Общее ДЗ. Испытания, наладка сельскохозяйственного квадрокоптера
 Скачать 0.74 Mb. Скачать 0.74 Mb.
|

|
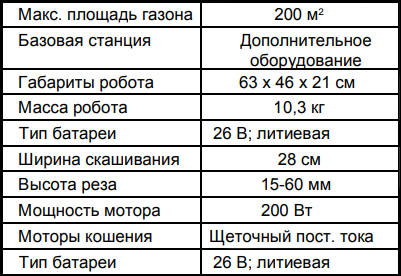
МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ РОССИЙСКОЙ ФЕДЕРАЦИИ Федеральное государственное автономное образовательное учреждение высшего образования «ЮЖНЫЙ ФЕДЕРАЛЬНЫЙ УНИВЕРСИТЕТ» Колледж прикладного профессионального образования Специальность 15.02.10 Мехатроника и мобильная робототехника (по отраслям) Домашнее задание по теме: «Испытания, наладка сельскохозяйственного квадрокоптера» ПМ.02. ТЕХНИЧЕСКОЕ ОБСЛУЖИВАНИЕ, РЕМОНТ И ИСПЫТАНИЕ МЕХАТРОННЫХ СИСТЕМ специальность 15.02.10 Мехатроника и мобильная робототехника Выполнили: Студенты группы М –29 Новикова В.Р. Заворотный И.С Курманова А.И. Проверил: к.т.н, доц. кафедры ЭиМ Полуянович Н.К Таганрог 2022г. СодержаниеВведение 2 5 1 Анализ технического задания 5 2 Разработка структурной схемы робота-газонокосилки 6 2.1 Функционально – модульная схема 6 2.2. Структурная схема 7 3. Выбор элементов системы 8 3.1. Выбор двигателя 8 42BYGH34 10 28YBJ-48 10 42BYGH40 10 11 Для шагового и полушагового режима (Табл. 3): 11 Таблица 3 11 3.2. Выбор драйвера 12 Рисунок 6. Драйвер L298N/2A Рисунок 7. Драйвер TB6612 13 Драйвер L298N/2A был выбран из-за того, что по сравнению с драйвером TB6612 у него более высокое напряжение, которое нам подходит из-за не малого кол-ва элементов в газонокосилке и в целом по характеристикам данный драйвер превосходит многие подобные модели. 13 3.3. Выбор датчика препятствия 13 Ультразвуковые датчики 14 Акустические датчики присутствия 14 Инфракрасные датчики присутствия 15 Радиус обнаружения (R) – основная характеристика устройства. Принцип действия приборов основан на фиксации изменений потока инфракрасных (ИК) лучей в результате перемещений человека. Его пребывание распознается по большей интенсивности (в сравнении с предметами интерьера) излучения, которое напрямую зависит от температуры тела. Основные детали датчика – фотоэлементы и мультилинза, состоящая из большого числа сегментов – маленьких линз. Каждая из них направляет попадающие в неё лучи на фотоэлемент. Двигаясь, человек оказывается в зонах контроля разных сегментов. Свет на фотоэлементе то исчезает, то появляется, генерируя электрический сигнал. 15 Ультразвуковой датчик не подходит для газонокосилки из-за того, что он будет воспринимать траву как помехи. 15 Акустический датчик присутствия не подходит для газонокосилки из-за того, что он будит воспринимать шумы от газонокосилки как препятствии. 15 Поэтому был выбран инфракрасный датчик препятствия, который в сравнении с другими датчиками имеет лишь один недостаток - неточность функционирования на открытых пространствах. 15 Подключение датчика YL-63 к Arduino. 18 Заключение 19 https://vyborok.com/rejting-luchshih-robotov-gazonoko.. 2. Robotobzor: Роботы-газонокосилки: как они устроены и как работают 20 ВведениеРобот-газонокосилка – это автономный робот, предназначенный для скашивания и измельчения травы и мелкого кустарника на придорожных обочинах, склонах, железнодорожных откосах и прочих труднодоступных зонах. Актуальность робота-газонокосилки заключается в том, что данный робот может самостоятельно косить и выравнивать газон почти бесшумно и незаметно, в отличии от ручных газонокосилок. Это очень облегчает жизнь людей и дает им больше свободного времени. Научная новизна робота заключается в том, что предлагается вариант нового схемного решения. Практическая значимость заключается в том, что роботизированная газонокосилка умеет не только равномерно подстригать траву, регулируя высоту в зависимости от ее состояния или от погодных условий, но и проводить аэрацию (насыщение газона кислородом). Это препятствует пересыханию почвы. Помимо аэрации устройству доступна функция мульчирования. Эта полезная способность заключается в измельчении уже скошенной травы и переработке ее в натуральное удобрение. Уровень роботизации на сегодняшний день достаточно высок в промышленности. Это связано