Етерство образования и науки российской федерации
 Скачать 1.38 Mb. Скачать 1.38 Mb.
|

|
РГГМЫ : ЕТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ РОССИЙСКОЙ ФЕДЕРАЦИИ •ед-еральное государственное бюджетное образовательное учреждение высшего образования «РОССИЙСКИЙ ГОСУДАРСТВЕННЫЙ ГИДРОМЕТЕОРОЛОГИЧЕСКИЙ УНИВЕРСИТЕТ» Кафедра морские информационные системы ВЫПУСКНАЯ КВАЛИФИКАЦИОННАЯ РАБОТА ■ вгк Разработка блока управления привода подруливающего устройства 23»: д-ого аппарата те нтель Пушкин Даниил Александрович (фамилия, имя, отчество) к: 2 нтель Старший преподаватель факультета информационных : -ей и систем безопасности, к.т.н. (ученая степень, ученое звание) safSE Наталья Владимировна (фамилия, имя, отчество) ш-п - допускаю»  2018 г. РГГМЫ МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ РОССИЙСКОЙ ФЕДЕРАЦИИ федеральное государственное бюджетное образовательное учреждение высшего образования «РОССИЙСКИЙ ГОСУДАРСТВЕННЫЙ ГИДРОМЕТЕОРОЛОГИЧЕСКИЙ УНИВЕРСИТЕТ» Кафедра морские информационные системы ВЫПУСКНАЯ КВАЛИФИКАЦИОННАЯ РАБОТА На тему Разработка блока управления привода подруливающего устройства подводного аппарата Исполнитель Пушкин Даниил Александрович (фамилия, имя, отчество) Руководитель Старший преподаватель факультета информационных технологий и систем безопасности, к.т.н. (ученая степень, ученое звание) Яготинцева Наталья Владимировна (фамилия, имя, отчество) «К защите допускаю» Заведующий кафедрой (подпись) (ученая степень, ученое звание) (фамилия, имя, отчество) «___» 2018 г. федеральное государственное бюджетное образовательное учреждение высшего образования «РОССИЙСКИЙ ГОСУДАРСТВЕННЫЙ ГИДРОМЕТЕОРОЛОГИЧЕСКИЙ УНИВЕРСИТЕТ» Кафедра морских информационных систем «УТВЕРЖДАЮ» и.о. заведующего кафедрой Завгородний В.Н. «___» 2018 года Задание на выпускную квалификационную работу студенту Пушкину Даниилу Александровичу Тема «Разработка блока управления преобразователем частоты привода подруливающего устройства подводного аппарата». закреплена приказом ректора Университета от «___» 201__года, № . Срок сдачи законченной работы «___» 2018 года. Исходные данные к выпускной квалификационной работе: учебная литература по теме «Преобразователь частоты», научно-практическая литература по теме работы за последние 3 года, эксплуатационная документация. Перечень вопросов, подлежащих разработке (краткое содержание работы (проекта): Введение. Актуальность темы, цели и задачи выпускной квалификационной работы. - Глава 1. Системы автоматическим управлением судном Описание системы автоматического управления судном. Подруливающие устройства Принцип работы асинхронного электродвигателя Принцип работы преобразователя частоты Глава 2. Составляющие электропривода подруливающего устройства В данной главе необходимо рассмотреть следующие вопросы: Схема управления подруливающими устройствами Описание принципа работы асинхронного электродвигателя ДВА-700- 4ОМ4 Устройство и принцип работы преобразователя частоты АТ24 «Мультидрайв». Глава З.Разработка блока управления преобразователем частоты привода подруливающего устройства В данной главе необходимо рассмотреть следующие вопросы: Силовая схема преобразователя частоты АТ24 Алгоритм работы с пультом управления преобразователем Реализация алгоритмов управления и программирования преобразователем частоты АТ24 Заключение. Выводы по работе в целом. Оценка степени решения поставленных задач. Практические рекомендации. Перечень материалов, представляемых к защите: диплом, презентация Консультанты по работе с указанием относящихся к ним разделов работы: Дата выдачи задания: «___» 2018года Содержание «РОССИЙСКИЙ ГОСУДАРСТВЕННЫЙ ГИДРОМЕТЕОРОЛОГИЧЕСКИЙ УНИВЕРСИТЕТ» 1 ВЫПУСКНАЯ КВАЛИФИКАЦИОННАЯ РАБОТА 1 ГИДРОМЕТЕОРОЛОГИЧЕСКИЙ УНИВЕРСИТЕТ» 2 ВЫПУСКНАЯ КВАЛИФИКАЦИОННАЯ РАБОТА 2 Заведующий кафедрой 2 Кафедра морских информационных систем 3 5.Перечень материалов, представляемых к защите: диплом, презентация 4 Содержание 4 ВВЕДЕНИЕ 6 1Система автоматического управления судном 9 2Составляющие электропривода подруливающего устройства 27 2.2 Описание принципа работы асинхронного электродвигателя ДВА- 700-4ОМ4 30 2.3 Устройство и принцип работы преобразователя частоты АТ24 «Мультидрайв». 