Реферат. Государственное учреждение высшего профессионального образования санктпетербургский государственный морской технический университет Факультет морского приборостроения Кафедра гидрофизических средств поиска самостоятельная работа (Реферат)
 Скачать 3 Mb. Скачать 3 Mb.
|

|
Государственное учреждение высшего профессионального образования «САНКТ-ПЕТЕРБУРГСКИЙ ГОСУДАРСТВЕННЫЙ МОРСКОЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ» -  ----------------------------------------------------------------------------------------------- -----------------------------------------------------------------------------------------------Факультет морского приборостроения Кафедра гидрофизических средств поиска САМОСТОЯТЕЛЬНАЯ РАБОТА (Реферат) Вариант 12: Разновидности привязных управляемых по кабелю самоходных подводных аппаратов Выполнил студент гр. 3160_______________________Ротач Никита Витальевич (подпись) (Ф. И. О) Проверил доцент __________________________Розанов Михаил Иванович (подпись) (Ф. И. О) Принято __________ с оценкой ___________________ (дата) (оценка) 2019 г. СОДЕРЖАНИЕ 1.ИСТОРИЯ СОЗДАНИЯ 4 Введение Необитаемые подводные аппараты — одна из наиболее важных и быстропрогрессирующих областей микроробототехники, насчитывающая более 500 различных проектов. Но динамика развития этого направления во многом обусловлена современными электронными технологиями и потребительским спросом. Расположение человека вне погружаемой части в этой разновидности современных технических средств изучения и освоения океана создает ряд преимуществ, среди которых высокая безопасность для обслуживающего персонала, резкое уменьшение габаритов и масс аппаратов в связи с отказом от размещения сложных и связанных с антропометрическими показателями систем жизнеобеспечения, с одной стороны, и интенсивном развитием миниатюризации исследовательских приборов и устройств, что характерно для современного этапа развития техники, с другой стороны.[1] 1.ИСТОРИЯ СОЗДАНИЯ Первым шагом в понимании любой технологии является понимание необходимости ее существования. В случае дистанционно управляемых аппаратов ответ довольно прост. Другого практически удобного, безопасного и экономически целесообразного пути выполнять подводные манипуляции не существует. История свидетельствует, что люди делали многое от сбора пищи до подъема пушек со дна и другого под водой еще несколько столетий назад. Первые попытки улучшить возможность пребывания под водой были зафиксированы в середине 16го столетия, когда был впервые использован первый «шлем» для погружения. Рисунок этого аппарата