Путилин диплом.. Использование радиолокационной станции судна
 Скачать 5.22 Mb. Скачать 5.22 Mb.
|

|
Таблица 8. Предварительный расчет перехода Муром (220км) – Дмитриевы горы (284км)
Участок 1. Муром - Перекат Нижний Панфиловский (220 км-225 км) Перекат Нижний Панфиловский лимитируют габариты судового хода. Участок 2. Перекат Нижний Панфиловский - Перекат Верхней Литвинский (225 км - 235 км) Перекат Нижний Панфиловский, Перекат Верхней Литвинский лимитируют габариты судового хода. На 225 км в летнее время действует паромная переправа. Возможно наведение понтонного моста. При подходе к этому участку следует соблюдать осторожность. Участок 3. Верхней Литвинский - Верхние Решенские Огрудки (235 км-245 км) Ложе перекатов Верхние Змейские Огрудки, Средние Змейские Огрудки и Нижние Змейские Огрудки каменистое. Расхождение судов и составов на этих участках запрещено. Участок 4. Верхние Решенские огрудки - Перекат Шиморские огрудки. Ложе перекатов Верхние Решенские Огрудки, Нижние Решенские Огрудки, Перекат Шиморские Огрудки каменистое, русло извилистое. Расхождения судов на перекатах Верхние Решенские Огрудки, Нижние Решенские Огрудки, Перекат Шиморские запрещены. На перекатах Верхняя Глинка и Нижняя Глинка расхождения не рекомендованы. При движении по этим перекатам следует соблюдать осторожность, держаться середины судового хода и принимать меры к сглаживанию рыскливости. На перекате Нижние Решенские Огрудки у правого берега расположена полузапруда. Участок 5. Перекат Шиморские Огрудки - Перекат Ляховский. В затон Шиморский ведется дополнительный судовой ход, ответвляющийся от основного судового хода на 258 км. Якорное место находится на участке 257,6-256,6 км за левой кромкой судового хода, оно предназначено для сухогрузных судов. При подходе к излучинам Ляхи необходимо руководствоваться Правилами плавания судов по внутренним водным путям пункты 122, 150. Участок 6. Перекат Ляховской – Перекат Нижний Воютинский. На перекате Нижний Воютинский у левого берега имеются три полузапруды с низкими отметками на гребнях, огражденные белым буем. Следует учитывать, что правый правый берег в районе переката Нижний Казневский укреплен каменной дамбой, на 268 км от правого берега выступает печина. Участок 7. Нижний Воютинский – Дмитриевы горы. Следует иметь в виду, что у левого берега на 284-281 км имеются гравийные высыпки из ручьев. На 278,8 км от основного хода ответвляется весенний судовой ход, ведуший в станицу Черный Яр, которая судоходна в период весеннего половодья на расстоянии 12 км от устья. 