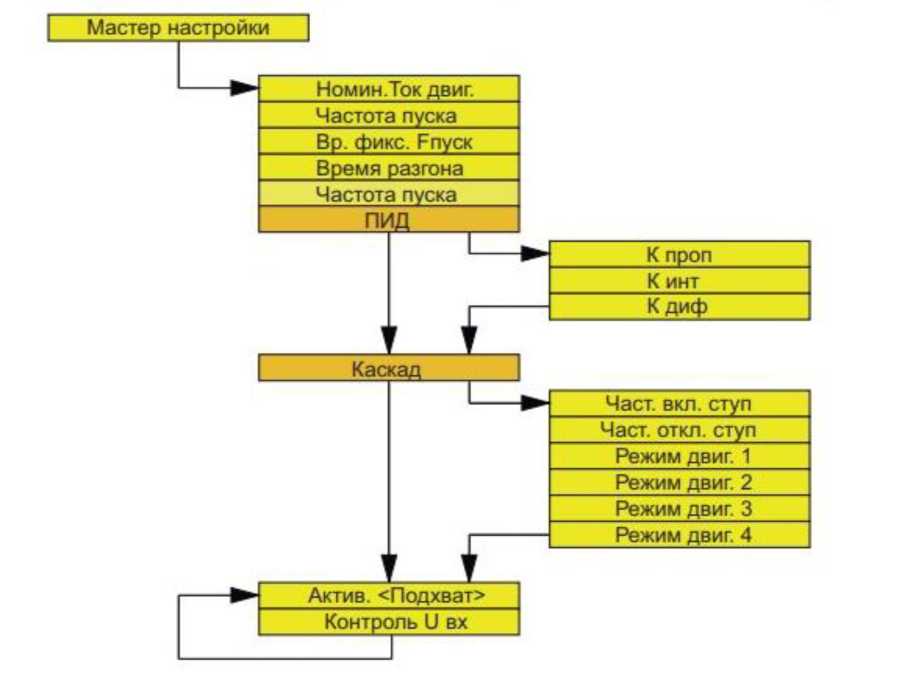 Рисунок 14 - Структура настройки параметров двигателя Мастер настройки ПИД-регулятора позволяет настроить параметры регулятора, последовательно задавая значения необходимых параметров. Принцип работы с мастером настройки аналогичен мастеру настройки электродвигателя. Подробная структура меню для настройки параметров представлена на рисунке 15.  
Z3 Част, вкл. ступ Част, откл. ступ Режим двиг. 1 Режим двиг, 2 Режим двиг, 3 Режим двиг. 4 t | Актив. <Подхват> Контроль U вх Рисунок 15 - Меню настройки параметров ПИД-регулятора Таким образом, чтобы настроить электропривод подруливающего устройства необходимо сделать следующий алгоритм действий: Зайти в меню «Быстрый старт»; Установить наиболее подходящий для системы управления макрос настройки типа управления (параметр «Макрос тип упр.» в меню «Быстрый старт» -> «Макросы»). При необходимости изменить значения параметров установленных макросом, зайти в список последних изменённых параметров; Установить в соответствии с системой управления макрос настройки задания (параметр «Макрос тип зад.» в меню «Быстрый старт» -> «Макросы»). При необходимости изменить значения параметров устанавливаемых макросом (например в списке изменённых параметров); Задать темпы разгона и торможения в меню параметров «Быстрый старт» -> «Настройка электропривода» -> «Генератор темпа»; При необходимости провести дополнительную (полную) настройку электропривода для этого зайти в меню «Настройки». 3.3 Реализация алгоритмов управления и программирования преобразователем частоты АТ24 Для подключения всех линий электропривода к внешней сети связи будет использован интерфейсный блок. За основу возьмем интерфейсный блок Triol ANET_RS485, разработка концерна триол, которая будет отлично сочетаться в совокупности электроприводом серии АТ. Интерфейсным блок позволит не только управлять электроприводом сигналами от внешнего контроллера, но и управлять электроприводом в смешанном режиме, при котором часть информации поступает по сети от внешнего контроллера, а часть от других возможных источников сигналов, например от датчиков на цифровые и аналоговые входы электропривода. При помощи интерфейсного блока преобразователь будет обмениваться данными с внешними устройствами по физическому интерфейсу RS485 и протоколу стандарта MODBUS.