расчет рамы методом сил. Имеет
 Скачать 201.64 Kb. Скачать 201.64 Kb.
|

l Mz Mz56 5 6 dx1 5 6 dx2 5 6 dx3 0 EJz 0 EJz 0 EJz l Mz MzlMzMz l Mz Mz57 5 7 dx1 5 7 dx2 5 7 dx3 0 EJz 0 EJz 0 EJz
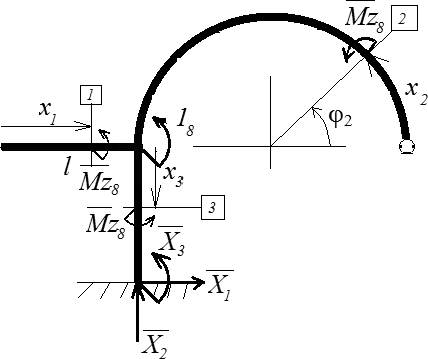
Система уравнений приобретает вид δ44X4+ δ45X5+ δ46P6+ δ47q7 = 0 δ54X4+ δ55X5+ δ56P6+ δ57q7 = 0 X1 = X2= X3 = X4 = X5 = Решение системы УРП и УР даёт: Определение перемещений в статически неопределимой системе представляет не менее важную задачу, поэтому этот аспект рассмотрим подробнее. Если искомое перемещение уже есть в списке перемещений вектора {Δ} и входит в систему УРП, например δ64X4+ δ65X5+ δ66P6+ δ67q7 = Δ6 Рис. 6. 8-я вспомогательная система В таблице 3 заполняется незаполненная в таблице 2 колонка, которая и была предусмотрена под новую ВС. то остаётся только вычислить недостающие податливости и подставить найденные значения неизвестных сил. Если же искомого перемещения нет среди имеющихся (пронумерованных), то необходимо дать новому перемещению (и соответствующей силе) следующий номер по порядку и записать новое уравнение УРП. Поскольку все действующие силы уже должны иметь номера, то речь идёт о формальном введении новой силы, значение которой по условию эквивалентности должно быть равно нулю. На рис 5. изображена ЭС, в которой необходимо определить угол поворота в месте соединения всех участков. Для этого приложен нулевой момент 08. Автоматически это позволяет записать уравнение для 8-го перемещения.
Вычисляются 4 новых интеграла податливостей: Таблица 3. |