39 3.1 Силовая схема преобразователя частоты 51 3.2 Алгоритм работы с пультом управления 53 ЗАКЛЮЧЕНИЕ 70 Список использованных источников 72 ПРИЛОЖЕНИЕ А 75 ПРИЛОЖЕНИЕ Г 79 ПРИЛОЖЕНИЕ Д 80 Приложение Е 84 ПРИЛОЖЕНИЕ Д 81 Приложение Е 83 ВВЕДЕНИЕ На сегодняшний день управление множеством устройств вокруг нас автоматизировано. Развитие современных технологий подразумевает под собой частичную или полную автоматизацию систем управления. Все вокруг нас - начиная с бытовой техники и заканчивая системой управления судном, управляется с помощью заданного алгоритма управления. Перед будущим поколением инженеров стоит множество сложных и актуальных задач. В частности такие задачи как: конструирование современных программируемых устройств управления, а также создания и актуализация современных блоков управления. Российское судостроение на данный момент является одним из самых динамично развивающихся и передовых отраслей промышленности. Современное судно представляет собой целостный организм, связанный воедино бортовым компьютером, управляемым, программируемым и контролируемым экипажем судна. Морфлот Российской Федерации имеет в своем распоряжении самые передовые суда. Многие эти суда имеют достаточно сложное устройство и оснащены самыми современными приводами управления, в основе которых лежат технологичные и современные подруливающие устройства, на базе асинхронных электродвигателей. Под управлением, как правило, принято считать процесс изменения одним объектом состояния другого объекта с помощью целенаправленных управляющих воздействий или команд. Командная система и объект управления взаимодействуют друг с другом, образуя систему управления. Задача автоматизации систем управления состоит в том, чтобы частично или полностью освободить человека от непосредственного участия в процессе управления судном. Система выполняющая свои функции автоматически, без участия человека, называются системы автоматического управления (САУ). Введение в эксплуатацию блока управления привода подруливающего устройства подводного аппарата, значительно упростит взаимодействие необитаемого подводного аппарата и человека. Разработка современного блока управления даст в развитии толчок не только обслуживающему персоналу, но и отечественной IT-сфере, сформирует вокруг себя компетентных специалистов-инженеров. Также это откроет возможность для российских конструкторов принимать участие в создании самых современных подводных аппаратов. Под понятием автоматического управления судном скрывается множество возможностей не только для военной промышленности, но и для научной деятельности, С помощью современных необитаемых аппаратов появляется удивительно широкий спектр открытий в сферах: экологии, океанологии, физики моря. При создании работы было изучено и использовано большое количество технической документации устройств, изучены принципы управления программируемого электропривода. В качестве составных устройств привода приняты современные разработки отечественных концернов. Целью данного исследования является: анализ систем автоматического управления судном, анализ и выбор соответствующего электродвигателя и преобразователя частоты, разработка блока управления преобразователя частоты электропривода, а также разработка алгоритма управления преобразователем частоты. Объектом данного исследования является система автоматического управления судном и подруливающее устройство подводного аппарата. Предметами исследования являются: трехфазный асинхронный электродвигатель, преобразователь частоты, микроконтроллер управления электроприводом. Данное исследование особенно актуально в наши дни. По причине все большего уклона при разработки систем управления в сторону автоматизации. Разработка блока управления современным автоматическим оборудованием является одной из приоритетных задач. Успешная разработка не только поспособствует более эффективному управлению устройствами, но и позволит более эффективно справляться с задачей управления сложным оборудованием, например необитаемым