с тем, что выполняемые операции имеют высокий уровень повторяемости и легко реализуются в алгоритмах. Многие операции заменены автоматизированными системам. Но в сельском и жилищно-коммунальном хозяйствах уровень автоматизации недостаточно высок, и она только начинает применяться. Это связано с тем, что формализуемость задач в этих отраслях трудновыполнима. В то же время, с появлением современных алгоритмов с элементами искусственного интеллекта уровень обучаемости таких машин постоянно повышается, и объемы выполняемых работ с помощью автоматизированной робототехники будут только расти. Автоматизация технологических процессов значительно повышает производительность труда, снижает численность рабочего и обслуживающего персонала, улучшает условия труда, повышает качество выпускаемой продукции и снижает её себестоимость, увеличивает производительность оборудования, снижает уровень брака, повышает эффективность ведения технологических процессов. Автоматизация положительно влияет на эффективность развития отраслей народного хозяйства. В сельском хозяйстве автоматизация представляет собой важный фактор, влияющий на повышение производительности труда и снижение себестоимости продукции. Основу электрификации составляет применение в работе машин, аппаратов, агрегатов и устройств на базе электрических двигателей. Таким образом, ручной труд заменяется автоматическим. Одно из устройств, применяемых в сельском хозяйстве – это роботизированная-газонокосилка. Вся работа робокосилки происходит почти незаметно и бесшумно. Единственное доказательство того, что на участке работал робот – аккуратно и ровно подстриженный травяной покров. Хозяин газонокосилки может в любой момент остановить робота и перенаправить его на другую площадку либо изменить режим работы. Обычные модели управляются с базовой станции, а модели премиум-класса могут даже управляться с помощью смартфона из любой точки мира. Рассматриваемые автоматизированные газонокосилки на отечественном рынке появились сравнительно недавно, но уже завоевали популярность у определенных слоев населения. Помимо своей полной автономности, они еще способны и качественно срезать траву: отработанные стебли травы не разлетаются во все стороны по участку (как у ручных бензиновых косилок), а остаются аккуратной дорожкой позади робота и в скором времени превращаются в полезное удобрение. Режущий блок у них крутится очень быстро, поэтому скошенная трава трансформируется в крайне мелкую нарезку (эффект мульчирования), соответственно, отсутствует необходимость убирать потом срезанные стебли. Функционируют робокосилки от аккумуляторных батарей. Искусственный интеллект самостоятельно рассчитывает будущую нагрузку в зависимости от условий заданного хозяином сценария (высота травы, площадь обработки) и в случае, если ему будет недостаточно заряда, то он своевременно подъедет на базу для подзарядки, после чего продолжит выполнение программы. В то же время стоит отметить, что даже в бюджетных моделях применяются довольно мощные аккумуляторы. Таблица 1. | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||

| Модель | Рабочее напряжение, В | Крутящий момент, H*см | Режим шага | Угол шага двигателя, °/шаг | Диаметр вала, мм |
42BYGH34 | 12 | 0.3; | полный шаг | 1.8 | 5 |
28YBJ-48 | 5 | 1.6 | полушаговый | 11.25 | 20 |
42BYGH40 | 2.8 | 2 | полный шаг | 1.8 | 8 |
| 39HS34124 | 4 | 3,2 | полушаговый | 2.5 | 26 |
Сравнительная таблица шаговых двигателей. Таблица 2.
Из таблицы 1 видно, что наиболее подходящим двигателем является 28YBJ-48. Он имеет напряжение не более 5В, имеет небольшие габариты и крутящий момент, необходимый для робота-газонокосилки. Учитывая то, что газонокосилка имеет два колеса, то и двигателей необходимо тоже два. А также, нужен третий двигатель для лезвия, которое скашивает траву.

Рисунок 3. Шаговый двигатель 28YBJ-48

Рисунок 4. Принципиальная схема шагового двигателя 28BYJ-48.
Подавая сигналы в определённом порядке на выводы двигателя, двигатель можно вращать по часовой стрелке.