свидетельствует, что это была намасленная кожаная сумка с выведенной на поверхность трубой. От этой старинной технологии до рекордного погружения на 2,250 футов, воспроизведенного в Университете Дюка в 1981 году, мы были свидетелями невероятного развития человеческой способности работать под водой. Погружения в открытое море были совершены до 2 тысяч футов, а коммерческие погружения до 1 750 футов, однако эти примеры очень редки, несут в себе большую опасность и экономически не выгодны. Аппараты, управляемые человеком (human occupied vehicles, HOV), ранее называемые обитаемый погружной аппарат, явились решением для покорения глубины только на короткий период. Проблема состояла в том, что они несли в себе те же недостатки, что и гипербарическое погружение. В период между серединой 1960х и серединой 1970х казалось, что HOV позволят проводить работы в более глубоких местах и в течение более длительных периодов времени. Проблемой же было то, что для работы HOV необходимы были крупные специализированные суда поддержки, а также все еще существовал риск для человека при работе на глубине. Также HOV были медленны при запуске и поднятии, время пребывания на глубине было ограниче6но, что делало их использование экономически невыгодным. Начало коммерческого использования ROV- дистанционно управляемые аппараты (remotely operated vehicles, ROV) в середине 70х годов вытеснило HOV из широкомасштабного использования в науке и туризме. До сих пор остается неясным, кто является разработчиком первого ROV. Однако, существуют два возможных кандидата. Программируемый подводный аппарат (programmed underwater vehicle, PUV) представлял собой торпеду, разработанную Luppis-Whitehead Automobile в Австрии в 1864 году, но первый ROV, названный POODLE, был разработан Дмитрием Ребиковым в 1953 году. Военным силам США приписывают развитие данной технологии до ее операционного использования во время попыток разработать роботов для поднятия подводного вооружения, потерянного во время морских тестов. Слава ROV возросла, когда с помощью систем CURV (Cable controlled underwater recovery vehicle, погружной спасательный аппарат, управляемый по проводам), принадлежащие вооружению США, была поднята со дна моря атомная бомба, потерянная в районе вод Испании во время авиакатастрофы в 1966 году, а затем были спасены пилоты затонувшего погружного аппарата Pisces в море недалеко от г. Корк, Ирландия в 1973 году, тогда как в аппарате оставались лишь считанные минуты кислорода для дыхания. Следующий шаг развития технологии был выполнен коммерческими фирмами, которые видели будущее за ROV в поддержке