теория об автоматике курсы ПП. 2. Теория к КПП. Греч.аутоматос самодействующий
 Скачать 0.53 Mb. Скачать 0.53 Mb.
|

|
Автомат (греч.—«аутоматос» — самодействующий) — это устройство, осуществляющее некоторый процесс без непосредственного участия человека. Появление первых автоматов относится к глубокой древности — это были часы и механические игрушки, которым придавали форму человека или животного. Известен автомат в виде летающего голубя (грек Архитас — современник Платона), автоматы в виде водяных часов, торговый автомат, движущиеся статуи (Герои Александрийский). В средние века были созданы андроиды — механические существа, копирующие человека. В этой области в XVIII в. особенно прославились Пьер и Анри Дро — швейцарские часовщики и французский механик Жак Вокансон. Известна жестяная утка Вокансона, состоявшая из тысяч деталей, которая могла летать, которую невозможно было отличить от живой утки (вплоть до процессов пищеварения). Свидетельства об этой утке содержатся в воспоминаниях Канта, Гегеля, Лейбница и других выдающихся мыслителей того времени. Со второй половины XVIII в. начинается применение автоматов в промышленности. Это было связано с паровыми машинами. Первый промышленный регулятор для паровых машин был создан русским изобретателем И. И. Ползуновым. Его изобретение пролежало под сукном долгое время. По этой причине считается, что первый промышленный регулятор был создан Джеймсом Уаттом в 1784 г. До недавнего времени автоматы строили, чтобы заменить человека при выполнении физически тяжелой и опасной работы. В 1940-х гг. появились автоматы, выполняющие некоторые виды умственного труда: управляющие, аналоговые и цифровые вычислительные машины — УВМ, АВМ, ЦВМ. Применение автоматов повысило производительность труда, точность и скорость выполнения производственных операций. Автоматы используются для освобождения человека от утомительного и однообразного труда, от вредных и опасных условий работы. Автоматы — основа технологического прогресса. В 1957 г. появился первый промышленный робот — фирмы Unima- tion (США). Название Unimation происходит от «Universal Automation» — универсальная автоматизация. Через 10 лет инициативу в области робототехники перехватила Япония, и с тех пор она является ведущей страной в этой области. Термин «робот» появился в 1920 г., придумал его чешский писатель Карел Чапек (происходит от чешского слова «робота» — работа). В настоящее время роботы все шире начинают применяться в различных областях промышленного производства: в машиностроении — при раскраске автомобилей, резке металла на автозаводских конвейерах; в строительном производстве — при роботизации и автоматизации земляных работ, при роботизации установки и монтажа строительных блоков и элементов, при автоматизации и роботизации бетонных работ, в роботизированных комплексах для отделочных работ, при автоматизации и роботизации работ в подземном строительстве, при роботизации строительных операций. Применяются роботы также и в военном деле. XXI век — это эпоха расцвета автоматики, тотального проникновения автоматики в жизнь человеческого общества. Мы уже не мыслим себя без компьютеров, мобильных телефонов, контроллеров, микропроцессоров. Все это стало возможным в результате бурного, революционного развития электроники и микроэлектроники с начала 1980-х гг. Устройства автоматики решают следующие важнейшие задачи: автоматического контроля технологических параметров, автоматического регулирования и автоматического управления процессами, технологической сигнализации, диспетчеризации, роботизации. В настоящем курсе лекций наибольшее внимание обращено на автоматический контроль технологических параметров, теорию автоматического регулирования (ТАР), являющуюся теоретической основой автоматики, и на автоматизацию процессов в производстве стройматериалов. Автоматизация. Начало. Что и почему. Люди давно мечтали облегчить свою жизнь переложив труд на плечи других людей, животных, машин. Сейчас возможность использовать "железных помошников" велика, как никогда ранее. Причем это не только роботы, в быту их пока очень мало, но и различные средства автоматизации и дистанционного управления. Вот об автоматизации и поговорим. Нет, я не буду пересказывать ТАУ (теорию автоматического управления) и приводить громоздкие формулы. Самые сложные понятия можно объяснить просто и наглядно. Если вы не профессиональный разработчик, то этого будет достаточно. А профессионалы и так все знают. Устройства автоматики могут быть простыми, например, автоматическое включение освещения при наступлении темноты, или сложными, например, 3D-принтер (да, это тоже автоматика). Могут управлять простыми процессами, например, набор воды в бак для полива теплицы, или сложными, например, управлением двигателем внутреннего сгорания. Причем сложность управляемого процесса и сложность управляющего устройства не всегда взаимосвязаны. Приведу один провокационный пример - управление потоком электронов и электромагнитным полем в длинных металлических линиях. Сложно звучит? На самом деле это может быть простое включение/выключение лампочки. И средство управление простое - выключатель (или простое замыкание двух проводов. Извиняюсь