подводным аппаратом. Открываются широкие возможности в исследовании океанического дна, изучения экологических проблем океана, а также в формировании рельефных карт дна. Система автоматического управления судном 1.1 Описание системы автоматическим управлением судном Российское судостроение на данный момент является одним из самых динамично развивающихся и передовых отраслей промышленности. Современное судно представляет собой целостный организм, связанный воедино бортовым компьютером, управляемым, программируемым и контролируемым экипажем судна. Морфлот Российской Федерации имеет в своем распоряжении самые передовые суда. Многие эти суда имеют достаточно сложное устройство и оснащены самыми современными приводами управления, в основе которых лежат технологичные и современные подруливающие устройства, на базе асинхронных электродвигателей. Изучив принципы работы электродвигателей и подруливающих устройств, будет разработан блок управления на базе современной отечественной разработки - преобразователе частоты АТ24 «Мультидрайв». Под управлением, как правило, принято считать процесс изменения одним объектом состояния другого объекта с помощью целенаправленных управляющих воздействий или команд. Командная система и объект управления взаимодействуют друг с другом, образуя систему управления. Задача автоматизации систем управления состоит в том, чтобы частично или полностью освободить человека от непосредственного участия в процессе управления судном. Система выполняющая свои функции автоматически, без участия человека, называются системы автоматического управления (САУ). Автоматизация систем управления судна состоит в применении современных технических и программных средств, которые частично или полностью освобождают человека от участия в управлении. В процессе непосредственной работы системы автоматического управления судном выполняют необходимые функции, программно заданные человеком, образуют сигналы из одного вида в другой. В данной работе будут рассмотрены подобные системы управления, в частности принцип работы подруливающего устройства и синтезатора частоты привода электродвигателя, а также будут исследованы идеи актуализации и разработан прототип системы управления. Возникает необходимость рассмотреть актуализацию разработки блока управления, провести необходимые исследования и на их основе решить задачу разработки собственного блока управления привода подруливающего устройства Для выполнения своих задач САУ снабжается внутренними датчиками информации, средствами связи для получения сведений от внешних источников, устройствами хранения данных, программными средствами, управляющими получением информации от этих источников, ее упорядочиванием и передачей для дальнейшей обработки. Постоянная и медленноменяющаяся информация в САУ записывается в долговременной памяти. К организации данных в ней предъявляются требования надежности хранения, обеспечения быстрого поиска, защиты от ошибок и несанкционированного доступа и др. Сведения в памяти системы организуются в виде баз данных. Базой данных называют совокупность взаимосвязанных массивов, обеспечивающих хранение данных о СУ и ее ВС с такой минимальной избыточностью, которая обеспечивает их оптимальное использование во всех практических случаях, связанных с этой СУ. Выделяют две самостоятельные функции, выполняемые базами данных: образование информационных моделей СУ и ВС, справочная функция. Первая функция заключается в аккумулировании всех необходимых при управлении относительно стабильных сведений об СУ и ВС, которые и составляют неформализованные информационные модели этих элементов. В САУ должна быть возможность дополнения этих моделей и приведения на уровень современности. Справочная функция баз данных состоит в выдаче сведений, необходимых для принятия решений. Они представляются по запросу оператора либо в соответствии с реализуемой программой автоматически. Выделение двух автономных функций позволяет формировать, накапливать и изменять по мере необходимости данные в базах независимо от использующих их программ. Для работы с информацией баз разрабатывается комплекс