Для шагового и полушагового режима (Табл. 3):
Таблица 3
| Контакт мотора | Фазы для полушагового режима | Фазы для шагового режима | |||||||||||
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 1 | 2 | 3 | 4 | ||
| Оранжевый | + | + | | | | | | + | + | + | | | |
| Жёлтый | | + | + | + | | | | | | + | + | | |
| Розовый | | | | + | + | + | | | | | + | | |
| Синий | | | | | | + | + | + | + | | | | |
Чтобы подключить шаговый двигатель к Arduino, необходимо использовать драйвер. Двигатель подключается к платформе с помощью драйвера, следовательно, т. к. разрабатываемая газонокосилка имеет два двигателя, то и драйвера нужно два.
Пример подключения шагового двигателя 28YBJ-48 представлен на рисунке 5:
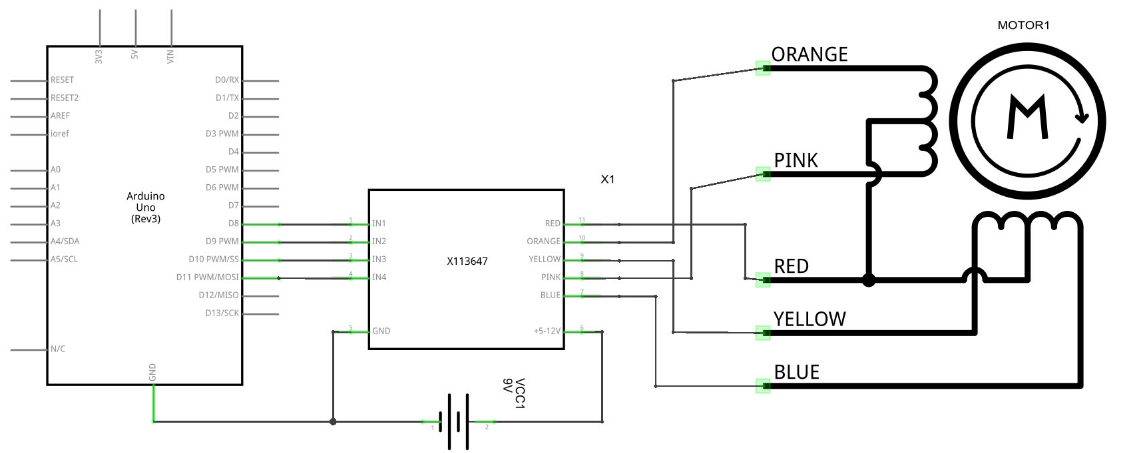
Рисунок 5. Подключение шагового двигателя 28YBJ-48 к Arduino.
3.2. Выбор драйвера
Выбрать драйвер намного легче, чем двигатель или датчики. В связи с тем, что в данном устройстве используются двигатели 28YBJ-48, то, чаще всего, вместе с ними используются драйвера L298N/2A (Рис. 6), которые подходят под технические характеристики двигателя.
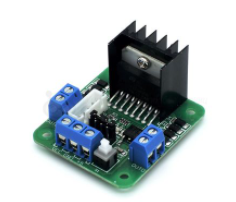
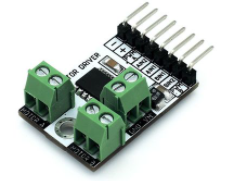
Рисунок 6. Драйвер L298N/2A Рисунок 7. Драйвер TB6612
Технические характеристики драйвера L298N/2A:
- напряжение питания управляемой части (постоянный ток): 5-35В
- входное напряжение логической части (Vd): 6-12В
- рабочий выходной ток на канал двигателя: 2А
- максимальный пиковый ток: 3А
- максимальная потребляемая мощность: 20 Вт
- возможность использования ШИМ
Сравнительная модель и ее характеристики представлены ниже (Рис. 7):
Технические характеристики драйвера TB6612:
- напряжение питания управляемой части (постоянный ток): 3-15В
- входное напряжение логической части (Vd): 3-9В
- рабочий выходной ток на канал двигателя: 2А
- максимальный пиковый ток: 3А
- максимальная потребляемая мощность: 17 Вт
- возможность использования ШИМ
Драйвер L298N/2A был выбран из-за того, что по сравнению с драйвером TB6612 у него более высокое напряжение, которое нам подходит из-за не малого кол-ва элементов в газонокосилке и в целом по характеристикам данный драйвер превосходит многие подобные модели.
3.3. Выбор датчика препятствия
Для того, чтобы газонокосилка работала исправно и была защищена от столкновений необходимо, чтобы она могла ориентироваться в пространстве. Для этого необходимо, чтобы в ней были встроены датчики обнаружения препятствий.