на такой "грубый прием", но с точки зрения физики — это именно управление потоком электронов в металлах. Другим примером, уже честным, может быть управление температурой муфельной печи. Вроде бы просто, достигли нужной температуры - выключили нагрев, остыли - включили нагрев. Почти как регулировка температуры утюга с помощью биметаллической пластины. На самом деле с печью все гораздо сложнее, если учитывать ее тепловую инерцию. И система управления получается довольно сложной. Но об этом позже. К автоматическому управлению, с некоторой натяжкой, можно отнести и дистанционное управление. Например, переключение каналов на телевизоре с помощью пульта дистанционного управления. Да, это тоже автоматика, хоть и с участием человека. Это тоже станет понятно из дальнейшего разговора. Когда то, уже давно, новички начинали освоение автоматики повторяя готовые схемы, например, из журналов и книг. Работающее устройство получалось не всегда, что или отбивало интерес к теме, или побуждало вникать в суть и разбираться. Сейчас зачастую бывает достаточно приобрести готовые модули/конструкторы, что-то вроде Arduino, найти готовые скетчи. Но точно так же, рабочее устройство получается не всегда. Кто-то бросает начатое. Кто-то не хочет разбираться, но хочет получить рабочее устройство и штурмует форумы в поисках готовых советов и решений, или новых скетчей. Но кто то, как и раньше, пытается разобраться и понять. Именно на новичков, стремящихся разобраться и понять и рассчитана эта статья. Что такое автоматическое управление и система автоматического управления Это изменение параметров объекта управления в ответ на изменение его состояния, причем, в идеале, без участия человека. А с участием человека получаем, как вариант, дистанционное управление. Сложно? Сейчас поясню примером. Возьмем, в качестве объекта управления, совершенно утилитарный предмет - электрический утюг. Изменением состояния утюга будем считать изменение его температуры. А изменяемым параметром утюга будем считать включен/выключен. Система управления должна поддерживать температуру утюга. Отслеживая «состояние», мы реагируем, изменяя "параметр", то есть, отслеживая температуру мы включаем утюг при его остывании и выключаем при перегреве. А включение/выключение, в свою очередь, приводит к изменению "состояния", то есть, температуры. Получаем замкнутую петлю управления. Теперь немного понятнее, не так ли? Система автоматического управления должна: 1. Иметь представление о том, как функционирует объект управления и как им управлять. 2. Получать доступную информацию и состоянии объекта управления. 3. Изменять доступные параметры объекта управления (управляемые параметры). Представление о функционирование объекта управления и способах управления обычно называется моделью, точнее, математической моделью. Модель, хоть и называется математической, не обязательно состоит из формул. По крайней мере, внешне. Часто это набор простых правил, которые составляют алгоритм управления. Конечно, внутри модель состоит именно из формул, так как физические, химические, механические, и прочие процессы описываются именно математическими формулами. Но непрофессионалы, обычно, имеют дело уже с моделью изложенной языком алгоритмов. Хотя знания математики, физики, химии, причем глубокого, избежать получается далеко не всегда. Модель, или алгоритм, могут отрабатываться: - Микроконтроллером, или даже большой ЭВМ. - Электронной схемой на дискретной логике. - Аналоговой электронной схемой. - Электромеханическим, или чисто механическим, устройством. - Человеком. Обычно, это называют устройством управления, или УУ. Да, человек может быть устройством управления! Вам стало темно читать, нужно встать и включить свет - алгоритм управления выполнен человеком. Информацию о состоянии объекта управления устройство управления получает от датчиков. Зачастую датчики к устройству управления подключаются не напрямую, а через устройства связи с объектом, по другому называемому УСО. УСО не всегда видно явно, даже если оно присутствует. Например, УСО можно считать микросхему расширения портов ввода-вывода которая подключена к микроконтроллеру через I2C. Сами датчики бывают очень разные, и об этом я поговорю чуть позже. Само управление объектом осуществляется исполнительными устройствами. Например, насос может подавать воду в бак. Система управления изменяет параметры объекта включая,выключая исполнительные устройства. Или плавно регулируя напряжение/ток для исполнительных устройств. Точно так же, как и датчики, управление исполнительными устройствами часто осуществляется через УСО. 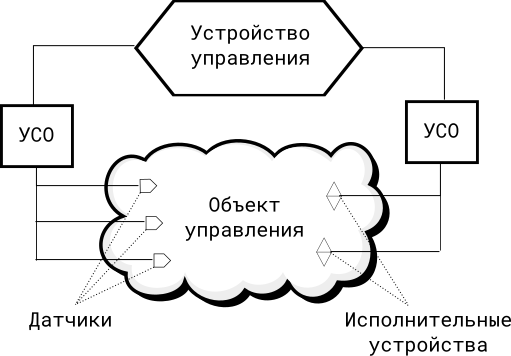 Система автоматизированного управления. Иллюстрация моя. Система автоматизированного управления. Иллюстрация моя.