При разработке блока управления именно интерфейс RS485 является оптимальным по причине наиболее широкого использования промышленными устройствами, которые используют двунаправленную сбалансированную линию передачи. При работе с интерфейсом RS485 максимальная скорость передачи данных от внешних устройств к внутреннему микроконтроллеру преобразователя частоты будет ровняться 10 мБит/с. Расстояние передачи будет ровняться 1200 м. На рисунке 16 представлен внешний вид интерфейсного блока Triol ANET_RS485:  Рисунок 16 - Внешний вид интерфейсного блока Triol ANET_RS485 Modbus - это протокол последовательной связи. Обмен данными будет осуществляться в конфигурации «одно ведущее устройство и несколько ведомых устройств». Для связи используется сеть RS845 исключительно с одним ведущим устройством. Протокол дистанционного управления Modbus RTU Mode будет определять структуру сообщений, которые будет поддерживать привод и внешние по отношению к нему устройства. Данный протокол определяет процедуру при помощью которой один контроллер может послать запрос другому, ответить на запрос, сформировать сообщение в случае ошибки при обмене. Сетевой обмен инициируется ведущим или администратором сети в рамках протокола, ведомые устройства могут только отвечать на запросы ведущего или выполняют процедуру, которая предписана сообщением от ведущего. Устройство, выполняющее функции ведущего, должно иметь в своем составе пульт управления и средства отображения информации. Привод всегда выполняет функцию ведомого устройства. Список команд контролера представлен в приложении Д. В протоколе RTU Mode размер передаваемого сообщения составляет 8 бит. В электроприводе при обмене данных по протоколу MODBUS используются следующие типы данных приведенные в таблице 7 и 8: Таблица 7 Типы данных для 16-битовых значений
Таблица 8 типы данных для 32-битовых значений
Формирование адреса регистра - числа в HEX будет формироваться по следующему правилу: Адрес регистра = 0NG*128 + NP, где 0NG - номер группы, в номере группы возможны значения от 0 до 99. NP - номер параметра в группе, в параметр также нумеруется значениями от 0 до 99. Если необходимо сформировать расширенное значение параметра, то адрес регистра будет следующим: Адрес регистра = 0x8000 + NG*128 + NP Сформированный список команд для электропривода АТ24 для поддержания обмена с использованием команд протокола MODBUS представлен в таблице9: Таблица 9 Список команд для поддержания обмена с использованием команд протокола Modbus