оффшорной добычи нефти. Переход от военного использования к применению в коммерческом мире был довольно быстрым. Производственные компании, такие как International Submarine Engineering в Британской Колумбии, Perry Oceanographic в Ривьера Бич, Флорида, и Hydro Products and Ametek Strata в Сан Диего, Калифорния были одними из первых среди фирм, начавших коммерческую деятельность на основе работ, выполняемых для военных. Коммерческие компании, такие как Seaway (небольшая компания в Норвегии), Martech (небольшая независимая компания в Мексиканском заливе), TaylorDivingandSalvage (дочерняя компания Halliburton) стремились расширить свои возможности с использованием этой новой технологии. Часто случалось, что нужно было использовать технологию с осторожностью. Заводские приемочные и ходовые испытания, рассчитанные лишь на несколько дней, часто становились тяжелой работой, которая длилась неделями. Уже на месте работы, операторы были рады получить аппарат обратно и были еще более рады, если удавалось использовать аппарат в течение более 4х часов в сутки. Некоторые из тех, кто пережил эти первые долгие дни работы, например, Дрю Микель, Вейд Абади, Кевин Петерсон и Чарльз Ройс, все еще живы. С этого не вселяющего надежду начала технология и отрасль значительно развились к сегодняшнему дню. [2] 2.ОПИСАНИЕ И КЛАССИФИКАЦИЯ АППАРАТОВ ROV При всем разнообразии самоходных НПА (по целевому назначению, массогабаритным характеристикам, конструктивному облику, типу энергосиловой установки и т.д. и т.п.) общепризнанной классификации в этом классе робототехники еще не сложилось. Поэтому в зарубежных публикациях, посвященных анализу состояния и прогнозу развития НПА, приводятся достаточно противоречивые факты и статистические сведения. Обзор отечественных и зарубежных публикаций в области подводной техники позволил сформулировать наиболее общее и непротиворечивое условное деление самоходных НПА (рис.1). 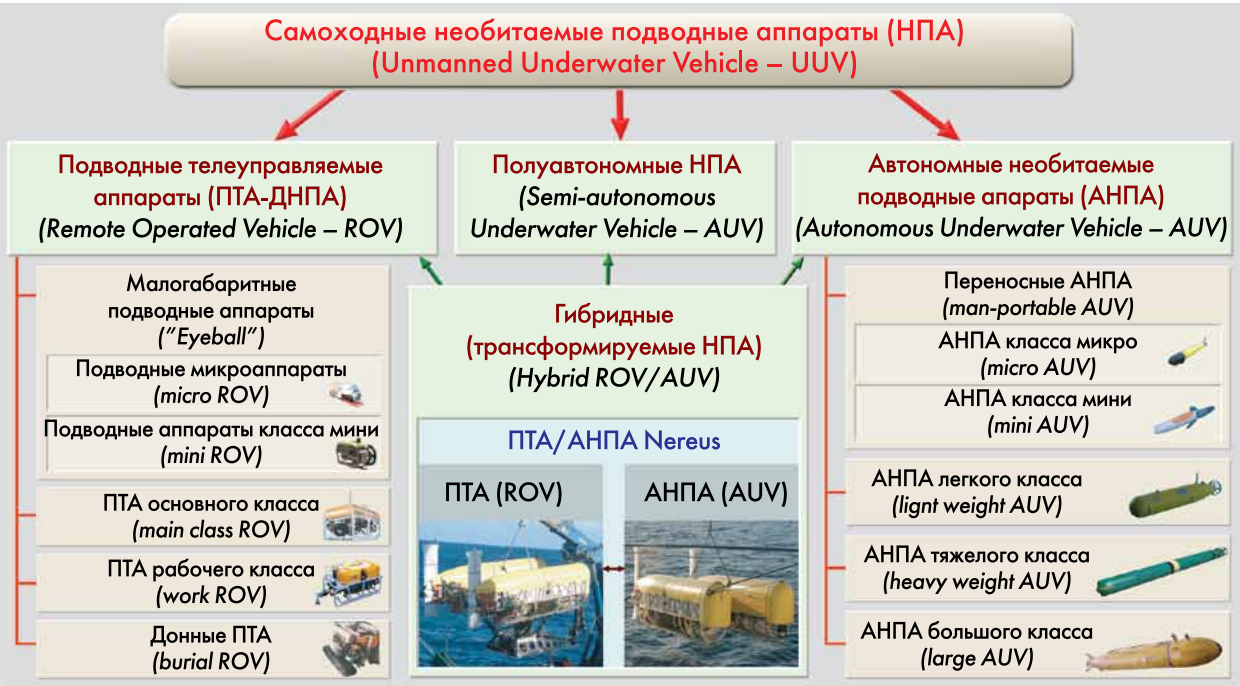 Рис. 1 Условная классификация самоходных НПА (АНПА – по программам ВМС США) Все самоходные НПА (UUV – Unmanned Underwater Vehicle) разделяют на два больших подкласса: неавтономные (привязные) НПА и автономные необитаемые подводные аппараты (АНПА). К неавтономным НПА относят буксируемые и самоходные привязные подводные аппараты. Далее в классе неавтономных НПА будут рассматриваться только самоходные аппараты (аппараты с движительной системой). 