программных средств, называемый системой управления базами данных (СУБД). Основные функции СУБД: управление получением сведений, их сортировкой, распределением, хранением и защитой; поддержанием данных на уровне современности; выдача справок; объединение и разделение файлов, их копирование и восстановление; защита информации от несанкционированного доступа; устранение ошибок в работе ряд других функций. Обработка информации. Цель обработки информации в САУ - контроль ее достоверности и нахождение концентрированных, сжатых характеристик, обеспечивающих минимальный и в то же время достаточный для принятия решений объем данных. Представление информации оператору. При выдаче данных человеку должна быть обеспечена их полнота и в то же время минимизация до необходимого и достаточного для выработки правильного решения объема. В отображении информации лицу, принимающему решение, основным является удобство восприятия, обеспечивающее простое, без напряжения, быстрое и безошибочное понимание сложившейся в процессе управления ситуации. Трудности при восприятии информации ведут, в конечном счете, к увеличению времени на принятие решения и снижению его эффективности. Комплекс технических и программных средств, выполняющих переработку информации для облегчения задачи управления, называется системой поддержки принятия решений либо просто информационной системой. В СУ информационная система замкнута на человека всегда, и иногда - на технические средства управления. Системы автоматического управления судном, в частности подводным аппаратом можно условно разделить на две группы: основные и вспомогательные. К основным относятся системы автоматического судна по курсу. Примером может служить универсальная авторулевая система производства компании «Навис». Гибкая архитектура позволяет устанавливать данное устройство на различные типы судов, они обеспечивают автоматическую настройку параметров при изменении внешнего воздействия на судно или изменения водоизмещения судна. Это обеспечивает оптимальный режим работы системы без участия оператора, а интуитивный графический интерфейс и небольшое количество кнопок обеспечивает быстрый доступ ко всем функциям системы. Данное устройство повышает безопасность судовождения и экономические расходы топлива в сравнении с ручным методом управления. Примером же вспомогательного средства автоматического управления судном может служить подруливающее устройство. Системы автоматического управления призваны облегчить выполнение задачи управлением судном человеку. Также, стоит отметить, что с помощью автоматизации управления открывается возможность запуска необитаемых подводных аппаратов. Задавая программу в микроконтроллер автоматической системы управлении, открывается возможность исследования с помощью роботизированного подводного аппарата исследовать труднодоступные зоны мирового океана. Это положительно отразиться не только на разведывательной деятельности, но и на изучении экосистемы океан, океанологии, климатологии и т.д. Из САУ наибольшее применение имеют в настоящее время системы автоматического регулирования. Они классифицируются по назначению (для управления судном, станком и т.д.), по виду управляемых величин (курс, скорость и т.д.), по другим признакам, из которых отметим следующие. По виду задающего воздействия выделяют системы: стабилизации, & программного управления, следящие. Системы стабилизации характеризуются неизменностью задающего воздействия. Задача таких систем - поддержание с допустимой ошибкой постоянного значения выходной величины при наличии возмущающих воздействий. В системах программного управления задающее воздействие изменяется по заранее установленному закону. В соответствии с этим законом система изменяет выходную величину. В следящих системах задающее воздействие также величина переменная, но заранее закон его изменения неизвестен. САР подразделяются на линейные и нелинейные. У первых САР зависимость между входом и выходом линейна, т.