расчет рамы методом сил. Имеет
 Скачать 201.64 Kb. Скачать 201.64 Kb.
|

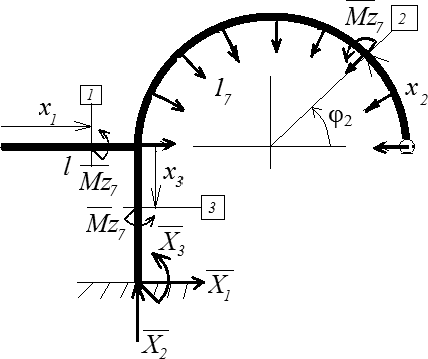
j dxMziMz 2 1 l EJz j dxMziMz 3 l EJz j dx3 2 определение сразу позволяет сделать вывод, что податливости имеющие индексы неподвижных направлений тождественно равны 0.  Рис. 4. Вспомогательная система Таким образом, система канонических УРП приобретает вид: δ44X4+ δ45X5+ δ46P6+ δ47q7 = Δ4 = 0 δ54X4+ δ55X5+ δ56P6+ δ57q7 = Δ5 = 0 По числу КП видно, что единичные силы необходимо будет прикладывать в 4, 5, 6 и 7 направлениях, т.е. потребуются четыре вспомогательные системы: 4-я, 5-я, 6-я и 7-я ВС. Результаты работы с этими ВС удобно свести ив таблицу 1. Процедура вычисления КП предполагает определение значений внутренних сил в поперечных сечениях и интегрирование по длине всех стержневых элементов конструкции в виде т.е. в виде трёх интегралов для каждого участка.
Построение эпюр изгибающих моментов На каждом участке обозначено поперечное сечение с соответствующим номером, направлением движения x и внутренний изгибающий момент Mz, на оси которого будут записываться уравнения равновесия для выделенной (отсечённой) координатой x части участка. В правой колонке таблицы 1. выписаны уравнения равновесия и соответствующие выражения для Mz. Таблица 1. В данном случае при определении значений Mz участки были выбраны так, что отпала необходимость в определении значений реакций опоры. Полученные выражения Mz переносятся в таблицу 2. 
Таблица 2.
Запишем выражения для всех необходимых КП: |