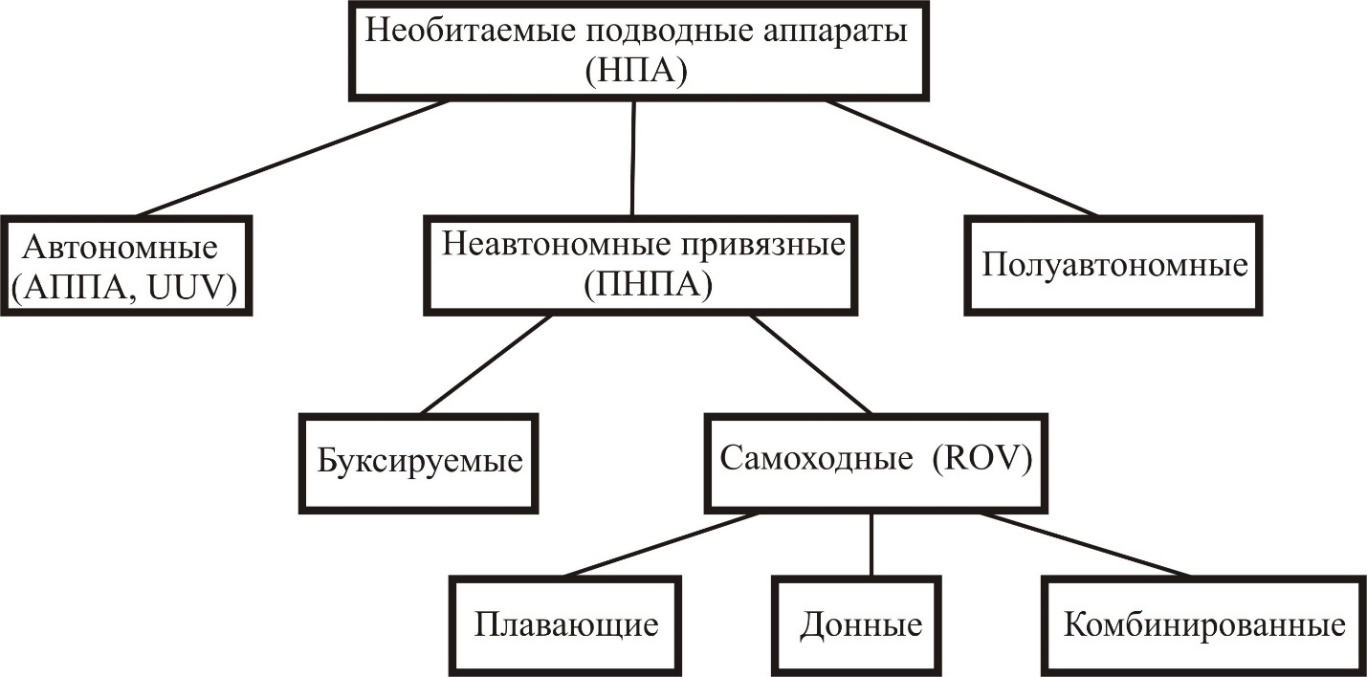 Рис. 2 Классификация необитаемых подводных аппаратов. Неавтономные НПА с движительной установкой (самоходные неавтономные НПА) за рубежом называют дистанционно-управляемые аппараты (Remote Operated Vehicle – ROV или ДНПА). В отечественной литературе эти аппараты наиболее часто называют подводными телеуправляемыми аппаратами (ПТА). Причем для отнесения аппарата к этому классу принципиально наличие проводного канала энергообеспечения и телеуправления (кабель-связки). Самоходные НПА могут быть плавающими в толще воды, самоходными донными или с комбинированным типом движения. К автономным необитаемым подводным аппаратам (АНПА) относятся самоходные НПА с автономной системой энергообеспечения и, как правило, беспроводным каналом телеуправления и связи. НПА с автономной системой энергообеспечения, но с проводным каналом управления и связи (обычно на основе волоконно-оптической линии связи), составляют класс полуавтономных аппаратов. Примером такого полуавтономного НПА может служить аппарат проекта NMRS (Nearterm Mine Reconnaissance System), разработанный компанией Northrop Grumman по заказу ВМС США. Надо отметить, что деление НПА по признаку автономности сформировалось в процессе эволюции этого вида техники, и под автономностью понимается, прежде всего, энергетическая независимость аппарата от судна-носителя. Таким образом, телеуправляемыми могут быть как автономные, так и неавтономные аппараты. Самоходные НПА уже сформировались в достаточно представительный класс робототехнических средств, насчитывающий свыше 500 различных проектов (моделей). К 2009 году за рубежом было создано более 7500 неавтономных НПА. В разработке и производстве самоходных НПА лидируют США, Великобритания, Канада, Франция, Германия и Япония. Неавтономные НПА По целевому назначению и особенностям технического оснащения неавтономные НПА разделяют на несколько классов (рис.3, 4). 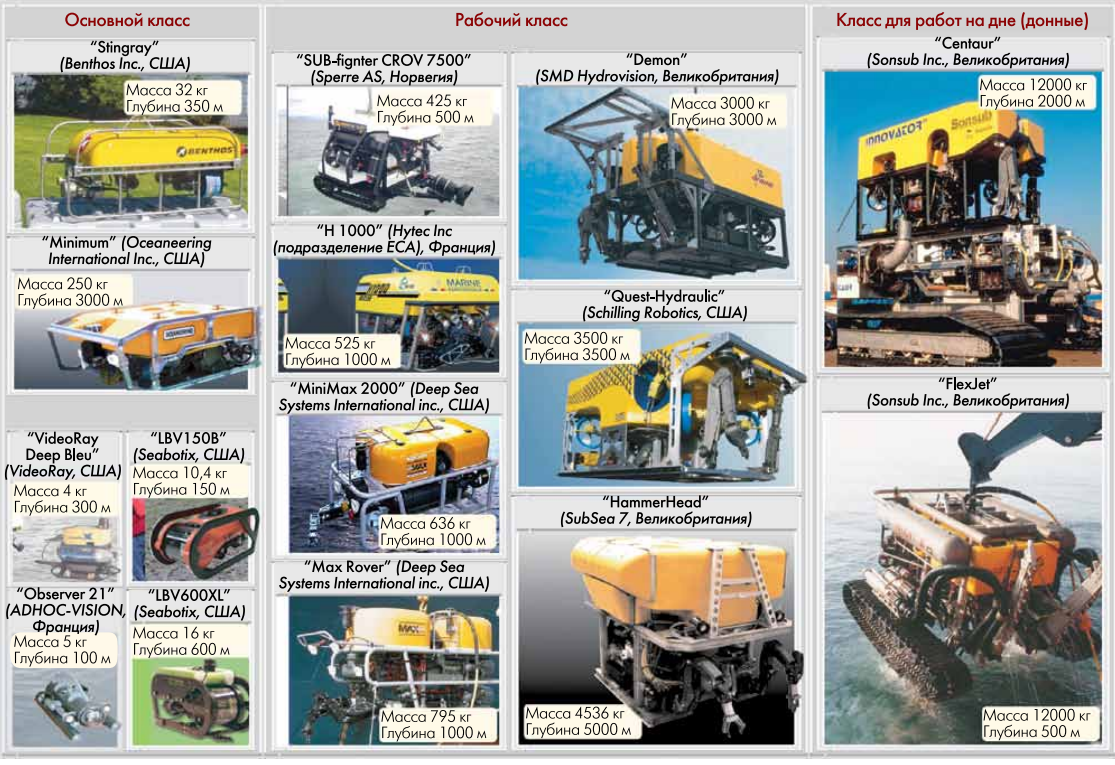 Рис. 3 Внешний вид современных неавтономных НПА различных классов 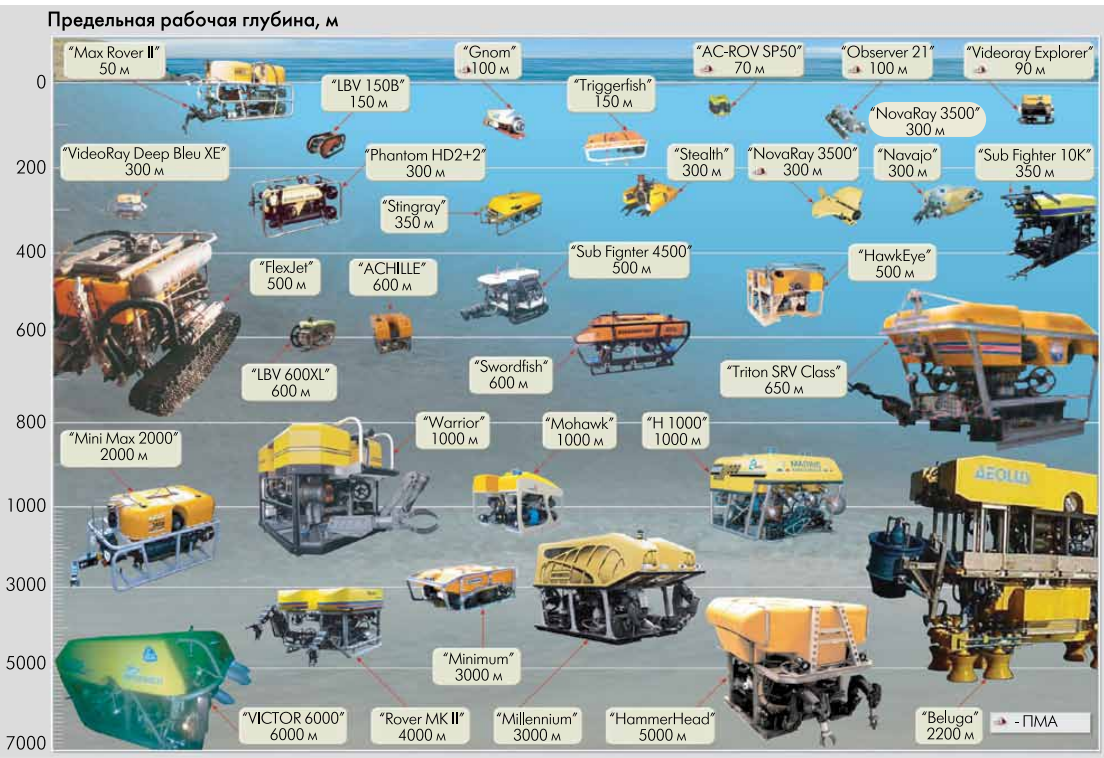 Рис. 4 Характеристика распределения современных проектов неавтономных НПА по предельным рабочим глубинам Разделение неавтономных НПА на микро и мини уже давно используется в зарубежной литературе. Однако такая классификация не имеет четких границ, а потому не однозначна. Аппараты этих классов можно отнести к изделиям микросистемной техники, сформировавшимся в результате миниатюризации всех систем необитаемых подводных аппаратов (НПА). Поэтому остановимся на следующей условной классификации неавтономных НПА по массе аппарата: микро (масса менее <5 кг), мини (масса 5–30 кг), легкие (30–500 кг), средние (500–5000 кг) и тяжелые (более 5000 кг). Класс подводных микроаппаратов (ПМА, micro