Датчик препятствия – электронный прибор, регистрирующий бесконтактными методами объекты определенного класса на территории своего контроля. В зависимости от результатов регистрации он может коммутировать электрические импульсы, по сигналам которых другие устройства выполняют различного рода действия.
Существует множество видов датчиков препятствий, рассмотрим некоторые из них и определим самый подходящий:
Ультразвуковые датчики
Испускают и принимают волны, не улавливаемые человеческим ухом (частотой порядка 200 кГц).
Недостатки:
низкая дальность (верхний порог) фиксации;
ненадежность регистрации объектов из мягких материалов (ткань, пористая резина, трава);
наличие “слепой зоны” (нижнего порога обнаружения).
Акустические датчики присутствия
В них посредством пьезоэлектрических материалов происходит преобразование звуковой волны в электрический сигнал.
Недостатки:
необходимость использования усилителей;
вероятность ложных срабатываний в результате внешних и внутренних шумов (резкие звуки с улицы, включение радио, телефонные звонки, шумы самой газонокосилки).
Инфракрасные датчики присутствия
Радиус обнаружения (R) – основная характеристика устройства. Принцип действия приборов основан на фиксации изменений потока инфракрасных (ИК) лучей в результате перемещений человека. Его пребывание распознается по большей интенсивности (в сравнении с предметами интерьера) излучения, которое напрямую зависит от температуры тела. Основные детали датчика – фотоэлементы и мультилинза, состоящая из большого числа сегментов – маленьких линз. Каждая из них направляет попадающие в неё лучи на фотоэлемент. Двигаясь, человек оказывается в зонах контроля разных сегментов. Свет на фотоэлементе то исчезает, то появляется, генерируя электрический сигнал.
Ультразвуковой датчик не подходит для газонокосилки из-за того, что он будет воспринимать траву как помехи.
Акустический датчик присутствия не подходит для газонокосилки из-за того, что он будит воспринимать шумы от газонокосилки как препятствии.
Поэтому был выбран инфракрасный датчик препятствия, который в сравнении с другими датчиками имеет лишь один недостаток - неточность функционирования на открытых пространствах.
Т. к. робот – газонокосилка определяет препятствия с каждой из сторон, то ему необходимо подключить 4 инфракрасных датчика препятствия. Место расположения датчиков указана на рисунке 8.
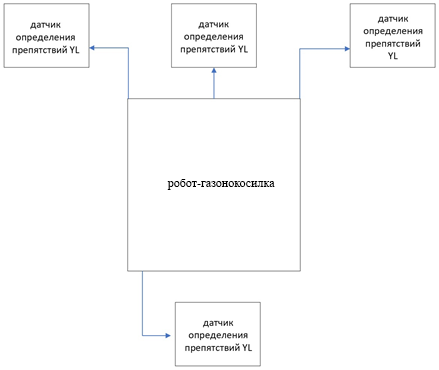
Рисунок 8. Расположение датчиков препятствий.
Он применяется тогда, когда нужно определить наличие объекта, а точное расстояние до объекта знать необязательно. Датчик состоит из инфракрасного излучателя, и фотоприемника. ИК источник излучает инфракрасные волны, которые отражаются от препятствия и фиксируются фотоприемником. Датчик обнаруживает препятствия в диапазоне расстояний от нуля до установленной предельной границы. Он построен на основе компаратора LM393, который выдает напряжение на выход по принципу: обнаружено препятствие –логический уровень HIGH, не обнаружено – логический уровень LOW, данное состояние показывает и находящийся на датчике красный светодиод. Для индикации питания на датчике установлен зеленый светодиод. Датчик применяется в робототехнике для обнаружения препятствий при движении колесных или гусеничных роботов.
Технические характеристики YL-63, RM-34 указаны в (табл.4)
Таблица 4
| Технические характеристики | Модель | Модель |
| YL-63 | RM-34 | |
| напряжение питания (В) | 3.3–5 | 3.3–5.5 |
| расстояние обнаружения препятствий (см) | 2 – 30 | 2-15 |
| эффективный угол обнаружения препятствий (°) | 35 | 30 |
| светодиод индикации питания | + | + |
| светодиод индикации срабатывания | + | + |
| Размеры (мм) | 43 х 16 х 7 | 42 х 15 х 9 |
| Потребляемый ток (мА) | 8 | 10 |
Благодаря сравнению характеристик различных моделей датчиков был выбран цифровой инфракрасный датчик обхода препятствий YL-63 (Рис.9).