В протоколе MODBUS предусмотрен CRC код. Этот код используется для защиты информации, защищающий все сообщение от посылающего устройства к передающему. Код формируется посылающим информацию устройством при подготовке сообщения к передаче. Принимающее устройство вычисляет в процессе приема информации значение CRC кода и в случае несовпадения кода с принятым сообщением, будет восприниматься устройством как ошибка при приеме сообщения. Ведомое устройство не будет отвечать на такие сообщения. CRC код представляет собой 16-ти разрядный двоичный код (2 байта) Сформируем вычисление кода по следующему алгоритму: Загружаем 16-разрядный регистр (CRC код FFFF HEX (все «1»)). Производим операцию «исключающее ИЛИ» между первым байтом сообщения (сетевой адрес) без стартовых, стоповых битов и бита контроля четности и младшим байтом регистра CRC. Помещаем результат в младший байт регистра CRC. Производим сдвиг содержимого CRC регистра вправо (в сторону младшего бита) с заполнением освободившегося старшего бита значением «0». Извлекаем и проанализируем бит переноса. В случае, если бит равен «0» — повторяем шаг № 3 (еще один сдвиг вправо). Если бит равен «1» — производим операцию «исключающее ИЛИ» между содержимым CRC регистра и полиномом А001 HEX (1010 0000 0000 0001). Результат помещаем в CRC регистр. Повторяем шаги 3, 4, пока не будет выполнено 8 сдвигов. Этим завершается вычисление CRC кода для сообщения, состоящего из одного байта. Повторяем шаги 2, 5 для следующего байта сообщения. Продолжаем процесс до вычисления CRC кода всего сообщения (содержимое регистра CRC после обработки всех байтов сообщения). Таким образом выполнив алгоритм, CRC код, который вычислен ведущим устройством, отправляется линию связи после последнего байта данных. В процессе обмена данными электропривод выступает как ведомое устройство. Адрес в сети определяется редактированием параметра электропривода - 35.00. Где 35 - номер группы параметров, а 00 - номер параметра в группе. Допустимый диапазон адресов от 1 до 255. В параметрах электропривода имеется возможность настроить скорость обмена между устройствами. Для получения текущего значения параметров электропривода подруливающего устройства формируется запрос,. в соответствии с протоколом MODBUS при помощи функций 0х03 или 0х04. От электропривода будет передано значение запрошенных параметров. В таблице 10 приведен пример формирования запроса и ответа: Таблица 10.1 Запрос
Таблица 10.2Ответ
Для управления и индикации промежуточного или конечного состояния, а также для характеристики результата операций используются флаги. Для описания используем структуру основных флагов параметра, приведенных в таблице11: Таблица 11 основные флаги параметра