е. описывается линейными дифференциальными или разностными уравнениями. Работа вторых систем отражается нелинейными дифференциальными или разностными уравнениями. В них имеется один или больше элементов, связь между входом и выходом которых является нелинейной. В зависимости от характера сигналов различают САР непрерывного и дискретного действия. Все сигналы в первых системах являются плавно изменяющимися. У дискретных систем хотя бы одна величина представляет собой дискретный по времени 35 (импульсный) или дискретный по уровню (скачкообразный, релейный) или дискретный по времени и уровню (цифровой) сигнал. По виду управления качеством выделяют САР: без настройки, с ручной настройкой, с частичной адаптацией, адаптивные. У САР без настройки при работе во всем диапазоне условий структура и параметры АУУ неизменны. Система с ручной настройкой дает возможность вручную с помощью специальных органов изменить параметры регулятора для обеспечения требуемого качества управления при изменении влияющих на него условий работы. В САР с частичной адаптацией при изменении одних факторов, влияющих на качество работы системы, используется автоматическая настройка регулятора на оптимальный режим, а других - ручная. Подруливающие устройства При работе с задачами управления c судном, —Судно” приято обозначать как объект управления. Существует два вида средств управлением судна: активные и пассивные. Активные средства самостоятельно вырабатывают силы, прилагаемые к управлению судном, примером может служить подруливающее устройство, о нем пойдет речь далее. Пассивные средства вырабатывают силы, возникающие как реакция на движение судна или руля. Подруливающее устройство является частью рулевого привода, поворачивающий руль в заданное положение Подруливающие устройства имеет широкое распространение. Они предназначены для управления судном в условиях, когда эффективность основных средств управления оказывается недостаточной. Например: при поворотах в условиях, маневрировании на низких скоростях либо при отсутствии хода и в условиях сильного течения. Существует несколько видов подруливающих устройств, которые устанавливаются в зависимости от типа судна, условия размещения, требуемой мощностью и стоимостью. На рисунке 1 представлен внешний вид подруливающего устройства:  Рисунок 1- Внешний вид подруливающего устройства Рассмотрим все виды подруливающих устройств. Виды подруливающих устройств: По месту расположения. По направлению упора По месту выработки струи По типу движителя По типу двигателя По месту положения подруливающие устройства делятся на носовые и кормовые. Наиболее часто встречается только носовые подруливающие устройства. Это объясняется, как правило, трудностью в размещении, поскольку в кормовой части располагаются кормовые винты. Помимо этого у одновинтового судна носовая часть менее управляемая, чем кормовая. По месту расположения различают носовые и кормовые подруливающие устройства. По направлению упора различают поперечные и азимутальные подруливающие устройства. В зависимости от места выработки струи от движителей подруливающие устройства могут быть: туннельными и ствольными. Туннельные устройства имеют широкое применение на гражданских судах. Они включают в себя пульт управления, сквозной поперечный канал ( туннель), движитель, а так же двигатель который обеспечивает движитель энергией. Имеет цилиндрическую форму и находиться ниже ватерлиния. Управление осуществляется дистанционно с пульта в рулевой рубке. Азимутальные подруливающие устройства нашли широкое применение на паромах, баржах, пассажирских лайнерах. Они бывают носовыми и кормовыми. Азимутальные Подруливающие устройства (поворотные винтовые колонки) вначале были применены в системах динамического позиционирования буровых судов, а по истечению определенного времени ими стали оснащаться и другие плавсредства: суда для прокладки трубопроводов и кабелей, землесосы и землечерпалки, буксиры-спасатели и т.