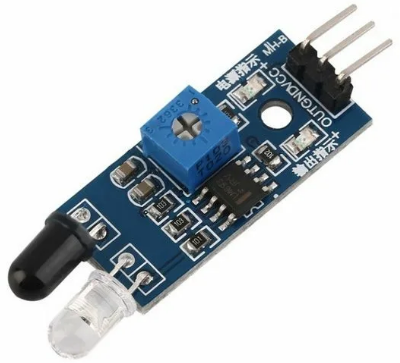
Рисунок 9. Датчик YL-63 Рисунок 10. Датчик RM-34
Подключение датчика YL-63 к Arduino.
Модуль имеет 3 вывода:
VCC — питание 3-5 В;
GND — земля;
OUT — цифровой выход.
Схема подключения датчик к плате Arduino (Схема соединений на рис. 11)
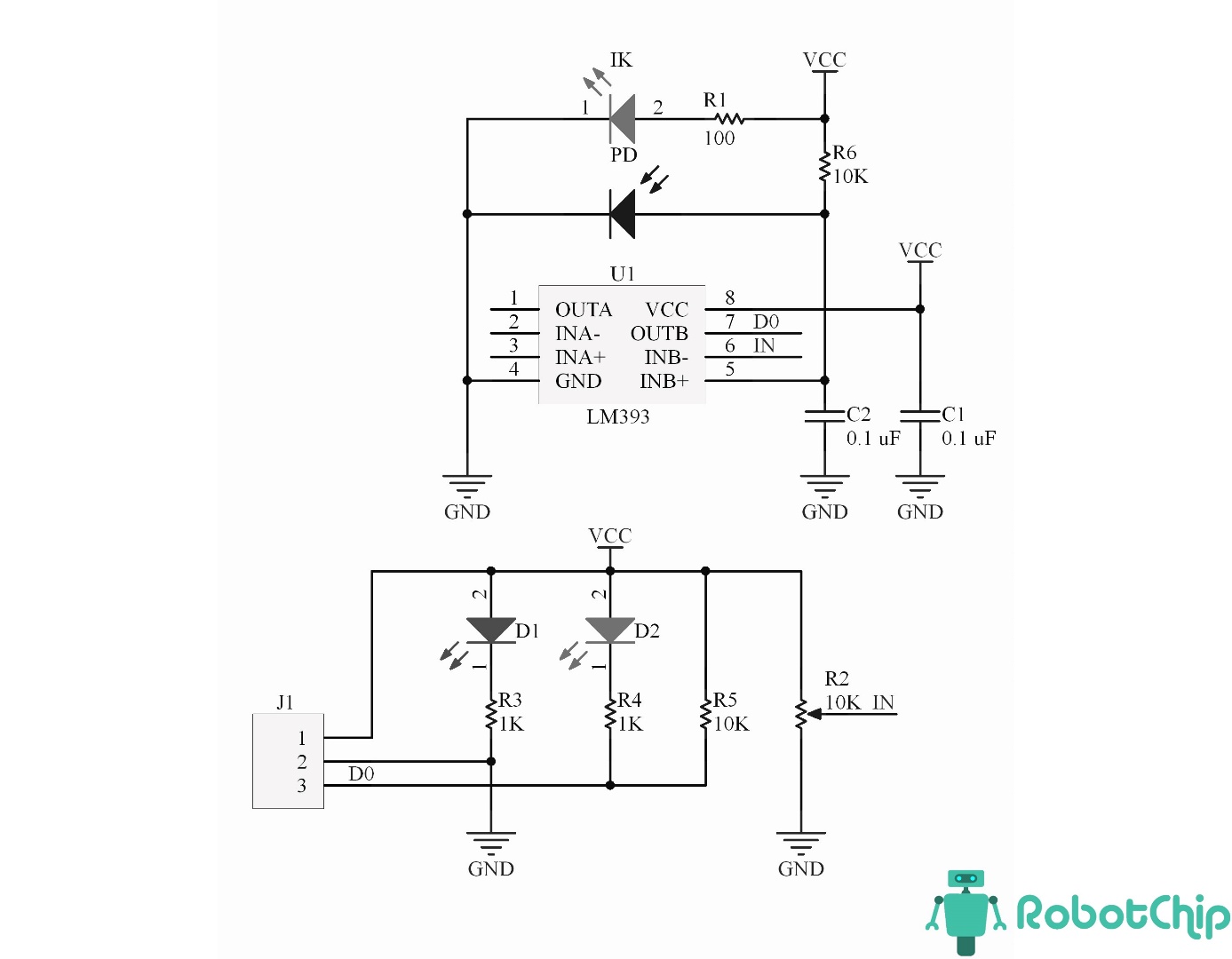
Рисунок 11. Схема подключения датчика YL-63 к плате Arduino
Суммарные затраты на макет робота-газонокосилки предоставлены в (табл.5)
Таблица 5.
