тау. канал регулирования. Идентификация объекта управления
 Скачать 78.97 Kb. Скачать 78.97 Kb.
|

|
Рассмотрим систему автоматического регулирования давления топливного газа, подаваемого на горелки. Необходимо рассчитать настройки регулятора, системы автоматического регулирования давления газа. Допустимое превышение установлено в размере 10%. Идентификация объекта управленияИдентификация динамических объектов в общем случае заключается в определении их структуры и параметров по наблюдаемым данным - входным воздействиям и выходным значениям. В этом случае объект (элемент системы, объект управления, элемент процесса и т. д.) представляет собой «черный ящик». Исследователь должен, подвергая объект внешним воздействиям и анализируя его реакции, получить математическую модель (описание его строения и параметров), т.е. превратить «черный ящик» в «белый ящик», добиться его «информационной прозрачности». Графически процесс идентификации представлен на рис. 1. 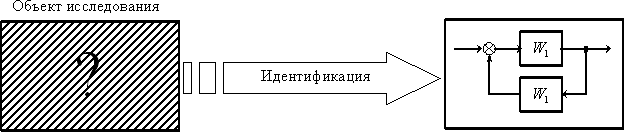 Рисунок 1. Процесс идентификации Переходная характеристика системы h(t) является реакцией на внешнее единичное воздействие при нулевых начальных условиях объекта управления, т. е. при x (0) = 0 и y (0) = 0, и характеризует ее динамические свойства. Получение переходной характеристики экспериментальным путем с последующим получением параметров является первым шагом в определении настроек ПИД-регулятора, ПИ-регулятора, П-регулятора. На практике чаще всего речь идет о разгонных характеристиках. Переходная характеристика ускорения объекта будет получена, если на вход будет подано ступенчатое воздействие, отличное от единицы. Часто в реальном объекте входное воздействие применяется для нескольких процентов хода привода, а затем выходное воздействие делится на входное воздействие. Для определения динамических характеристик объекта на практике чаще всего используют метод переходных характеристик. При определении динамических характеристик объекта по его переходной характеристике (кривой ускорения) на вход подается либо ступенчатый тестовый сигнал, либо прямоугольный импульс. Во втором случае переходная характеристика (кривая отклика) должна быть дополнена соответствующей кривой ускорения. Процесс получения передаточной функции объекта из переходных данных называется идентификацией объекта. При приеме переходной характеристики необходимо выполнение ряда условий: 1. Если система предназначена для стабилизации параметров процесса, переходная характеристика должна измеряться вблизи рабочей точки процесса. 2. Переходные характеристики необходимо снимать как при положительном, так и при отрицательном шагах управляющего сигнала. О степени асимметрии объекта можно судить по форме кривых. Если асимметрия незначительна, рекомендуется рассчитывать настройки регулятора на основе усредненных значений параметров передаточной функции. Линейная асимметрия чаще всего проявляется в объектах теплового контроля. 