Вот так можно условно изобразить систему автоматического управления в общем виде. Не все компоненты присутствуют в каждой системе. Некоторые компоненты могут, на первый взгляд, объединяться в один узел. Б 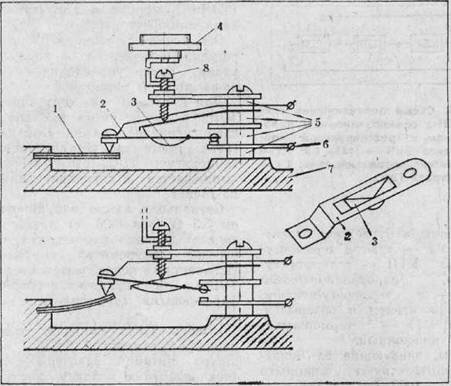 иметаллический регулятор температуры утюга. Изображение с сайта electrodim.ru иметаллический регулятор температуры утюга. Изображение с сайта electrodim.ruНапример, возьмем все тот же утюг. Объект управления это сам утюг, точнее, его подошва которой гладят. Биметаллическая пластина с контактом, на первый взгляд, выглядит как три в одном - датчик, устройство управления, и исполнительное устройство. Однако посмотрим внимательнее. Биметаллическая пластина действительно является датчиком, она изгибается при нагреве (чем выше температура, тем больше изгиб). Однако устройством управления является регулятор температуры, который задает расстояние между подвижным контактом и неподвижным контактом. Это тот самый диск с условными символами температуры, который мы крутим (на самом деле там не такой простой механизм). Чем выше должна быть температура, тем больше должно быть расстояние между контактами. А исполнительными механизмом является нагревательный элемент. Взаимодействие с ним идет через устройство сопряжения с объектов состоящее из двух контактов. Подвижного и неподвижного. Теперь рассмотрим каждый компонент системы управления более подробно. Начнем с датчиков. Датчики Датчики обеспечивают сбор информации о состоянии объекта управления. На основании данных с датчиков для модели в устройстве управления формируются значения переменных состояния объекта. Сами датчики можно разделить на несколько категорий по разным признакам - функциональному, способу (принципу) измерения, типу выходного сигнала, и так далее. Давайте разбираться. По функциональному признаку деление датчиков самое очевидное. Например, бывают датчики температуры, датчики давления, датчики влажности, датчики освещенности, и так далее. Подробно останавливаться на этом не будет, тут нет ничего особенного. А вот дальше будет интереснее. Датчики могут измерять состояние объекта напрямую, или косвенно. Немного забегу вперед, что бы пояснить суть этих слов. Например, датчик изменяет свое сопротивление при изменении температуры, что позволяет эту температуру измерить. С одной стороны, это косвенный способ измерения, так как мы будем измерять сопротивление, а не температуру напрямую. Однако считается, что это датчик непосредственного измерения температуры. Но если нам нужно измерить скорость потока воздуха и мы используем для этого измерение температуры, то получаем косвенное измерение. Как такое косвенное измерение происходит? Мы нагреваем измерительный датчик и обдуваем его потоком воздуха. Если температура воздуха меньше температуры датчика датчик будет охлаждаться. Причем тем сильнее, чем выше скорость потока. Измерив насколько снизилась температура датчика мы можем сделать выводы о скорости потока воздуха. Разумеется, нам нужно еще знать температуру воздуха, для чего потребуется второй датчик температуры. А если мы измеряем скорость потока в трубе известного диаметра, то ты можем оценить и объем, и массу воздуха, прошедшего за заданное время. Ничего не напоминает? Да, примерно так работает автомобильный ДМРВ (датчик массового расхода воздуха) который используется в системе управления впрыском топлива. Д 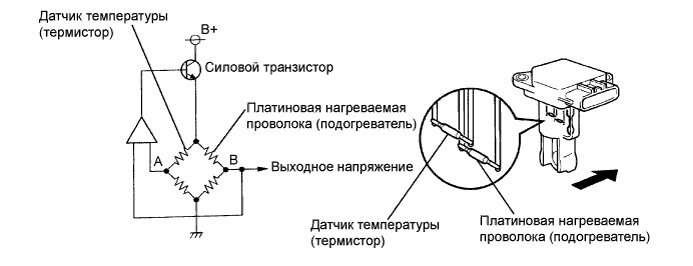 МРВ, изображение с сайта mylada.net МРВ, изображение с сайта mylada.netТо есть, прямым измерением некоторой величины называется измерение ее датчиком для этого и предназначенным. Косвенным измерением называется вычисление измеряемой величины через прямые измерения других величин, которые связаны с измеряемой. Фактически, все наши измерения косвенные, так как, в большинстве случаев мы измеряем электрические параметры на которые измеряемая величина влияет. Или механические, например, изгиб биметаллической пластины. Однако, факт такого преобразования игнорируется, для упрощения и выделения именно сути косвенного измерения, когда мы идем обходным путем. Измерение может быть контактным и бесконтактным. Например, мы можем измерить температуру инфракрасным термометром не касаясь, и даже не приближаясь, к объекту измерения. Не всегда бесконтактность очевидна. Например, опять немного забегая вперед, возьмем емкостный датчик уровня жидкости в виде трубки опущенной в сосуд. На первый взгляд, тут явно контактный способ измерения. Но надо учесть, что сам датчик, обкладки конденсатора, изолированы от объекта измерения, жидкости. То есть, измерение ведется бесконтактным способом. А вот если мы определяем уровень с помощью металлических электродов используя проводимость воды, то способ измерения у нас контактный. Так как датчик, электроды, контактируют с водой, как объектом измерения. Выходной сигнал датчиков может быть логическим, то есть, иметь только два значения - включено или выключено, ноль или 1. Выходной сигнал может быть аналоговым, то есть изменяться плавно, в какой то функциональной зависимости от измеряемой величины. Например, выходное напряжение, или ток, датчика могут быть пропорциональны температуре. Выходной сигнал может быть числовым, например, количество импульсов в зависимости от скорости вращения вала. Обратите внимание, я не назвал ни одного конкретного значения (кроме 0 и 1). Дело в том, что уровни токов и напряжений могут быть совершенно разными в разных системах. И совсем не обязательно соответствовать уровням TTL или CMOS логике. Например, диапазон аналоговых сигналов часто бывает от 0 до 10 В, или от 4 до 20 мА. А уровни логических 0 и 1 могут быть -12 