готовая работа 7 варианта. Идентификация дискретной динамической модели по имитационной модели объекта
 Скачать 257.18 Kb. Скачать 257.18 Kb.
|

ИДЕНТИФИКАЦИЯ ДИСКРЕТНОЙ ДИНАМИЧЕСКОЙ МОДЕЛИ ПО ИМИТАЦИОННОЙ МОДЕЛИ ОБЪЕКТАЦель работы: изучение методов построения дискретных динамических моделей, используемых при синтезе цифрового управления, и идентификация параметров моделей объектов регулирования, описываемых конечно-разностными уравнениями. Непрерывная модель, описывающая поведение объекта с сосредоточенными параметрами, представляет собой непрерывную функцию  и может быть интерпретирована в виде графика (рис.1). и может быть интерпретирована в виде графика (рис.1).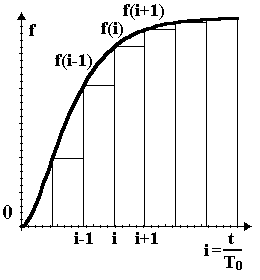 Рис.1. График функции Весь диапазон времени разбивается на равные интервалы.  - такт квантования. Обозначим - такт квантования. Обозначим  - текущий индекс (номер) такта квантования. - текущий индекс (номер) такта квантования.При малых тактах квантования разностные уравнения можно получать из дифференциальных путем дискретизации последних [2]. В частности, дифференциалы могут приближенно заменяться правыми разностями:  ; ; ; (1) ; (1) . .Таким образом можно получить производную  -го порядка в виде разностной схемы. -го порядка в виде разностной схемы.Из теории автоматического управления известно, что модели (рис.2) динамических объектов с запаздыванием в непрерывном виде могут быть представлены дифференциальными уравнениями или соответствующими передаточными функциями:  (2) (2)или  (3) (3)где  - выходной сигнал объекта; - выходной сигнал объекта;  - входной сигнал объекта; - входной сигнал объекта;  - коэффициент усиления объекта; - коэффициент усиления объекта;  - время чистого запаздывания объекта; - время чистого запаздывания объекта;  - оператор преобразования Лапласа; - оператор преобразования Лапласа;  - постоянные времени объекта, по которым могут вычисляться коэффициенты - постоянные времени объекта, по которым могут вычисляться коэффициенты  дифференциального уравнения (2): дифференциального уравнения (2):при   , ,при   , ,  , ,при   , ,  , ,  . .Описание постановки задачиТаблица 1 Исходные данные
Таблица 2 Исходные данные
Расход топлива - температура в котле является апериодическом звеном второго порядка с чистым запаздыванием и представляется в виде дифференциального уравнения второго порядка.  (4) (4)Математическая формулировка задачисоответствующей передаточной функции  . (5) . (5)Из дифференциального уравнения (4) получим конечно-разностное:  . (6) . (6)Преобразуя это уравнение, выразим из него  . . (7) (7)Введем обозначения:  , (8) , (8) , (9) , (9) . (10) . (10)Отсюда  (11) (11)Уменьшая текущий индекс такта квантования на единицу в левой и правой частях уравнения (11), получим конечно-разностное уравнение второго порядка, удобное для практического использования:  (12) (12) , (13) , (13)где  - выход объекта без помехи; - выход объекта без помехи;  - измеряемое значение выходного сигнала с помехой - измеряемое значение выходного сигнала с помехой  ; ;  - коэффициент помехи, определяющий уровень помехи на каждом такте квантования; - коэффициент помехи, определяющий уровень помехи на каждом такте квантования;  . .Для уравнения (12) начальные условия принимаются нулевыми и определяются его порядком:  , (14) , (14) . .Если на вход имитационной модели подается единичное ступенчатое воздействие, то, начиная с такта квантования  , ,   . .  определяется временем переходного процесса определяется временем переходного процесса  : : =. (15) =. (15)переходный процесс объекта регулирования  с учетом помехи с учетом помехи  . .На вход имитационной модели объекта подается единичное ступенчатое воздействие , т.е. проводится активный эксперимент. Точки кривой разгона для заданного такта квантования  рассчитываются по уравнениям (12),(13). рассчитываются по уравнениям (12),(13).