3. При наличии шума на выходе желательно взять несколько переходных характеристик (кривых ускорения) и затем наложить их друг на друга для получения усредненной кривой. 4. При приеме переходной характеристики необходимо выбирать наиболее устойчивые режимы процесса, например, ночные смены, когда действие внешних случайных возмущений маловероятно. 5. При снятии переходной характеристики амплитуда тестового входного сигнала должна быть, с одной стороны, достаточно большой, чтобы отчетливо выделить переходную характеристику на фоновом шуме, а с другой стороны, достаточно малой, чтобы не нарушать нормальный ход процесса. Начальные условия для переходной характеристики: В начальный момент система управления должна находиться в состоянии покоя, т. е. регулируемая переменная X (например, температура печи) и управляющее воздействие регулятора Y (выход регулятора на привод) не изменились, и отсутствие внешних помех. Например, температура в печи остается постоянной, а привод не меняет своего положения. Затем на вход исполнительного механизма подается ступенчатое воздействие, например, включается печь. В результате состояние объекта начинает меняться. Рассмотрим графики переходных характеристик системы автоматического регулирования давления топливного газа P(t), подаваемого на горелки, при ступенчатом изменении положения регулятора РО  Рисунок 2. Процент открытия регулирующего клапана  Рисунок 3. Давление газа в системе Математическая модель объекта управления представляет собой апериодическую запаздывающую связь первого порядка. Передаточная функция такого звена имеет вид:  где: К - усиление, Т - постоянная времени, τ - постоянная времени задержки. По графику переходной характеристики объекта управления находим параметры объекта управления. Постоянную времени можно определить, как момент времени, в который касательная к переходному процессу в начальной точке траектории пересекает установленное значение выходной величины. Определим постоянную времени Т=4,4с; 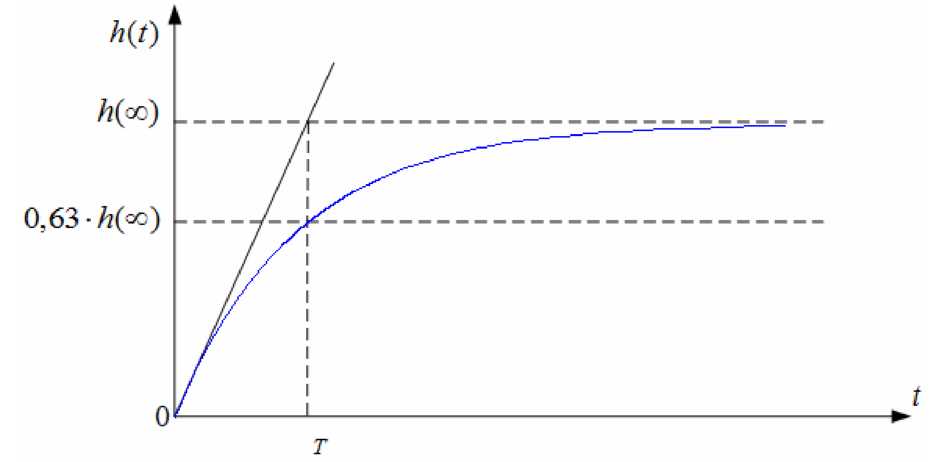 Рисунок 4. Определение постоянной времени Постоянная времени задержки τ = 0,1 с; Начальное значение выходного сигнала Yн = 0,74 МПа; Устойчивое значение выходного сигнала Yу= 1,787 МПа; Исходное положение регулирующего органа H0=58%; Конечное положение регулирующего органа Hmax=68%. Используя полученные параметры объекта, определяется относительное изменение контролируемого параметра δ:  Относительное изменение входной величины μ:  Коэффициент передачи объекта:  Передаточная функция объекта имеет вид:  Определение параметров регулятораРегулятор работает в дискретном режиме, а передаточная функция управляемого объекта непрерывна, поэтому требуется расчет Z - передаточная функция объекта. Для этого в систему вводится экстраполятор (фиксатор) нулевого порядка с передаточной функцией  Фиксатор нулевого порядка поддерживает амплитуду, измеренную в начале каждого периода квантования, в течение всего периода квантования. В результате блок-схема системы автоматического регулирования принимает вид, показанный на рисунке.  