ROV) сформировался относительно недавно и объединяет аппараты массой не более 5 кг. Как, правило, ПМА предназначены для выполнения обзорно-поисковых работ на глубинах до 100–150 м. Подводные малогабаритные аппараты (mini ROV) – это самоходные НПА с массой от 5 до 30 кг. Аппараты основного класса предназначены для решения поисковых, инспекционных и осмотровых задач, выполнения легких механических работ в толще воды и проведения измерений параметров водной среды. Их типовые характеристики: максимальная рабочая глубина – до 3000 м (в большинстве проектов – до 1000 м); радиус действия (максимальное удаление от обеспечивающего судна) – 100–150 м (в редких случаях до 1000 м); скорость подводного хода – 1–2,5 узла, масса – от 20 до 350 кг. Аппараты рабочего класса предназначены для решения широкого круга подводно-технических работ (аварийно-спасательных, поисковых, инженерно-строительных и ремонтных). Этот класс составляют НПА массой от 30 до 6000 кг с достаточно сложным навесным оборудованием. Как правило, стоимость тяжелых аппаратов рабочего класса составляет 1–3 млн. долл. Объем производства аппаратов рабочего класса массой более 500 кг невысок – не более 60 изделий в год (без учета НПА военного назначения). Донные НПА – это аппараты на гусеничном ходу, предназначенные для тяжелых механических работ на морском дне. В мире насчитывается не более 65–70 НПА этого класса. Наибольшее распространение в классе неавтономных НПА получили малогабаритные осмотровые аппараты, именуемые в зарубежной литературе "Eyeball ROV". Типовая стоимость этих аппаратов – 10–50 тыс. долл. В 2008 году было произведено 1200–1300 таких аппаратов, всего к началу 2009 года в мире их было выпущено свыше 4000. Среди неавтономных НПА аппараты класса микро составляют менее 3–4% (табл.1). Однако объем их продаж из года в год стремительно растет. Лидером в объемах серийно выпускаемых ПМА является компания VideoRay (США), поставившая на мировой рынок более 1200 комплексов. Лидирующие позиции занимает и канадская фирма Inuktun. Выделим шесть коммерчески доступных на мировом рынке проектов ПМА (рис.5–10). ПМА серии VideoRay, разработанные компанией VideoRay (США) (рис.5.), продаются в шести различных комплектациях стоимостью от 6 до 46 тыс. долл. ПМА серии LBV 150/300 (рис.6) (компании) SeaBotix (США) имеют массу 11–13 кг в зависимости от комплектации и рабочей глубины. Стоимость комплексов этих ПМА колеблется от 13 до 40 тыс. долл. Отметим ПМА серии "ГНОМ" (рис.9) (масса 2–7 кг), разработанный Институтом океанологии им. П.П.