д. Нашли азимутальные подруливающие устройства применение и на пассажирских лайнерах, паромах и на других судах, деятельность которых связана с частыми швартовками. Азимутальные устройства могут быть носовыми и кормовыми. Основной недостаток винтовых азимутальных подруливающих устройств состоит в том, что в рабочем состоянии они выступают за пределы корпуса судна. Ряд водопроточных азимутальных ПРУ не имеют этого недостатка, но они менее экономичны. В зависимости от типа двигателя подруливающие устройства бывают дизельные, гидравлические, электрические. Первичным, как правило, служит дизель, он вращает генератор, снабжающий энергией электромотор. Электрические и гидравлические моторы являются вторичными. Следует отметить, что эффективность работы подруливающего устройства резко уменьшается по мере роста скорости хода. Наибольшую эффективность имеют при работе в швартовом режиме, а так же на скорости до 3 узлов, при дальнейшем повышении скорости эффективность использования падает. В современных условиях все большее распространение получает привод, работающий на базе электродвигателя. Поскольку управление выполняется с помощью синтезатора частоты, который работает на базе программируемого процессора, открывается возможность задать многие функции управления подруливающего устройства, написав программу. Приоритет в создании современного блока управления стоит высоко, так как подруливающие устройства приобретают все большее распространение, написание блока управления освободит человека от участия в управлении и сделает спектр обязанностей специалистов более узкопрофильным, контроле и отладке устройства. О реализации создания блока управления и принципах работы электродвигателей и пойдет речь далее. Кроме органов управления на пульте подруливающего устройства расположены средства сигнализации о неполадках в работе устройства. Так в гидравлических устройствах имеется сигнализация о положении подруливающего устройства(поднято, опущено), низком уровне, малом давлении и высокой температуре масла в системе, большой температуре охлаждающей воды. Асинхронный электродвигатель В современной России множество концернов занимает лидирующие мировые позиции в производстве, соответствующих самым современным мировым стандартам, электродвигателей. Широкое использование асинхронных электродвигателей можно объяснить тем, что они достаточно экономичны, просты по исполнению и надежны в работе. Трехфазные асинхронные двигатели активно используются в устройствах автоматики, ,бытовых приборах, медицинском оборудовании, звукозаписывающих установках, а также в системах автоматизации управления объектами, в том числе и судном. Следуя статистическим данным, 75-90 % устанавливаемых на судне электродвигателей применяют для привода разнообразных механизмов и машин. На рисунке 2 представлено изображение асинхронного трехфазного электродвигателя: 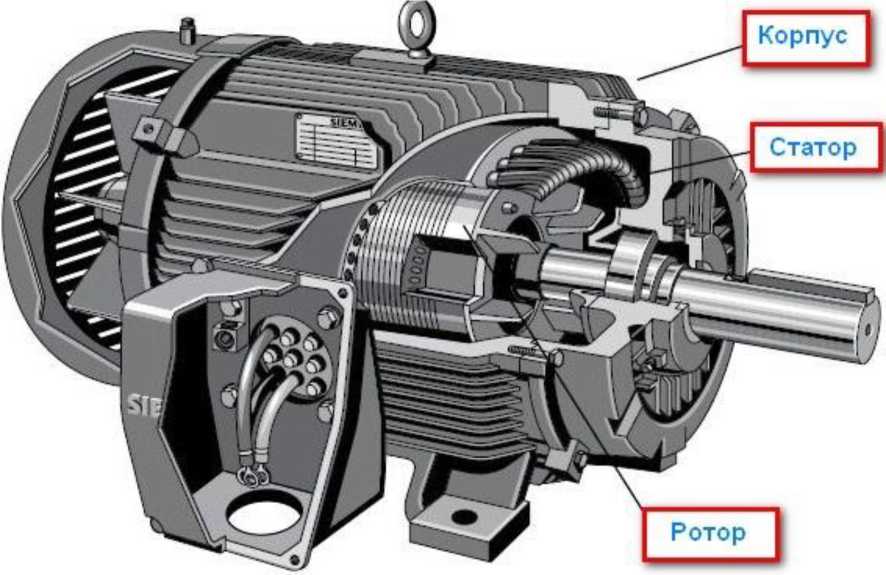 Рисунок 2- Изображение асинхронного трехфазного электродвигателя. В состав асинхронного трехфазного двигателя входят: Статор; Ротор; Обмотка; Корпус. Статор является неподвижной частью двигателя. Внутри статора происходит вращения подвижной части двигателя - ротора. Ротор представляет собой подвижную часть электродвигателя. Ротор состоит из катушки с проволокой плотно обернутой вокруг металлического сердечника. При этом ротор использует только постоянный ток. Как следствие, его магнитной поле всегда протекает исключительно в одной направленности. В пазах статора располагается обмотка. Когда через обмотку проходит трехфазный переменный ток, создается вращающийся магнитной поле. Ток, текущий по проводнику создает магнитное поле вокруг него. Таким образом, принцип действия работы двигателя основывается на создании в обмотке статора вращающегося магнитного поля. Принцип работы судовых электродвигателей абсолютно идентичен другим видам. Однако, существует ряд требований и стандартов, которым судовые электродвигатели должны соответствовать. Прежде всего - это способность работать при периодическом крене до 45°, который возникает при качке судна. Ко всему прочему оборудование должно иметь соответствующую изоляцию, выполненную из влагостойких и теплостойких изоляционных материалов. Существует несколько видов исполнения судовых электродвигателей: Открытое исполнение Брызгозащищенное Водозащищенное Герметические Взрывобезопасные Установка происходит, как правило, в месте защищенным от попадания