2.4. Анализ особенностей использования судовой радиолокационной станции при прохождении маршрута Муром – Дмитриевы горы на теплоходе «Бородино» 28 мая 2022 года, 21:30 по МСК, теплоход «Бородино» отшвартовалось от пассажирского причала Муром и пошел вверх по течению. Видимость была 3-5 км, ветер юго-запад 3-4м/с. Плавание по маршруту проходило в соответствии с Правилами плавания на внутренних водных были выполнены следующие действия: - на ходовом мостике находились рулевой и вахтенный начальник теплохода. - было настроено постоянное слежение на радиоканале, предназначенном для передачи сообщений о бедствии, безопасности судоходства, а также согласования взаимных действий судоводителей и обмена информацией с береговыми службами; - была включена ночная сигнализация для обозначения своего судна на маршруте.22 Перед началом движения была включена радиолокационная станция Furuno М-1824C для безопасного прохождения маршрута в сумерках. При подготовке радиолокационной станции к работе необходимо её настроить. Что бы включить РЛС нужно нажать кнопку POWER/BRILL (включение, выключение) при включении прибора появляется экран инициализации (См.Рис.8-10), а затем стартовый экран.  Рисунок 8. Экран инициализации радиолокационной станции Furuno M-1824С Во время тестирования локатор бездействует, проверяя правильность функционирования ПЗУ и ОЗУ. После выполнения самопроверки на экране появляется азимутальная шкала и цифровой таймер. Цифровой таймер отсчитывает время, оставшееся до окончания разогрева магнетрона, излучающий радиоволны.  Рисунок 9. Радиолокационная станция Furuno M-1824С при включении После всех манипуляций с включением локатора должен звучать сигнал, который нужно подтвердить кнопкой ALARM. После чего нужно нажать кнопку CLEAR стирая выбранные маркеры. Последовательным нажатием программируемой клавишей TARGNET был выбран нужный режим представления - режим Истинного Движения, когда собственное судно и другие движущиеся объекты перемещаются со своими истинными курсами и скоростями. В данном режиме все неподвижные цели, например берега, представлены неподвижными эхосигналами. После чего на индикаторе отображаются данные навигационной обстановки, в соответствии с которыми корректировался курс. 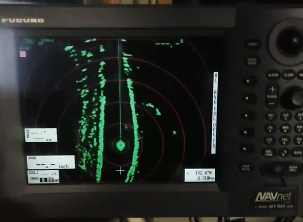 Рисунок 10. Радиолокационная станция Furuno M-1824С в работе Во время прохождения маршрута на мостике находились рулевой и вахтенный начальник. Вахтенный начальник отдавал приказы рулевому, а также наблюдал за станцией Furuno M-1824С и навигационной обстановкой в целом обеспечивая безопасную вахту в ночное время. На протяжении всего маршрута сложным участком были Верхние Решенские огрудки, Нижние Решенские огрудки, перекат Шиморские огрудки, перекат Ляховский, Нижний Воютинский, перекат Нижняя Глинка (См.