Ширшова РАН совместно с ООО "Индэл". Аппарат предназначен для проведения подводных осмотровых работ на глубинах до 80–150 м. В зависимости от состава бортовых датчиков стоимость комплекса ПМА колеблется в пределах 4–8 тыс. долл. Практически точной копией этого аппарата является ПМА "GNOM" (рис.10), производимый чилийской компанией Mariscope Chilena (филиал немецкой компании Mariscope). Достоинства неавтономных НПА по сравнению с АНПА: - большая продолжительность непрерывной работы (энергоснабжение этих аппаратов осуществляется либо с борта обеспечивающего судна, либо при помощи берегового оборудования); - возможность выполнения сложных и тяжелых механических работ в толще воды и на донной поверхности; - относительно низкая стоимость постройки и эксплуатации (существенно меньшая сложность конструкции по сравнению с АНПА одного и того же класса); - относительно высокая надежность конструкции (практически нет риска невозвращения аппарата). Наряду с достоинствами, неавтономные НПА обладают и рядом недостатков, основные из которых: - полная зависимость аппарата от обеспечивающего судна или берегового надводного оборудования; - радиус действия аппарата ограничен длиной кабеля-связки; - на борту обеспечивающего судна необходимо устройство управления натяжением кабеля-связки (во время волнения моря); - сложность управления аппаратом в условиях сильных течений, завалов и узкостей. Эти недостатки, а также достижения в области энергетики, электроники и информационных технологий послужили мощным стимулом к стремительному развитию НПА автономного класса. [3] 3. МЕТОДЫ И СРЕДСТВА ПОЛУЧЕНИЯ ИМИ ИНФОРМАЦИИ ТНПА используются для картографии грунта, осмотровых работ, для спасательных операций, для остропки и извлечения крупных предметов со дна, для работ по обеспечиванию объектов нефтегазового комплекса (поддержка бурения, инспекция трасс газопроводов, осмотр структур на наличие поломок, выполнение операций с вентилями и задвижками), для операций по разминированию, для научных приложений, для поддержки водолазных работ, для работ по поддержанию рыбных ферм, для археологических изысканий, для осмотра городских коммуникаций, для осмотра судов на наличие взрывчатых устройств или контрабандных товаров, прикреплённых снаружи к борту и др. Круг решаемых задач постоянно расширяется, и парк аппаратов стремительно растёт. Работа аппаратом намного дешевле дорогостоящих водолазных работ несмотря на то, что первоначальные вложения достаточно велики, хотя работа аппаратом не может заменить весь спектр водолазных работ. [4] Оборудование аппаратов Стандартно аппарат имеет следующее оборудование: - Двигатели (от трёх до десяти и более) - Датчик