Для изменения параметров электропривода можно использовать функции 0х06 или 0х10. Изменения параметров имеющих значение 16 бит можно с использованием обоих функций, однако для параметров имеющих значение 32 бит следует использовать только функцию 0х10.В Для формирования команд и для управления логическими дискретными сигналами используется функция 0х05. Логические дискретные входы равносильны сигналам, поступающим от дискретных входов электропривода. Логические дискретные входы сохраняют свое состояние до подачи новой команды. Логические дискретные входы, после подачи питания на электропривод , всегда сброшены в состояние «выключено». Через данные входы организуется управление пуска и выключения привода, управление дискретными релейными выходами, переключается задание для электропривода. Блок-схемы управлением и инициализацией преобразователя представлены в приложении Е. Для реализации установки значения группы параметров в соответствии подключаемых схема привода, будут установлены макросы. Макросы представляют собой запрограммированные наборы параметров. Они делятся на две группы: - Макросы настройки управления двигателем. Управление командами «пуск/стоп», направление вращения двигателя. - Макросы настройки задания. Под настройкой понимается тип параметра и соответствующие настройки групп параметров, Макросы управления двигателем работают в режиме двухпроводным и трехпроводным управлением двигателем, а также макрос «управление местным пультом». При выборе макроса двухпроводного управления электроприводом, формируется конфигурация для управления по двухпроводной схеме управления. При подаче высокого уровня на дискретный вход 1 происходит пуск двигателя в прямом направлении, при пропадании высокого уровня происходит останов двигателя, при подаче высокого уровня на дискретный & вход 2 происходит пуск двигателя в обратном направлении, при пропадании высокого уровня происходит остановка двигателя. На рисунке 17 представлено подключение цепей управления к плате управления электроприводом при использовании данного макроса: 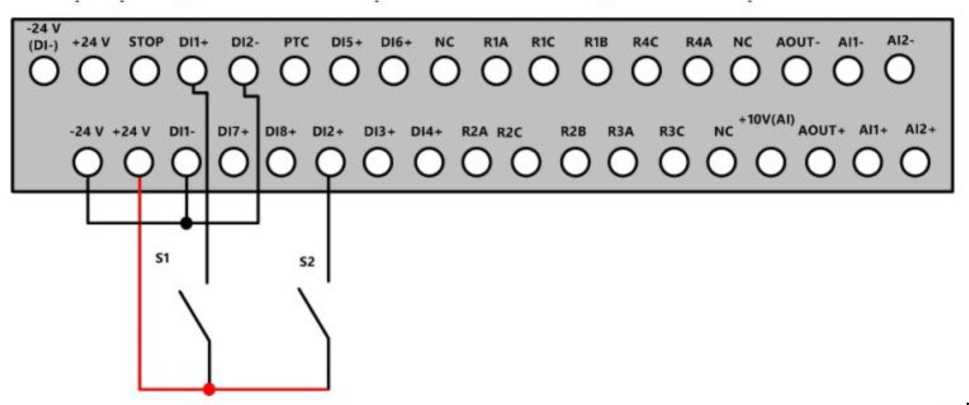 Рисунок 17 - Подключение цепей управления к плате управления при использовании макроса двухпроводного управления. Таким образом, при включенном выключателе S!, будет происходить пуск двигателя в прямом направлении, при включенном выключателе S2 будет осуществлен пуск в обратном направлении вращения ротора, реверс. При включенных S1 и S2 в соответствии с алгоритмом управления будет производиться пуск в прямом направлении, если установлен параметр «вперед», и реверс, в случае, если установлен параметр «назад». При выборе макроса трехпроводного управления