В и +12 В. Именно по этой причине чаще всего и присутствует УСО, для согласования уровней, и протоколов, как будет видно дальше, сигналов датчиков с уровнями внутри устройства управления. Теперь давайте рассмотрим датчики исходя из принципа измерения. Это важно. Контактные датчики Простой вид датчиков. Обычно, представляют из себя одну, или несколько, контактных групп замыкающихся, или размыкающихся, при определенных условиях. Это могут быть датчики касания (например, концевые выключатели), датчики давления, датчики температуры (как показанный выше биметаллический регулятор), и прочие. Вот пара примеров для иллюстрации К 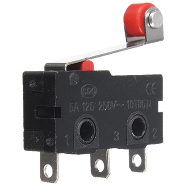  онцевой выключатель онцевой выключательАвтомобильный датчик давления масла, изображение с сайта drive2.ru Т  ермостат для водонагревателя. Изображение с сайта stroy-podskazka.ru ермостат для водонагревателя. Изображение с сайта stroy-podskazka.ruНе смотря на внешние различия и разное функциональное назначение, принцип работы контактных датчиков неизменен - переключение контактов под действием механической силы. Воздействие этой силы может быть прямым, как у контактного выключателя. Может быть опосредованным, как у датчика давления масла, где масло давит на мембрану, которая, в свою очередь, передает давление на контакты. Может быть косвенным, как у термостата, где измерительная капсула и трубка заполнены жидкостью с большим коэффициентом термического расширения. Изменение температуры вызывает изменение давления в жидкости, так как объем неизменен, которое через мембрану передается на контакты. Выходной сигнал таких датчиков только логический, хотя есть и исключения о которых я расскажу. Кстати, клавиатуры, например, для управления и ввода параметров, тоже являются контактными датчиками, в большинстве случаев. Не все контактные датчики выдают логический сигнал на выходе. Например, датчик вращения вала может выдавать один импульс на один оборот. И с этой точки зрения его сигнал логический. Но с другой стороны, если посчитать количество импульсов, например, за минуту, то мы получим скорость вращения вала в оборотах в минуту. То есть, выходной сигнал будет числовым. Резистивные датчики Тоже довольно простые датчики. Часто используются как датчики положения или датчики уровня. Хотя могут использоваться и в датчиках давления, температуры, скорости, и прочих. В качества примера приведу датчик уровня топлива  Резистивный датчик уровня топлива. Изображение с сайта rezistiv.ru Резистивный датчик уровня топлива. Изображение с сайта rezistiv.ruРезистивные датчики могут иметь подвижный контакт, или не иметь его. От этого суть не меняется. Датчик уровня топлива имеет подвижный контакт связанный с поплавком. Положение поплавка (уровень топлива) с помощью подвижного контакта преобразуется в сопротивление. Точно так же, как в реостате или переменном резисторе.  Для оценки освещенности часто применяются фоторезисторы, сопротивление которых зависит от освещенности. Для оценки освещенности часто применяются фоторезисторы, сопротивление которых зависит от освещенности.Фоторезистор. Изображение с сайта joyta.ru Фоторезисторы не имеют подвижных контактов. Как и терморезисторы, сопротивление которых зависит от температуры. Т  ерморезистор. Изображение с сайта chipdip.ru ерморезистор. Изображение с сайта chipdip.ruРезистивные датчики, тензометры, применяют и для измерения механических нагрузок, например, веса. 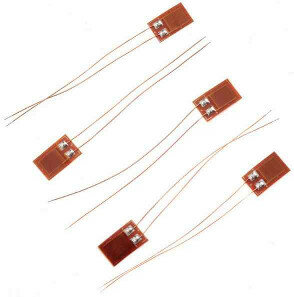 Тензоресторы ТензоресторыРезистивные датчики изменяют свое сопротивление в какой то функциональной зависимости от изменения измеряемой величины. Естественно, их выходной сигнал аналоговый. Полупроводниковые датчики Могут быть как очень простыми, так и очень сложными. Как следует из названия, в них используются свойства полупроводниковых материалов, p-n переходов, эффекты электромагнитного поля, и тому подобное. Такие датчики могут самыми разнообразными, но их объединяет тот факт, что полупроводник используется непосредственно для измерения, а не для преобразования результатов измерения. Так датчик температуры может состоять из терморезистора и схемы нормирования сигнала. Такой датчик не является полупроводниковым, хотя и содержит внутри полупроводниковые элементы. Выходные сигналы таких датчиков могут быть самыми разными. И логическими, и аналоговыми, и числовыми, и прочими.  Простейшим полупроводниковым датчиком является обычный диод, который можно использовать для измерения температуры. Дело в том, что вольт-амперная характеристика p-n перехода зависит от температуры. Кроме диода для измерения температуры можно использовать и транзисторы. Чувствительность таких датчиков, конечно, не велика, но они выпускаются и как самостоятельные электронные компоненты, только с нормированными характеристиками и повышенной линейностью, например, TC1047A, и в составе таких популярных цифровых датчиков, как DS18B20. Простейшим полупроводниковым датчиком является обычный диод, который можно использовать для измерения температуры. Дело в том, что вольт-амперная характеристика p-n перехода зависит от температуры. Кроме диода для измерения температуры можно использовать и транзисторы. Чувствительность таких датчиков, конечно, не велика, но они выпускаются и как самостоятельные электронные компоненты, только с нормированными характеристиками и повышенной линейностью, например, TC1047A, и в составе таких популярных цифровых датчиков, как DS18B20.