влаги, масла. Работа электродвигателей может осуществляться в трех режимах: продолжительный; кратковременный; повторно-кратковременный. Электродвигатель, работа которого рассчитана на продолжительную нагрузку, при условии, что нагрузка не превышает предусмотренную в паспорте, может работать фактически бесконечно. Совершенно противоположная ситуация складывается относительно электродвигателя с кратковременным режимом работы. Он может работать без отключения лишь до того момента, который будет указан на щитке электродвигателя. Электродвигатель с повторно-кратковременным режимом свою работы чередует остановками, по своей сути работает в течение любого интервала времени, но с относительной продолжительностью включения указанной в паспортном щитке. Предусмотрено три режима управления: автоматический, ручной и полуавтоматический. При автоматическом управлении импульсы пуска и остановки двигателя подаются автоматически специально настроенными подготовленными устройствами. Роль персонала сводиться к настройке наладке устройств, написания алгоритма работы и последующего контроля за ними. Устройствами служат реле, сенсорно реагирующие на различные изменения давления, уровня воды, температуры и т.д. Автоматическое управление в настоящее время получает все большее распространение. Автоматизируется управление насосами, подача воды, работа холодильных установок, собой целостный организм, связанный воедино бортовым компьютером, управляемым, программируемым и контролируемым экипажем судна. Помимо вышеперечисленного открывается возможность задавать с помощью синтезатора частоты на базе программируемого процессора, задавать программно необходимую частоту и такт работы двигателя. Написание блока управления позволит создать эффективную конфигурацию для работы с необитаемыми подводными аппаратами. Решать самые высокие задачи как и научно-промысловые по исследованию глубин, так и военные с целью деятельности по обнаружению противника и разведки. Ручное управление, напротив, требует от персонала высочайших навыков. В случае некорректных действий возможно обесточивание установки, перегрев пусковых соединений. В следствии этого снижается эффективность работы электродвигателей, поэтому на данный момент происходит тенденция на снижение применения ручного управления. В основном его используют для работы двигателей малой мощности с небольшим количеством пусков и остановок. При помощи релейно-контакторного оборудования происходит полуавтоматическое управление электродвигателем. Персонал, с помощью кнопок управления (командоконтроллеров) размыкает и замыкает цепи питания катушек реле и контакторов. Преимущество полуавтоматического управления в том, что от персоналии не требуется высоких навыков. От оператора не требуется больших усилий помимо этого, имеется возможность управлять двигателей дистанционно. В настоящее время именно этот вид управления электродвигателем имеет самое широкое распространение на судах по всему миру, в том числе и в Российской Федерации. Изучив рынок, можно сделать вывод, что современные Российские электродвигатели на данный момент соответствуют самым высоким мировым стандартам и ни в чем не уступают иностранным аналогам, при значительно меньшей стоимости. Производиться большое количество изделий. В числе лидеров по производству такие концерны как: корпорация РИФ, компания РУСЭЛТ, ОКТБ кристалл и т.д. Принцип работы преобразователя частоты. Преобразователь частоты или инверторная система - это устройство электропривода, преобразующее сетевой однофазный или трехфазный переменный ток частотой до50(60) гц в однофазный или трехфазный ток частотой от 1 Гц до 800 Гц. На рисунке 3 представлен внешний вид преобразователя частоты:  Рисунок 3 - Внешний вид преобразователя частоты Основными функциями преобразователя частоты являются: автоматические и программируемые пуск, остановка и регулирование частоты вращения электродвигателя, разгон и торможение с заданными темпами, автоматическое переключение в режим заданной частоты вращения, сохранение конфигурации управления двигателем, обеспечение защит электродвигателя, автоматический повторный