электроприводом используется три выключателя S1, S2, S3. Алгоритм работы при использовании данного макроса происходит следующим образом: при выключенных всех трех выключателях - двигатель остановлен, при включенном S1 - двигатель запущен в прямом направлении, далее, отключив S1 работа продолжается в прямом направлении, при включении S2 происходит реверс, затем при выключении осуществляется работа в обратном направлении, при включении S3 происходит остановка двигателя. На рисунке 18 представлено подключение цепей управления к плате управления электроприводом при использовании данного макроса: 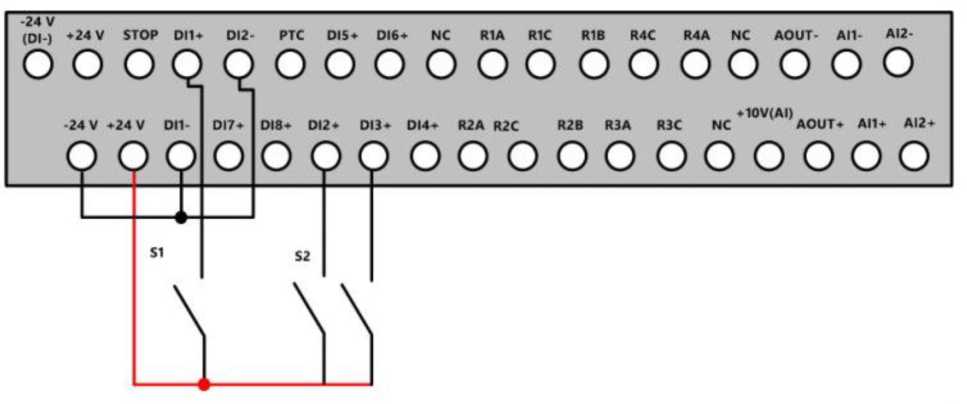 Рисунок 18 Подключение цепей управления к плате управления при использовании макроса трехпроводного управления Макросы настройки задания делятся на: макрос ПИД-регулятора, и на макрос дискретного задания частоты двигателя. При выборе макроса ПИД-регулятора электропривод конфигурируется от работы по заданию от ПИД-регулятора. На рисунке 19 представлено подключение к блоку управления электроприводом (NVSA) и блоку ANET разработки компании триол:          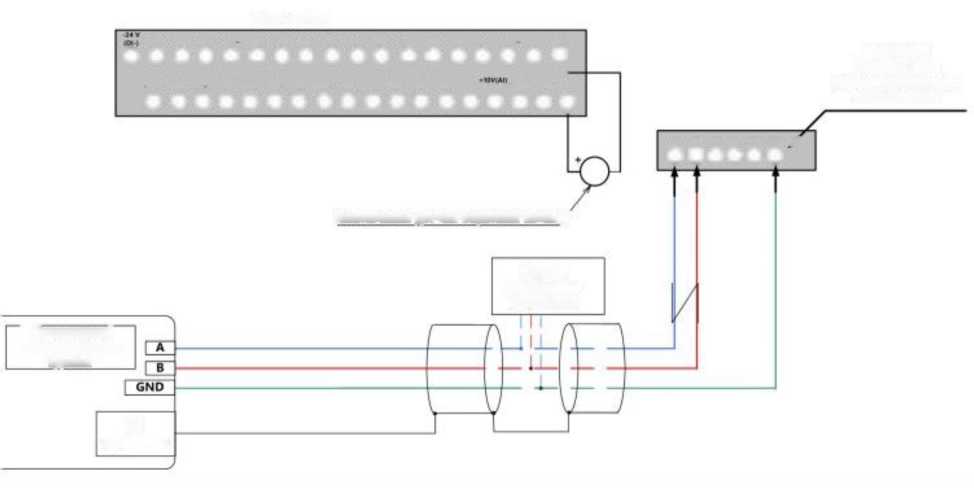 Блок NVSA Блок ANET Привод Триол является конечным звеном в сети Аналоговый датчик обратной связи / РЕ устройства *24» *ТО» ОЛ- 012 ГТС 0*5 • МЛ- ЧС >1* »К HIP МС Я4А НС АООТ All- А12- ООООООООООООООООО9 24 V -24V ОН sx?. ОН- М2- ОН- ОМ- A2A «21 kzl #1» ПК м: AOUT- АН. АН- OOOOOOOOOOOOOOOOOQ At П А2 U ОНО «NO Jf 000000 Другое подчинено? устройство —Контроллер" автоматизации здания Рисунок 19 подключение к блоку управления электроприводом при выборе макроса ПИД-регулятором При использовании макроса «дискретное задание частоты вращения двигателя», скорость вращения двигателя будет регулироваться от дискретных входов. На рисунке 20 показано подключение цепей управления к плате управления электроприводом при использовании данного макроса: 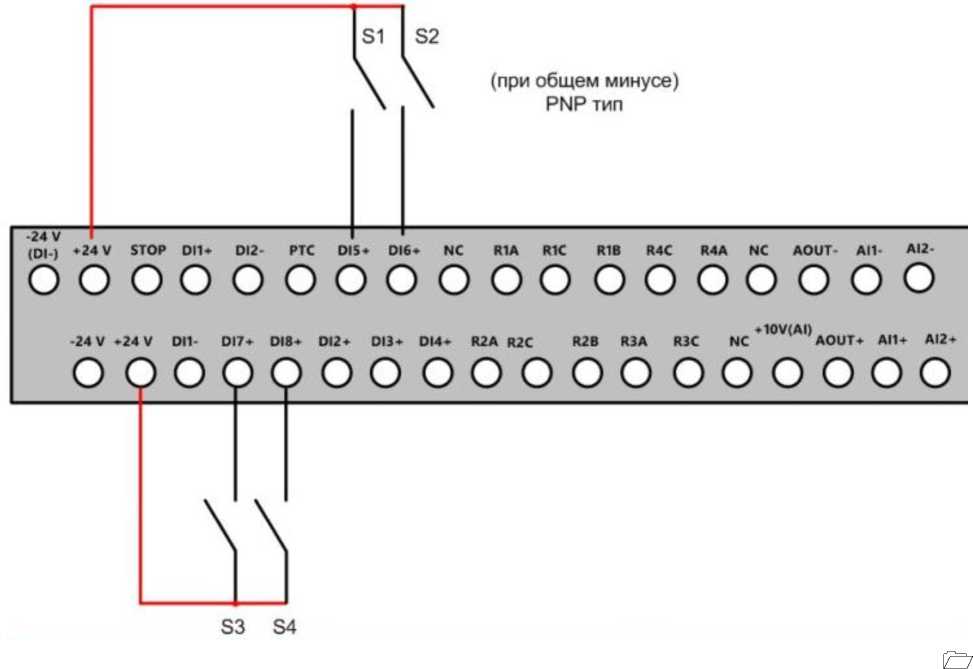 Рисунок 20 - подключение цепей управления к плате управления при использовании макрос «Дискретное задание частоты вращения вдигателем». Рисунок 20 - подключение цепей управления к плате управления при использовании макрос «Дискретное задание частоты вращения вдигателем».