Ц  ифровой термодатчик DS18B20 ифровой термодатчик DS18B20Аналоговый термодатчик TC1047 Другими простыми полупроводниковыми датчиками являются фотодиод и фототранзистор. Дело в том, что на ВАХ p-n переходов влияет не только не температура, но и освещенность. Часто, фототранзисторы не имеют отдельного вывода базы и внешне не отличимы от фотодиодов. В отличии от фоторезисторов, фотодиоды и фототранзисторы обычно используют не для измерения освещенности, а для фиксации самого факта освещения. Причем чаще всего для инфракрасных лучей спектра. Фотоприемники сигналов с пультов ДУ в телевизорах, датчики приближения в телефонах, счетчики посетителей в магазинах используют фотодиоды и фототранзисторы. Ф  ототранзистор с отдельным выводом базы ототранзистор с отдельным выводом базыФотодиод или фототранзистор без отдельного вывода базы. Предназначены только для ИК диапазона, о чем свидетельствует темный светофильтр предназначенный для отсекания видимого света Ф  отодиод или фототранзистор без отдельного вывода базы. Предназначены только для ИК диапазона, о чем свидетельствует темный светофильтр предназначенный для отсекания видимого света отодиод или фототранзистор без отдельного вывода базы. Предназначены только для ИК диапазона, о чем свидетельствует темный светофильтр предназначенный для отсекания видимого светаКроме самостоятельного применения входят в состав оптопар (оптронов) с открытым, или закрытым каналом. О  птопара с открытым каналом птопара с открытым каналомТипичным представителем полупроводниковых датчиков являются датчики магнитного поля использующие эффект Холла. Они выпускаются и в виде отдельных компонентов, и в составе микросхем для измерения больших токов. 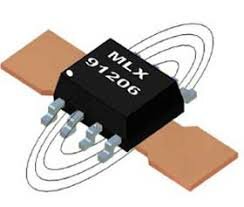 Д Д атчик Холла атчик ХоллаДатчик больших токов использующий эффект Холла Индуктивные датчики Датчики представляющие собой катушку индуктивности или трансформатор. Причем как с сердечником, так и без. Их работа основана на явлении электромагнитной индукции. Одним из старых вариантов индуктивного датчика является вариометр, который использовался в радиоприемниках для настройки на станцию вместо конденсатора переменной емкости. Вариометры проще в изготовлении, чем многосекционные КПЕ, что и обеспечивало его применение. Причем вариометры широко использовались в автомобильных приемниках вплоть до 80-х годов прошлого века. Представляет из себя катушку индуктивности с подвижным сердечником (медным или ферритовым). Перемещение сердечника изменяет индуктивность катушки. 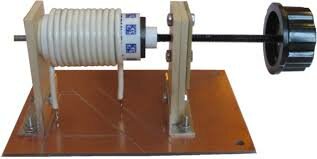 Вариометр. Изображение с сайта vpayaem.ru Вариометр. Изображение с сайта vpayaem.ruВариометр. Изображение с сайта vpayaem.ru Существовал и другой вариант, с двумя катушками, положение одной из которых можно менять  Вариометр с двумя катушками. Изображение с сайтаlikeness.ru Вариометр с двумя катушками. Изображение с сайтаlikeness.ruВариометр с двумя катушками. Изображение с сайтаlikeness.ru Он использует другой принцип. Фактически, это трансформатор, коэффициент связи между обмотками которого можно менять. Индуктивным датчиком является и магнитофонная головка.Магнитная лента имеет разную намагниченность по своей длине, так и записывается на нее информация. Проходящая мимо головки лента наводит в головке переменной напряжение, которое далее усиливалось.  Магнитофонная головка Магнитофонная головкаМагнитофонная головка Довольно часто можно встретить индуктивные датчики положения вала или скорости вращения. 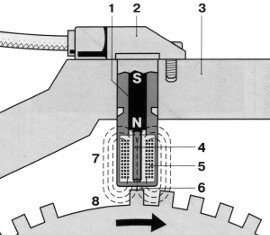 Датчик положения коленвала двигателя автомобиля. Виден принцип работы. Датчик положения коленвала двигателя автомобиля. Виден принцип работы.Датчик положения коленвала двигателя автомобиля. Виден принцип работы. Существуют индуктивные датчики приближения. Они могут быть двух видов, основанные на изменении индуктивности катушки, и трансформаторные, основанные на изменении связи между катушками.  Индуктивный датчик приближения. Изображение с сайта wikidot Индуктивный датчик приближения. Изображение с сайта wikidotИндуктивный датчик приближения. Изображение с сайта wikidot Индуктивные датчики используют изменение индуктивности, взаимной индуктивности, коэффициента связи, наведенной ЭДС. Выходной сигнал, обычно аналоговый. Емкостные датчики Используют изменение емкости измерительного конденсатора. Емкость конденсатора зависит от диэлектрической проницаемости диэлектрика между его обкладками. Причем конденсатор не обязан быть плоским. Этот тип датчиков, в отличии от описанных ранее, имеет очень высокое сопротивление, что требует специального подхода к проектированию измерительных схем. Выходной сигнал таких датчиков аналоговый. Наверное, наиболее известно применение емкостных датчиков как сенсорных клавиш. Ведь сейчас каждый смартфон имеет сенсорный экран, как раз емкостного типа. Сенсорные кнопки реагируют на изменение емкости относительно земли, или емкости между двумя площадками. 