давления - Компас или гирокомпас для ориентирования в пространстве - Видеокамеры - Осветительное оборудование - Манипулятор - Гидролокатор кругового обзора - Маяк ответчик ГАНС (гидроакустическая навигационная система) В аппаратах массой менее 50 кг, используемых для осмотровых целей часто отсутствует манипулятор и гидролокатор, бывают и другие упрощения. В аппаратах рабочего класса и аппаратах для осмотра с возможностью добавочного оборудования (так называемый класс II по NORSOK U-102) может использоваться следующее оборудование: -Гидравлический модуль -Гидравлические манипуляторы способные поднимать более 100 кг -Гидравлический тросорез -Дисковый тросорез -Трассоискатель -Осмотровой модуль для трубопровода -Многолучевой эхолот -Щётка для чистки конструкций -Очистные устройства на принципе гидроструйной очистки -Модуль остропки ТПА в основном используются в нефтяной промышленности . Работы по техническому обслуживанию, инспекция и другие работы в акватории сейчас в основном осуществляются путем ДУ вместо водолазов или пилотируемых аппаратов. Это позволяет нырять на большую глубину и работать под водой дольше, чем это было бы возможно с дайверами. По сравнению с пилотируемыми лодками они не только более безопасны, но и, в частности, дешевле в использовании, потому что, например, отказ от систем жизнеобеспечения позволяет лучше использовать пространство. Помимо промышленного использования, ROV также используются для научных исследований в морских глубинах . Благодаря возможности использования в воде на глубине до нескольких тысяч метров, экосистемы и структуры на морском дне могут быть исследованы и взяты образцы. Научные натурные эксперименты на морском дне также можно проводить с помощью подводных аппаратов с проводом. ROV управляется со станции управления на борту исследовательского корабля и передает видеоизображения высокого разрешения в реальном времени на борт корабля. В то время как ROV (с кабельным соединением, англ. Umbilical , буквально umbilical) подключаются к передаче энергии и информации на надводное судно, приходят автономные подводные аппараты (AUV) без такого кабельного соединения и с ним хранят энергию в аккумуляторах . Оба решения имеют свои преимущества и недостатки и служат разным целям. Снаружи ТПА и АПА легко отличить. ТНПА в основном представляют собой рамы или строительные леса, которые оснащены различными компонентами и несут большое количество гребных винтов ( подруливающих устройств ) для маневрирования во всех направлениях. Напротив, АПА должны экономно расходовать свою энергию привода и поэтому имеют