Алгоритм работы данного макроса заключается в том, что при активации выключателей S1... S4 происходит изменение частоты двигателя в диапазоне от 20 до 50 вращений в секунду. Таким образом управление преобразователем частоты регулируется при помощи пульта управления, а блок управления будет создаваться на основе пользовательских решений по алгоритму работы. Данный блок управления позволит создать блок управления подруливающим устройством подводного аппарата, исходя из условий нахождения под водой. Помощником при разработке алгоритма может стать прилагающийся к устройствам демокейс. Он способствуем ускоренному оснвонию конструкции устройств и принципов работы с ним при создании блока управления. Возможность задания множества конфигураций управления и разнообразие функций открывает возможности для создания всевозможных алгоритмов управления. Это может дать огромный толчок при развитии автоматизации управления в Российском судостроении и позволит раскрыться всем потенциальным возможностям отечественных устройств, на базе которых сформируется управление. В данной главе была представлена разработанная силовая схема устройства протекающих процессов, в электроприводе. Изучены принципы работы с пультом управлением контроллера, и на основе полученных знаний составлен алгоритм работы в задании команд на примере блок-схем. Разработан блок управления электроприводом подруливающего устройства на основе устройств изученных в главе 2, а также представлен алгоритм управления. За основу при изучении принципов управления был взят материал изученного демокейса устройстваю ЗАКЛЮЧЕНИЕ На сегодняшний день актуальность решения задачи блока управления является одной из самых приоритетных. Для разработки блока управления электроприводом необходимо иметь в своем распоряжении самое современное оборудование. За основу можно брать отечественное оборудование технические характеристики и возможности которых не уступают иностранным аналогам, при этом имеют менее высокую стоимость. Актуализация блока управления откроет возможности для управления необитаемым подводным аппаратом, наиболее глубоко раскроет потенциал управляемых устройств, а также расширит навыки разработчиков, что позволит с помощью данных аппаратов более активно исследовать океаническое дно, совершив большое количество открытий в различных областях. В ходе данной работы были исследованы и изучены характеристики и принцип работы таких устройств как: асинхронный трехфазный электродвигатель ДВА-700-4ОМ4, а также преобразователь частоты AT24 серии «Мультидрайв». В главе 1 проведено исследования принципа работ система автоматического управления, представлены всевозможные вариации исполнения. Исследован принцип работы подруливающего устройства, приведена классификация всевозможных вариаций исполнения и возможных видов осуществления работ. Приведен принцип работы асинхронного электродвигателя. Представлены