Рисунок 5. Структурная схема дискретной САР Чтобы выбрать тип регулятора, мы определяем соотношение τ/T:  Соотношение 0,2 <τ/T <0,7, поэтому для управления мы используем ПИ-регулятор. Редуцированная непрерывная часть системы представляет собой последовательную запись в память сигнала нулевого порядка и объекта с заданной передаточной функцией:  Передаточная функция Z редуцированной части рассчитывается по следующей формуле:  Поэтому Z- функция редуцированной части принимает вид:  Передаточная функция дискретного ПИ-регулятора имеет вид:  Передаточная функция разомкнутой системы:  Производя замену  Мы получаем комплексную частотную характеристику (КЧХ) или амплитудно-фазовую частотную характеристику открытой системы (АФЧХ):  Поскольку T = 1, частота может быть изменена в пределах [0;π] при построении АЧХ. Согласно номограммам Солодовникова, при известном значении допустимого перерегулирования σ0=10%, Pmax = 1,07, модуль L=24, фазовый запас γ=62 и Md = 1,1 [1]. На комплексной плоскости строится окружность:  Радиус этой окружности определяется по формуле:  Центр окружности находится в точке O:  КЧХ строится на том же графике, что и запретная зона. В этом случае Tp устанавливается, а Kp выбирается таким образом, чтобы КФХ касался запрещенной зоны, но не выходил за ее пределы. Оптимальные значения - это те, при которых отношение Kp/Tp наибольшее. Интервал изменения Тр находится между 2 и 6, так как наибольшее значение Кр/Тр приходится на Тр =3,2. Давайте выберем шаг 0,4. Значения настроек ПИ-регулятора
Поэтому оптимальные настройки: Kp opt = 0,829; Tropt = 3,2. Чтобы убедиться в том, что полученные настройки оптимальны, необходимо рассчитать прямые и косвенные показатели качества: Косвенные показатели качества определяются по частотной характеристике замкнутой системы (рис.). 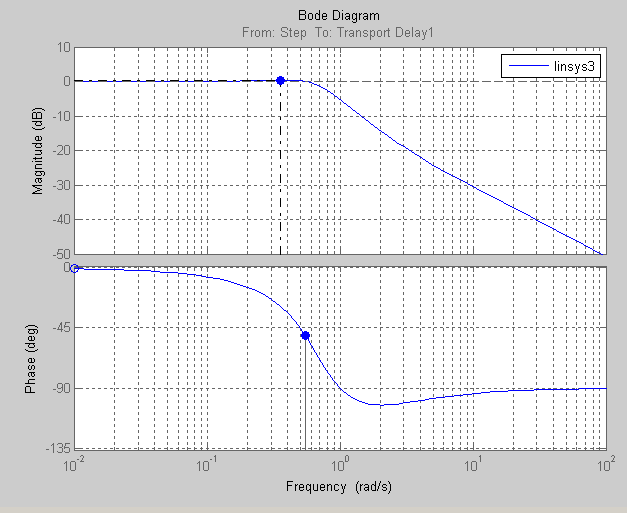 Рисунок 6. Амплитудно - частотная характеристика замкнутой системы с настройками ПИ-регулятора Kp opt = 0.829, Tр opt = 3.2. Фактическое значение экспоненты частоты колебания  , т.е. расчет можно считать удовлетворительным. , т.е. расчет можно считать удовлетворительным.Прямые показатели качества определяются переходным поведением закрытой системы (рис.). 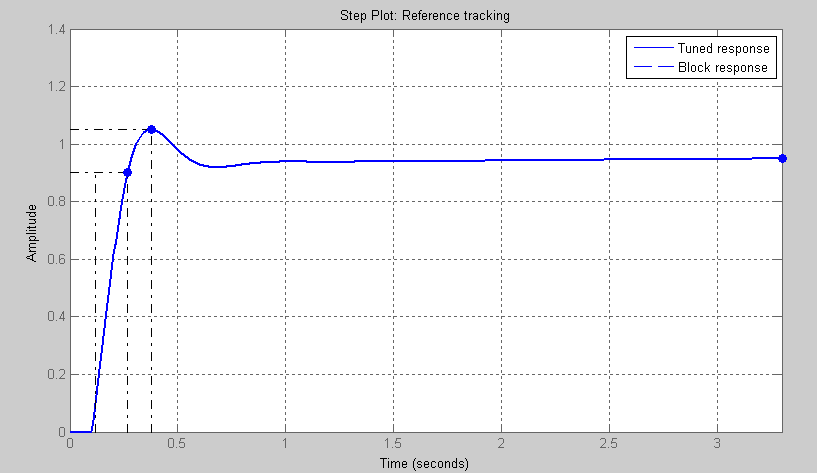 Рисунок 7. График переходной характеристики замкнутой системы при настройках ПИ-регулятора Кр опт = 0.829, Тр опт =3.2 Прямые показатели качества: перерегулирование σфакт =9.3% < σдоп =10%; время регулирования tp=9 сек < tдоп =12 сек. Так как полученные показатели качества управления меньше допустимых, настройки ПИ-регулятора можно считать оптимальными. |