запуск электродвигателя в случае кратковременных сбоев питающей сети. Преобразователь частоты управляется микроконтроллером, на котором выполняется программа. Программа производит управление основными параметрами электродвигателя, который в свою очередь входит в состав привода устройства. Для решения задач регулирования скорости и момента, в основном применяют два метода управления преобразователем частоты : Скалярный метод Векторный метод Скалярный или частотный метод управления заключается в том, чтобы поддерживать постоянным отношение напряжения к частоте (В/Гц) во всем рабочем диапазоне скоростей. Скорость асинхронного двигателя зависит от, установленных напряжения и частоты статора. В следствие этого магнитное поле в зазоре поддерживается нужной величине. Отношение В/Гц при этом не изменяется не зависимо от скорости. Напряжение питания статора при увеличении скорости должно также пропорционально увеличиваться. Однако частоты вращения двигателя не равна частоте вращения вала. Поэтому скалярная система управления не может точно контролировать скорость в случае увеличения нагрузки. Решается данная задача добавлением обратной связи по скорости, а следовательно и компенсации скольжения. Для работы не требуются датчики положения ротора, а скорость оценивается по частоте питающего напряжения. В отличие от векторного управления не требуются высокопроизводительные процессоры. Гораздо более современным и актуальным является векторное управление электродвигателем мощью преобразователя частоты. Данный вид управления позволяет безынерционно контролироваться скорость вращения и момент на валу. Векторное управление в сравнении со скалярным обладает наиболее высокой производительностью, позволяя быстро реагировать на изменение нагрузки, более точно и в увеличенном диапазоне регулировать конфигурации текущей работы двигателя, способствует снижению нагрева и намагничивания, повышает КПД, плавные старт и вращение двигателя во всем диапазоне частот. Из недостатков стоит отметить большую вычислительную сложность и необходимость задания параметров электродвигателя. Суть векторного управления заключается в том, что задается пространственные вектор, который вращается с частотой поля двигателя. На данный момент существует несколько методов векторного управления моментом. Чаще всего методы разделяют на: Линейные (ПИ, ПИД) регуляторы Нелинейные (гестерезисные) регуляторы Линейные регуляторы момента работают в совокупности с широтно- импульсной модуляцией (ШИМ) напряжения. Усредненный необходимый вектор напряжения определяют регуляторы. Окончательно, вектор синтезируется методом ШИМ. По большей части генерируемая, используемой, пространственно-векторной модуляцией (ПВМ). Нелинейные регуляторы предлагают заменить раздельное управление на непрерывное (гистерезисное) управление, которое соответствует идеологии работы (включено-выключено) полупроводниковых устройств инвертора. Все настройки задаются пользователем, что обеспечивает гибкость, вариативность и возможность удобного регулирования в случае необходимости. Имеется возможность задавать программу работы с помощью таких программ как: AVR studio, assembler, c++. Конструктивно, преобразователь частоты выполнен в шкафном исполнении наружного использования. Внутри состоит из схем в составе который тиристор и транзистор, силовой части - преобразователя электрической энергии, управляющий части с микроконтроллером. Современные преобразователи частоты имеют модульную архитектуру. Данная конструкция позволяет изменять и расширять возможности устройства. Дополнять и устанавливать различные интерфейсные модули, расширять каналы ввода и вывода. На рисунке 4, представлена блок-схема преобразователя частоты: 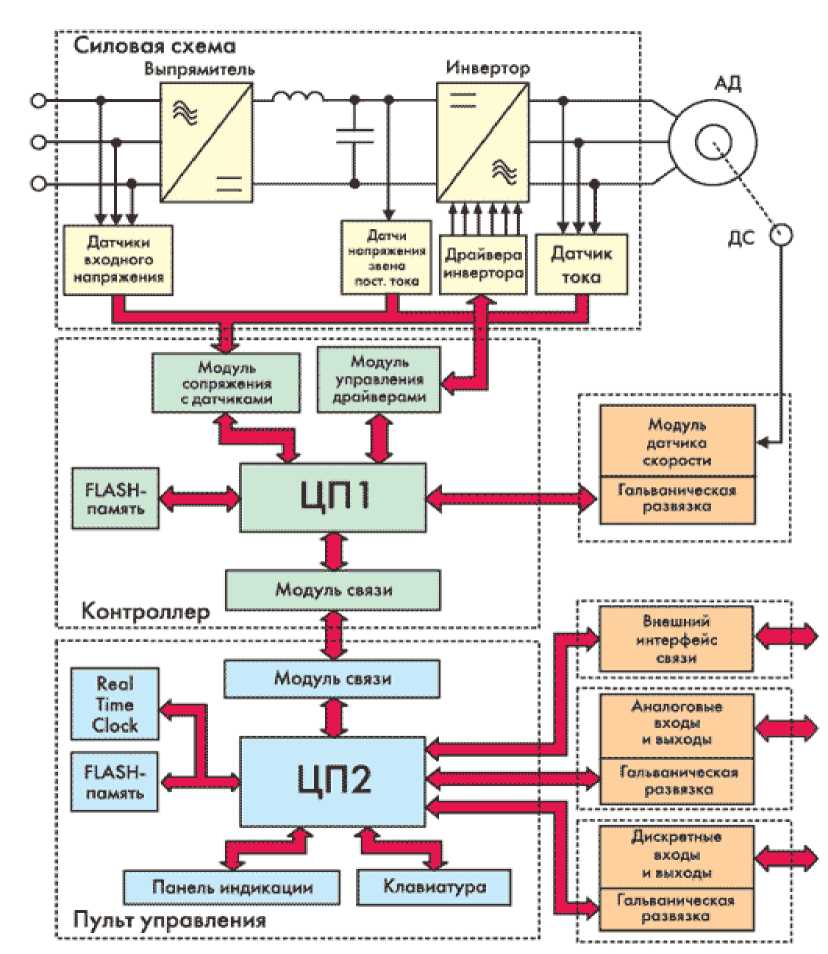 Рисунок 4- блок-схема преобразователя частоты Как правило, преобразователи частоты управляются с помощью пульта управления. Пульт управления располагается на лицевой части преобразователя .Для хранения настроек системы используется flash-память. На рисунке 5 представлена типовая схема преобразователя частоты:       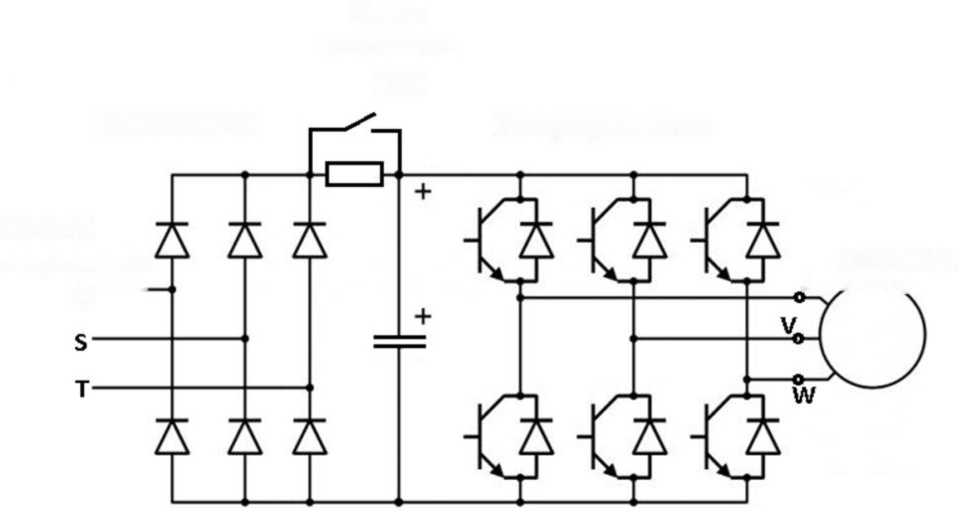 |