все возможные принципы управления двигателем, а также рассмотрен состав двигателя. Исследована модель работы преобразователя частоты рассмотрены всевозможные функции устройства. В главе 2 проведен анализ выбор необходимых составных устройств электропривода. Приведены характеристики устройств. Исследован принцип совместимости асинхронного электродвигателя ДВА-700-4ОМ4 и преобразователя частоты AT24 серии «Мультидрайв». Помимо этого была представлена схема управления электроприводом подруливающего устройства на основе использования данных устройств. В главе 3 была представлена и проанализирована разработанная силовая схема устройства преобразователя частоты. Исследованы и разработан алгоритм задания команд пульту управления устройства электропривода. Разработан блок управления. Представлен алгоритм управления преобразователем частоты. В процессе выполнения работы решены такие задачи как: - Исследование систем автоматического управления судном - Анализ характеристик и выбор составных устройств: электродвигателя и преобразователя частоты - Исследование и анализ возможности совокупной работы устройств - Разработка силовой схемы устройства - Разработка блока управления - Разработка алгоритма управления преобразователем частоты Список использованных источников Вагущенко Л.Л., Цымбал Н.Н. Системы автоматического управления движением судна. - 3-е изд., перераб. и доп.- Одесса: Фешкс, 2007. - 328 с. Клевцов А.В. Преобразователи частоты для электропривода перменного тока. - Москва: Гриф и ко, - 2008. - 224 с. Ющенко Л.В.Асинхронные двигатели с фазным ротором и схемы управления. Учебно-методическое пособие.., Хабаровск, 1999 - 88 с А. С. Сандлер, Г. К. Аввакумова, А. В. Кудрявцев, А. А. Никольский. Преобразователи частоты на тиристорах для управления высокоскоростными двигателями. Москва, «Энергия», 1970. 377 с. http://www.power-e.ru/2004_ 01_50.php http://www.dissercat.com/content/chastotnyi-elektroprivod-maloi- moshchnosti-s-bestransformatornymi-preobrazovatelyami-chastot Глазенко Т.А. Полупроводниковые преобразователи в электроприводах постоянного тока. Л.: Энергия, 1973. Проектирование электрических машин./Под ред.И. П. Копылова. М., 1980. — 495 с Кацман М. М. Руководство к лабораторным работам по электрическим машинам и электроприводу. М., 1983. — 215с. Андреев В.П., Сабинин Ю.А. Основы электропривода. - М.; Л.: Госэнергоиздат, 1963. - 772 с. Романенко В.