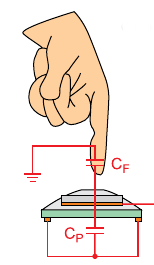 Емкостная сенсорная кнопка. Иллюстрация из журнала КОМПОНЕНТЫ И ТЕХНОЛОГИИ номер 2 за 2013 год Емкостная сенсорная кнопка. Иллюстрация из журнала КОМПОНЕНТЫ И ТЕХНОЛОГИИ номер 2 за 2013 годЕмкостная сенсорная кнопка. Иллюстрация из журнала КОМПОНЕНТЫ И ТЕХНОЛОГИИ номер 2 за 2013 год Поднесение пальца к площадке кнопки, не касаясь ее, добавляет к емкости самой площадки Cp емкость пальца Cf, которая, по своей сути, является емкостью тела человека относительно земли. Мы можем уменьшить помехи разместив две площадки рядом и измеряя изменение емкости между этими площадками. тело человека состоит по большей части из воды, диэлектрическая проницаемость которой гораздо выше диэлектрической проницаемости воздуха. Что и вызовет изменение емкости между площадками, то есть, емкости конденсатора, при поднесении пальца. То же самое произойдет при попадании капли воды. Другим известным примером емкостного датчика является датчик присутствия человека. При этом обкладка конденсатора размещается, например, под покрытием пола и, обычно, делается в виде проволочной сетки. При приближении человека емкость этого сенсора относительно земли увеличивается. Другим примером использования емкостного датчика является измерение влажности, например, почвы или зерна. Я говорил об этом здесь. Емкостными датчиками можно измерять уровень жидкости, и многое другое. Несколько нетипичным примером емкостного датчика является электретный микрофон. Пьезодатчики Работа пьезоэлектрических датчиков основана на явлении пьезоэффекта. При воздействии деформирующих сил на некоторые кристаллы они способны вырабатывать электричество. Наиболее ярко это проявляется в пьезозажигалках, например, для газа, которые невозможно отнести к датчикам. Пьезоэлементы широко применяли в звукоснимателях проигрывателей грампластинок, за исключением дорогих моделей электродинамической системы. Сейчас пьезоэлементы применяют в датчиках детонации систем управления двигателями внутреннего сгорания. Однако такие датчики менее распространены, по сравнению с вышеописанными. Поэтому не буду задерживаться на них. Выходной сигнал таких датчиков аналоговый. Прочие типы датчиков Остальные датчики я лишь кратно упомяну, хотя некоторые из них не так редко применяются. PIR датчики движения. По сути являются инфракрасными датчиками состоящими из нескольких чувствительных элементов. Выходной сигнал аналоговый. Фактом срабатывания такого датчика, формируемым внешней, по отношению к датчику схемой, является изменение относительного уровня сигналов с разных элементов датчика.  Пироэлектрический датчик Пироэлектрический датчикПироэлектрический датчик Микроволновые датчики движения и приближения. Используют отражение высокочастотного (микроволнового) излучения от объектов окружающего мира. В какой то мере являются небольшими радарами, но не измеряют скорость движения. Ультразвуковые датчики. Подобны микроволновым, но используют не радиочастотное излучение, и ультразвук. Используются, в частности, и в дефектоскопии. Ультразвуковые датчики близости иногда используются в любительских конструкциях.  Ультразвуковой датчик Ультразвуковой датчикУльтразвуковой датчик Существует огромное количество других датчиков, их невозможно охватить в одной статье. Да и не нужно. Комбинируя различные датчики и методы измерения можно измерять почти все. Если не напрямую, то косвенно. Кроме того, для измерения одной и той же величины, например, уровня жидкости, можно использовать датчики основанные на разных принципах. Все зависит от требований. С датчиками закончили, пора переходить к исполнительным устройствам. Исполнительные устройства. Управление исполнительными устройствами По большей части, систему управления не интересуют сами исполнительные устройства, интересно лишь управление ими и их характеристики. Эта часть статьи будет значительно короче части про датчики, так способов управления исполнительными устройствами не так много. Обычно, управление исполнительными устройствами заключается в подаче на них питания с , возможно, управляемым напряжением или током. Однако, не всегда все так просто. Иногда требуется использование ШИМ (широтно-импульсной модуляции) или управления частотой. Кроме того, исполнительные устройства могут обладать значительными индуктивностью или емкостью, что необходимо учитывать. Давайте разбираться по порядку. Сразу отмечу, что я не буду уделять внимание цепям демпфирования (снабберам), за исключением короткого их упоминания. Управление нагрузкой постоянного тока Если не требуется регулировать напряжение, то все сводится к обычному выключателю в качестве которого можно использовать транзисторы или реле. И управление будет логическим - включено или выключено, 0 или 1. В качестве электронных ключей можно применять и биполярные, и полевые (MOSFET) транзисторы соответствующей мощности, которые непосредственно коммутируют нагрузку или управляют реле, которые уже коммутируют нагрузку. 