внешнюю обшивку с низким сопротивлением, как у подводных лодок или торпед . Например, АНПА запускаются исследовательскими судами в Мировой океан и запрограммированы на погружение в глубины для сбора научных или исследовательских данных. Через заданное время они снова появляются и передают эти данные на исследовательскую станцию через спутник. Цикл сбора данных повторяется до тех пор, пока АПА не завершит работу и снова не будет "захвачен". ТНПА доступны во многих различных конструкциях и классах, например, ТНПА Micro, Мини ТНПА, ТНПА рабочего класса, Многоцелевые ТНПА (многофункциональные) и Траншеекопатели (промывка траншей для прокладки подводных кабелей). Меньшие ROV в основном являются чисто электрическими, а большие - с электрогидравлическим приводом. Micro ROV весит от 1,5 кг, включая камеры, приводы и фонари. Траншейные системы могут весить до 20 тонн. Другой пример ROV эксплуатируется голландской земснарядной компанией Boskalis . Грейферы, оснащенные гребными винтами, для выемки большей площади на морское дно без необходимости перемещать судно (цель: защитить морские системы от айсбергов, которые волочатся по земле). Этот пример проясняет, что АПА не обязательно может рассматриваться как лучшая альтернатива ROV из-за их вариантов условного вмешательства. [5] Выводы 1. ROV- это дистанционно управляемые аппараты. Все самоходные НПА разделяют на два больших подкласса: неавтономные (привязные) НПА и автономные необитаемые подводные аппараты (АНПА). К неавтономным НПА относят буксируемые и самоходные привязные подводные аппараты. Достоинства неавтономных НПА по сравнению с АНПА: - большая продолжительность непрерывной работы; - возможность выполнения сложных и тяжелых механических работ в толще воды и на донной поверхности; - относительно низкая стоимость постройки и эксплуатации; - относительно высокая надежность конструкции. Наряду с достоинствами, неавтономные НПА обладают и рядом недостатков, основные из которых: - полная зависимость аппарата от обеспечивающего судна или берегового надводного оборудования; - радиус действия аппарата ограничен длиной кабеля-связки; - на борту обеспечивающего судна необходимо устройство управления натяжением кабеля-связки; - сложность управления аппаратом в условиях сильных течений, завалов и узкостей. Список источников информации https://moluch.ru/archive/130/35877/ https://maritime-zone.com/news/view/2009-04-16-rovs https://www.electronics.ru/journal/article/286 https://ru.wikipedia.org/wiki/Телеуправляемый_необитаемый_подводный_аппарат https://deru.abcdef.wiki/wiki/Ferngesteuertes_Unterwasserfahrzeug |