| Название элемента | Количество | Цена |
| Инфракрасный датчик препятствий | 3 шт. | 1 170 руб. |
| Шаговый двигатель | 3 шт. | 780 руб. |
| Драйвер | 1 шт. | 420 руб. |
| Колесо | 3 шт. | 320 руб. |
| АКБ | 2 шт. | 1 780 руб. |
| Макетная плата | 1 шт. | 190 руб. |
| Провода «папа-мама» | 20 шт. | 100 руб. |
| Итог | 4 760 руб. | |
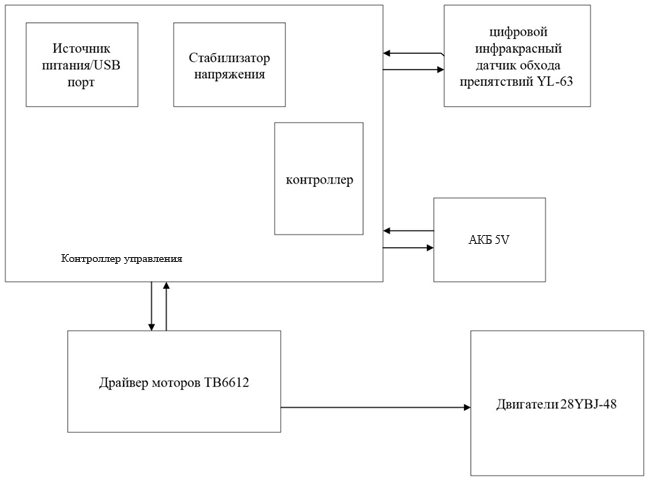
В процессе написания курсовой работы, была выбрана модель робота газонокосилки МС 150, по которой был разработан макет робота, приведены структурные и функциональные схемы робота. Также, был произведен выбор элементов и написаны к ним коды. Разработав структурную схему используя блок управления, можно настроить робота за пару минут, и он будет готов косить газоны даже со сложным рельефом. Был выбран инфракрасный датчик расстояния он применяется тогда, когда нужно определить наличие объекта, а точное расстояние до объекта знать необязательно. Датчик состоит из инфракрасного излучателя, и фотоприемника. ИК источник излучает инфракрасные волны, которые отражаются от препятствия и фиксируются фотоприемником. Было принято решение, что инфракрасный датчик лучше подходит под данный тип роботов т. к. его сигналы не будут рассеиваться и отталкиваться от листьев травы создавая тем самым помехи. Для подключения двигателей было принято решение использовать драйвер для задания и считывания точного количества шагов шагового двигателя.
Список источников
1. Рейтинг лучших роботов газонокосилок на 2022 год:
https://vyborok.com/rejting-luchshih-robotov-gazonoko..
2. Robotobzor: Роботы-газонокосилки: как они устроены и как работают
https://robotobzor.ru/o-robotah/roboty-gazonokosilki.html
3. Элементы роботов-газонокосилок:
http://earchive.tpu.ru/bitstream/11683/47070/1/confer..
4. Выбор шагового двигателя
http://geekmatic.in.ua/vibor_shagovogo_dvigatelia
5. Подключение шаговых двигателей к платформе Arduino
https://arduinomaster.ru/motor-dvigatel-privod/shagovye-dvigateli-i-motory-arduino/
6. Технические характеристики шаговых двигателей
http://earchive.tpu.ru/bitstream/11683/48550/1/TPU562731.pdf
7. Выбор драйвера для робокосикол
https://www.robot72.ru/files/files/Robomow%20RS%20Manual%202014%20RUS.pdf
8. Современные промышленные технологии. Роботизированные газонокосилки:
http://earchive.tpu.ru/bitstream/11683/47070/1/conference_tpu-2018-C57_p8-10.pdf
9. SmartElement. Компоненты для робототехники и электроники.
https://smartelements.ru/collection/nabory/product/nabor-elektronik