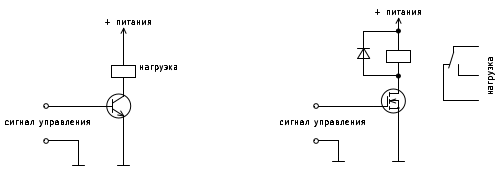 Управление исполнительным устройством постоянного тока с помощью транзисторов и реле. Иллюстрация моя Управление исполнительным устройством постоянного тока с помощью транзисторов и реле. Иллюстрация мояУправление исполнительным устройством постоянного тока с помощью транзисторов и реле. Иллюстрация моя В этом разделе часть иллюстраций будет в виде сильно упрощенных принципиальных схем. На схеме выше я показал оба ранее упомянутых электронных ключа и оба варианта управления. Причем, на рисунке слева, нагрузка чисто активная, например, нагревательный элемент или лампочка. На рисунке справа можно увидеть дополнительный элемент - диод. Дело в том, что обмотка реле это индуктивная нагрузка. А в индуктивности, при ее отключении, ток не может прекратиться мгновенно. В полном соответствии с законами физики. В результате на обмотке образуется выброс напряжения довольно высокой амплитуды который создает помехи и может повредить транзистор. Этот импульс и гасится диодом. Это один из вариантов гашения импульса при отключении индуктивной нагрузки. Нагрузка может быть не только индуктивной, но и емкостной. Это вызывает бросок тока при включении, который так же создает помехи и может повредить транзистор. В этом случае можно использовать NTC термисторы, про которые я говорил здесь. Если требуется регулировка напряжения на нагрузке, то обычно используется ЦАП (цифро-аналоговый преобразователь), возможно, самый простой, или коммутация источников опорного напряжения. То есть, формируется необходимое напряжение, которое используется в качестве опорного в схеме регулирования напряжения. Я не буду приводить схему этого варианта, что бы не перегружать статью. Стоит заметить, что коммутация мощных нагрузок постоянного тока не так проста, как может показаться. Многие реле существенно ограничивают допустимую нагрузку на контакты для постоянного тока. Дело в том, что при отключении нагрузок с индуктивной составляющей между контактами может возникнуть дуга, которую не удастся быстро погасить, так как, в отличии от переменного напряжения, постоянное не будет ни снижаться до нуля, ни менять знак. Кроме того, при использовании реле нужно использовать цепи гашения выбросов и для контактов реле, которые нагрузку коммутируют. Так как ток постоянный, то для этой цели можно использовать быстродействующий диод, с соответствующим допустимым током. Управление нагрузкой переменного тока Для управления нагрузкой переменного тока, обычно, используются реле и симисторы (или тиристоры). Использование реле почти ничем не отличается от такового для постоянного тока. Разница состоит в том, что мы теперь не можем использовать диод параллельно контактам реле для гашения выбросов. Приходится использовать варисторы, о который я так же говорил здесь. Управление симистором, в отличии от реле, дает нам дополнительную возможность - включение нагрузки в момент перехода напряжения через нулевой уровень. Это не всегда нужно, но часто бывает полезно. Симистор открывается очень быстро, в отличии от реле, так что моментом его включения можно эффективно управлять. Что бы включит тиристор или симистор нужно подать ток в их управляющий электрод. Выключится симистор сам, когда напряжение снизится до нуля, то есть, два раза за период переменного напряжения. Я не буду вдаваться в тонкости управления симисторами и тиристорами, статье не об этом. Скажу лишь, что для гальванической развязки от сети для управления используют трансформаторы или оптроны. И приведу схему включения с использованием оптрона и контролем перехода через 0. 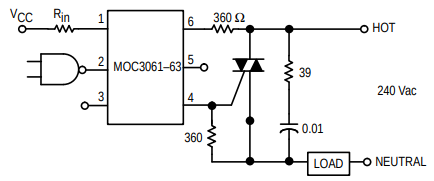 Схема включения симистора с использованием оптрона и контролем перехода через 0. Схема включения симистора с использованием оптрона и контролем перехода через 0.Схема включения симистора с использованием оптрона и контролем перехода через 0. Обратите внимание на цепочку из резистора 39 Ом и конденсатора 0.01 мкф. Это демпфирующая цепь, или снаббер, цель которой не столько защитить симистор от выбросов напряжения, сколько исключить его ошибочное включение из-за превышения скорости нарастания напряжения. Существует еще фазовый способ управления симисторами и тиристорами. Он используется в различных регуляторах мощности, например, в электроинструменте или для регулировки яркости освещения. Для управления нагрузкой переменного тока, причем с возможностью плавного регулирования, можно использовать и транзисторы, но включенные в диагональ диодного моста. Этот способ сейчас применяется очень редко, поэтому не буду приводить схему, ограничусь лишь упоминанием. ШИМ (широтно-импульсная модуляция) Обычно, используется для управления нагрузками постоянного тока, но не обязательно. Фазовый или фазоимпульсный способы управления нагрузкой переменного токая тоже отнести к некоторому подобию ШИМ. Суть метода заключается в том, что действующее значение импульсного напряжения зависит не только от формы импульсов, но и от коэффициента заполнения (отношение длительности импульса к периоду), или скважности (обратная величина, по отношению к коэффициенту заполнения, то есть, отношение периода к длительности импульса), если говорить о прямоугольных импульсах.  