Д. Методы автоматизации прогрессивных технологий. - М.: Высш. шк., 1995. http: //engineering- solutions .ru/motorcontrol/induction3ph/#squirrel_cage http://www.electroengineer.ru/2015/03/design-and-operation-of- induction-motors Бриндли К. измерительные преобразователи: Справочное пособие. - М.: Энергоатомиздат, 1991.-144 с Преобразователь частоты ТРИОЛ АТ24 «Мультидрайв». Руководство по эксплуатации АТ.654.226.921 РЭ - Москва 2016.193 с. Двигатель вертикальный асинхронный ДВА-700- 4ОМ. Руководство по эксплуатации ГАЕИ.528222.023.РЭ. - Москва 2014 - 33 с. http: //www.electroengineer.ru/2014/10/marine-motors .html http://electricalschool.info/elprivod/1740-chastotnoe-regulirovanie- asinkhronno go. html http://triolcorp.ru/product/low-voltage_ equipment/triol-at24/ http://triolcorp.ru/wp-content/themes/TriolCorp/files/tech- doc/AT24/at24_ lineE.pdf Белов А.В. Программирование микроконтроллеров для начинающих и не только. - М; Наука и техника. 2016 - 352 с. http: //ecskat.ru/service/Pro grammirovanie/Pro grammirovanie_mikrokont rollerov/ http: //microkontroller.ru/pro grammirovanie-mikrokontrollerov- avr/programmirovanie-avr/ Статья, анализ и актуализация синтезатора частоты привода подруливающего устройства, Пушкин Д.А., 2017 - 8 с. Борцов, Ю. А. Автоматизированный электропривод с упругими связями / Ю.А. Борцов, Г.Г. Соколовский. - М.: Энергоатомиздат, 1992. - 288 c. Фираго, Б.И. Регулируемые электроприводы переменного тока / Б.И. Фираго, Л.Б. Павлячик. - М.: Техноперспектива, 2006. - 363 c. 27.Основы микропроцессорной техники: учебное пособие: в 2 кн. / О. П. Новожилов. — 2-е изд.. — М.: РадиоСофт, 2011 Кн. 1. — 2011. — 432 с.: ил.. — Библиогр.: с. 430-431. — Аббревиатура: с. 427. — Предметный указатель: с. 428-429 Водовозов, А.М. Микроконтроллеры для систем автоматики: учебное пособие / А.М. Водовозов. - Вологда: ВоГТУ, 2002. - 123 с Рюмик, С.М. 1000 и одна микроконтроллерная схема. Книга 1 / С.М. Рюмик. - М.: Додэка-XXI, 2012. - 356 с. Бродин, В.Б. Микроконтроллеры. Архитектура, программирование, интерфейс / В.Б. Бродин, М.И. Шагурин. - М.: ЭКОМ, 1999. - 400 с ПРИЛОЖЕНИЕ А Габаритные установочные размеры и масса двигателя ДВА-700-4ОМ4 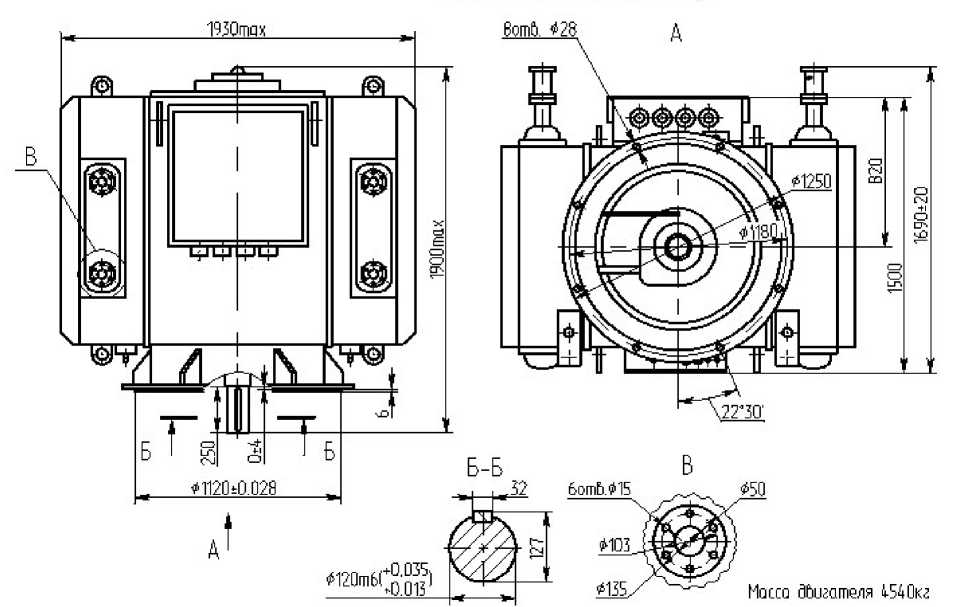 ПРИЛОЖЕНИЕ Б ПРИЛОЖЕНИЕ БУстройство двигателя ДВА-700-4ОМ1 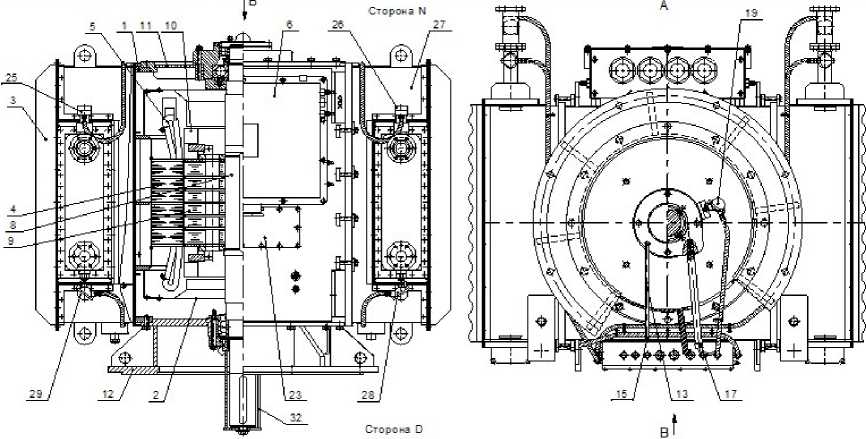 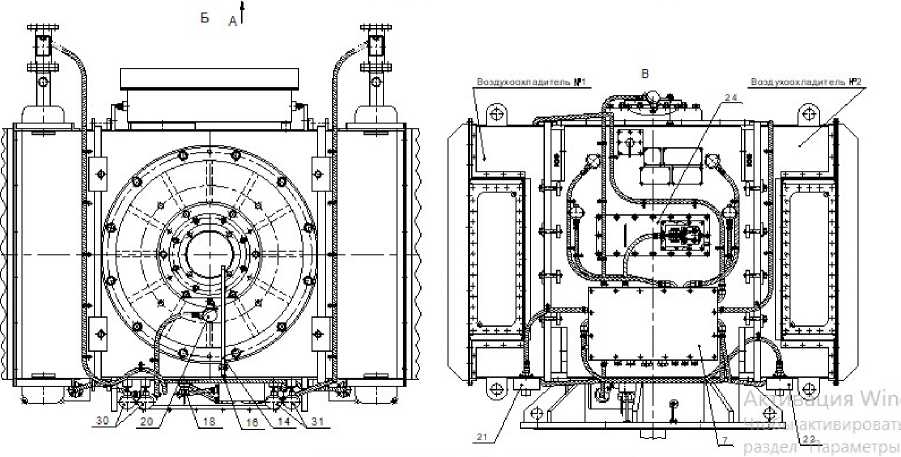 ПРИЛОЖЕНИЕ В Г абаритные размеры воздухоохладителя 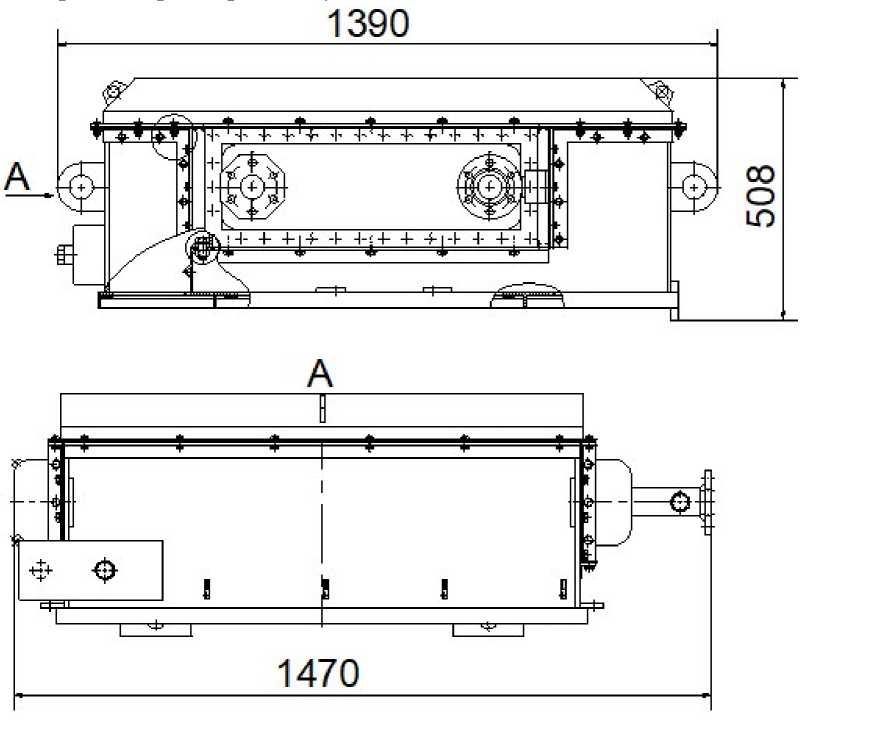 ПРИЛОЖЕНИЕ Г Габаритные размеры преобразователя частоты АТ24 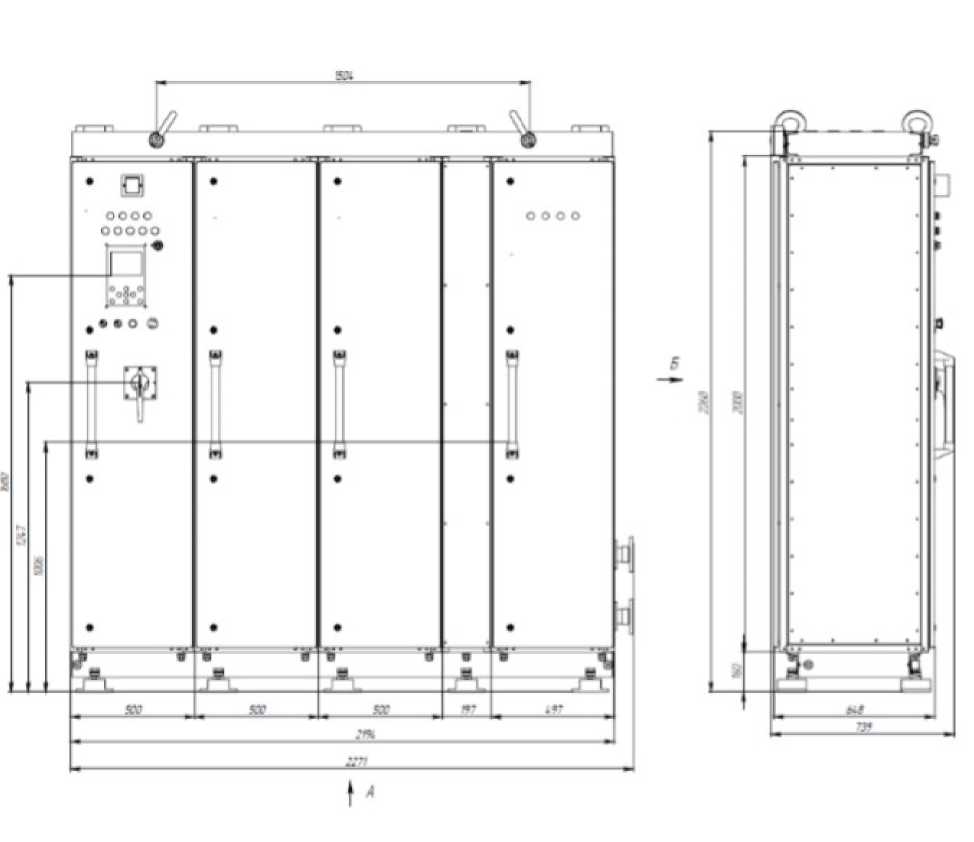 ПРИЛОЖЕНИЕ Д ПРИЛОЖЕНИЕ ДСписок параметров контроллера преобразователя частоты | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||