Ставится задача: по полученной на имитационной модели объекта регулирования кривой разгона найдем параметры математической модели той же структуры, то есть восстановим коэффициенты  в уравнении (16): в уравнении (16): , (16) , (16)где  - выход восстанавливаемой модели объекта; - выход восстанавливаемой модели объекта; -восстанавливаемые коэффициенты модели объекта. Для решения поставленной задачи воспользуемся методом наименьших квадратов (МНК), широко применяющимся для параметрической идентификации моделей объектов регулирования.  . (17) . (17)В уравнении (16) индекс  при при  и и  можно заменить на индекс , т.к. для определения всегда известны измеренные значения можно заменить на индекс , т.к. для определения всегда известны измеренные значения  и и  . Поэтому для любого . Поэтому для любого  -го такта квантования справедливо: -го такта квантования справедливо: . (18) . (18)Подставив (18) в (17), получим:  (19) (19)Так как функция  положительно определенная в силу квадратичной формы, то необходимым и достаточным условием экстремума является равенство нулю первых производных по искомым параметрам: положительно определенная в силу квадратичной формы, то необходимым и достаточным условием экстремума является равенство нулю первых производных по искомым параметрам: ; ; ; (20) ; (20) ; ;После преобразования получим:   (21) (21) Параметры , удовлетворяющие критерию (17), находятся решением системы (21) линейных уравнений [1]. МНК в приведенной постановке со стохастическим возмущающим сигналом позволяет получить достоверные и несмещенные оценки параметров .При равенстве нулю коэффициента помехи , т.е. при отсутствии возмущений на выходе имитационной модели, когда  , оценки должны совпадать с , оценки должны совпадать с  (до погрешности вычислений). (до погрешности вычислений).По полученным из системы (21) можно восстановить значения параметров соответствующей передаточной функции объекта (5)  . .После получения параметров разностного уравнения (16) необходимо оценить меру соответствия полученной модели реальному объекту (имитационной модели), т.е. проверить адекватность модели объекту.Адекватность устанавливается по критерию Фишера [3], для чего рассчитывается дисперсионное соотношение  : : , (22) , (22)где  - дисперсия относительно среднего, характеризующая отклонение выхода объекта от среднего значения - дисперсия относительно среднего, характеризующая отклонение выхода объекта от среднего значения  ; ;  - остаточная дисперсия, характеризующая отклонение выхода модели от выхода объекта . - остаточная дисперсия, характеризующая отклонение выхода модели от выхода объекта . , (23) , (23) , (24) , (24)где  - среднее значение выхода объекта; - среднее значение выхода объекта;  - число связей, наложенных на выборку, равное числу определяемых коэффициентов (для уравнения (16) - число связей, наложенных на выборку, равное числу определяемых коэффициентов (для уравнения (16)  ). ).Полученное разностное уравнение (25) модели считается адекватным объекту, если расчетное значение больше некоторого критического значения  , т.е. при выполнении неравенства: , т.е. при выполнении неравенства: , (25) , (25)где - критическое значение критерия, зависящее от чисел  степеней свободы для дисперсии и степеней свободы для дисперсии и  и от уровня значимости . и от уровня значимости .Критическое значение Фишера выбирается из таблиц распределения Фишера [4]. Уровень значимости принять равным  . При невыполнении условия (25) уравнение (18) модели не адекватно объекту. . При невыполнении условия (25) уравнение (18) модели не адекватно объекту.Схема алгоритма решения Рис. 4. Схема алгоритма решения задачи  Рис. 4. Продолжение  Рис.4. Окончание Распечатка программы и результатов расчетовГрафики переходных процессов объекта (при наличии помехи и без нее) и модели (разных порядков) Анализ полученных результатов | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||