ШИМ. Изображение с сайта xtechx.ru ШИМ. Изображение с сайта xtechx.ruШИМ. Изображение с сайта xtechx.ru На рисунке показано три разных коэффициента заполнения импульсов. Чем выше коэффициент заполнения (или, чем ниже скважность), тем выше действующее значения напряжения. Однако, нагрузка постоянного тока весьма скептически отнесется к питанию напряжением такой формы. Поэтому на выходе обычно устанавливают LC фильтры, которые и формируют постоянное напряжение пропорциональное скважности импульсов. Частотное регулирование Не всегда нагрузкой можно управлять включением/выключением или ШИМ. Например, асинхронные двигатели переменного тока не позволят плавно регулировать скорость вращения кроме как изменением частоты питающего напряжения. Поэтому, когда требуется не простое включение такого двигателя, а управление скоростью его вращения, используют частотные преобразователи. Это отдельная большая тема для разговора, поэтому не буду в нее углубляться. УСО (Устройства сопряжения с объектами) Устройства управления не могут быть рассчитаны на возможность подключения всего спектра датчиков и исполнительных устройств. Да и количество входов/выходов обычно ограничено. Поэтому в том, или ином виде, системы управления часто включают в свой состав одно, или несколько, УСО. Функции УСО: 1. Преобразование уровней токов и напряжений датчиков к необходимым УУ уровням. 2. Преобразование уровней токов и напряжений УУ к необходимым исполнительным устройства уровням. 3. Увеличение количества доступных входов/выходов. 4. Преобразование протоколов связи с датчиками и исполнительными устройствами. 5. Расширение списка доступных протоколов обмена. 6. Защита входов и выходов УУ. Это не полный список, но он дает общее представление. Преобразование уровней, обычно, выполняется ограничителями, усилителями-ограничителями, нормирующими усилителями, преобразователями уровня и полярности. Увеличение количества входов/выходов обеспечивается или микросхемами расширителями портов расположенными прямо на плате устройства управления, или возможность подключения внешних модулей расширения. Преобразование протоколов связи и расширение списка протоколов нужно обговорить особо. Дело в том, что датчики и исполнительные устройства редко размещаются рядом. Значит надо обеспечить безошибочную передачу данных и сигналов управления на большое расстояние, иногда, километры, не взирая на помехи и потери в линии связи. Кроме того, необходимо использовать минимального количества отдельных линий в канале связи обеспечив, при этом возможность подключения максимального количества устройств и датчиков. Для решения этой проблемы существует множество физических и логических шин и протоколов, включая и нестандартные, и закрытые. Из физических протоколов можно вспомнить RS-485/422, RS-232, наши стык С2 и ИРПС, токовую петлю 20 мА, токовую петлю 4-20 мА, шину CAN, шину LIN, 1-Wire, I2C. И это далеко не полный список. Не все из этих протоколов рассчитаны на работу на больших расстояниях, но в пределах одного блока, или для подключения рядом расположенных (в пределах одного шкафа) модулей и они могут использоваться. Для логической организации каналов связи поверх физического уровня может использоваться логический. Так по физическому протоколу RS-485 могут работать, например, Mоdbus и Profibus. Блок управления, например, может включать в себя устройство управления и УСО в виде регистров расширения цифровых входов, на 8 линий, и выходов, на 8 линий. УСО с нормирующими усилителями на 4 аналоговых лини. УСО для подключения датчиков и исполнительных устройств по RS-485 по обычному протоколу UART. Шину I2C для внутренних нужд и подключения модулей расширения. А сама система управления может дополнительно включать в себя преобразователь протоколов (УСО) Modbus-UART и модуль расширения (УСО) для подключения датчиков DS18B20 и ЦАП по шине 1-Wire. Ну а о необходимости защиты входов и выходов и говорить не стоит. Ни одна более менее серьезная система без этого не может. Самодельные любительские устройства и системы автоматики могут не иметь УСО в явном виде. Однако, учитывая популярность темы "умный дом", системы управления все больше приобретают вид полноценных систем. УУ (устройство управления) Мозг системы управления. Центральный блок. Управляет всеми остальными компонентами системы. Обычно, выполняется на микроконтроллерах, как 8, так и 32 разрядных. Может реализовывать жесткую логик, иногда позволяя задавать некоторые параметры управления, или иметь возможность описывать пользовательские алгоритмы управления описываемые на каком либо языке программирования (я не про Arduino). В промышленности для этого чаще используют готовые ПЛК (программируемые логические контроллеры)  ПЛК с модулем расширения ПЛК с модулем расширенияПЛК с модулем расширения Нужно сказать, что устройство управления, каким бы мощным оно ни было, предоставляет лишь возможности, которые использует разработчик. Ключ к успешной реализации системы управления в корректных алгоритмах управления основанных на верной математической модели объекта управления. Понимание принципов функционирования объекта управления позволит выбрать и подходящие датчики. Слепое же копирование чужих решений редко дает желаемый результат, так как отсутствует понимание. Заключение Ну вот, пожалуй, и все для начала. Надеюсь, мне удалось дать вам понимание азов систем автоматического и дистанционного управления. |