Рис.11) Габариты судового хода здесь ограничены и возникают свальные течения, а также в русле реки выступают каменистые полузапруды. При следовании по этому маршруту соблюдать осторожность. Прохождение переката Нижняя Глинка (248 км) ночью не обошлось без радиолокационной станции Furuno M-1824С, которая обеспечила возможность уточнить обстановку впереди судна. Пользуясь данными радиолокационной станции корректировались скорость судна и курс.  Рисунок 11. Перекат Нижняя Глинка (248 км) Экран РЛС 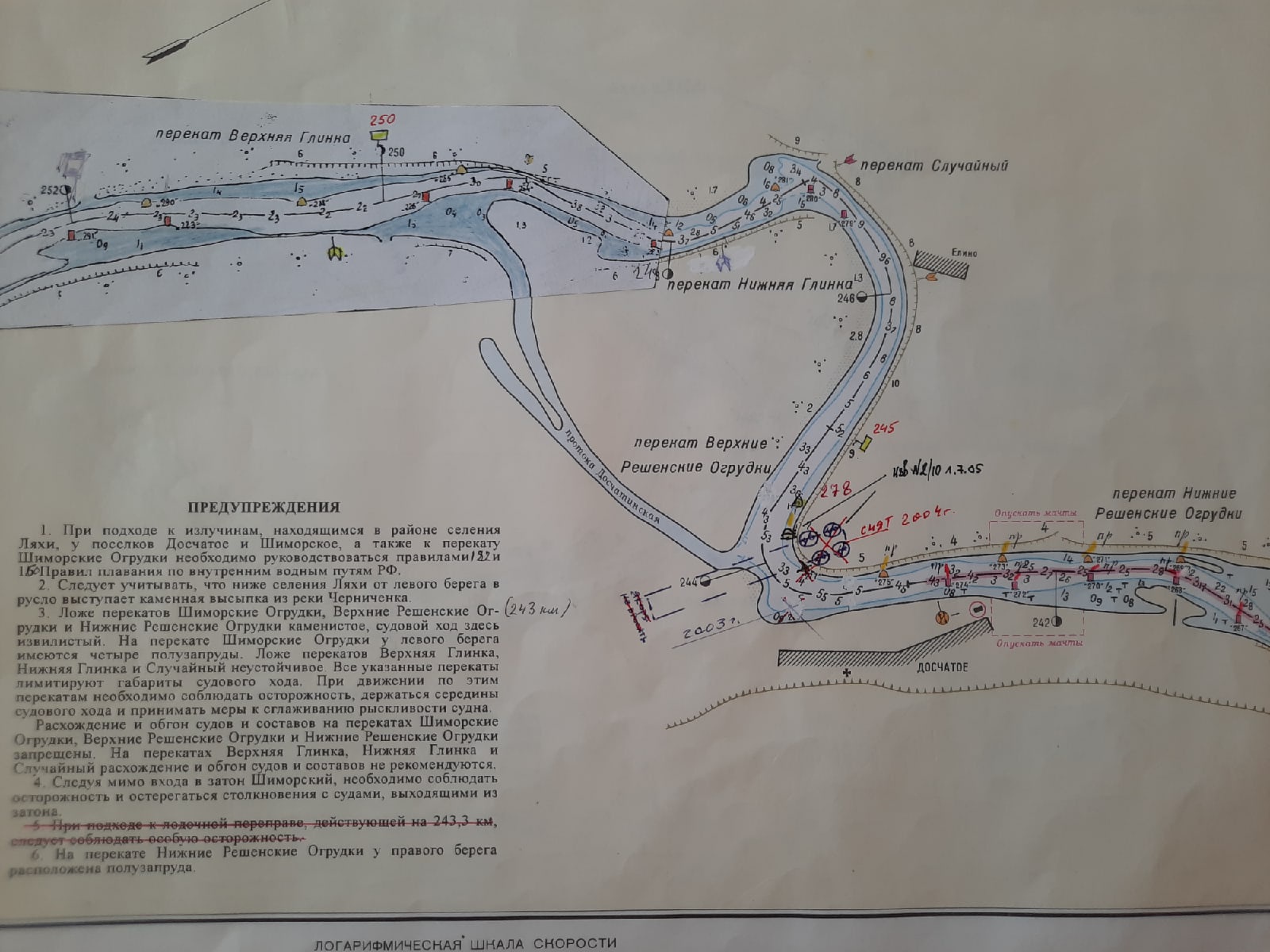 Рисунок 14. Нижняя Глинка перекат на 248 км Ход судна был уменьшен, выбранная скорость постоянно корректировалась согласно обстановке. За время несения вахты по прохождению маршрута были выполнены все нормативные правила и указания вахтенного начальника по прохождения маршрута. Неисправности технических средств за время маршрута не наблюдалось. Использование судовой радиолокационной станции позволило обеспечить эффективность и экономическую выгодность рейса при необходимой безопасности плавания. ЗАКЛЮЧЕНИЕ В данной дипломной работе рассмотрено использование радиолокационной станции судна «Бородино» при прохождении участка Муром - Дмитриевы горы. Проанализирована специальная литература: Василенко В.А., Дерябина В. В., Мотрич А.Н., Гагарский Д.А. В результате проделанной работы были изучены история создания и принципы работы радиолокационной станции, специфика определения места с помощью радиолокационной станции, особенности плавания судов в условиях ограниченной видимости, средства автоматической радиолокационной прокладки, организация радиолокационных наблюдений на судах. В ходе работы сделаны следующие выводы: Радиолокация — метод обнаружения в пространстве различных объектов посредством радиоволн. Этот метод реализуется в радиолокационных станциях, действие которых основано на использовании явления отражения радиоволн от различных объектов, расположенных на пути их распространения. Судовая радиолокационная станция — это установленная на судне радиолокационная станция, предназначенная для обнаружения и последующего наблюдения за берегом, судами, льдами и другими объектами, представляющими интерес для судоводителя. Судовая навигационная радиолокационная станция обеспечивает возможность измерять расстояния, пеленги и курсовые углы на объекты и применяется для определения места судна в географической и относительной системах координат при самых разнообразных условиях плавания. В радиолокационной станции используется явление отражения радиоволн от различных объектов, расположенных на пути их распространения. В радиолокации используется явление эха. Радиолокационная станция содержит передатчик, приемник, антенно-волновое устройство, индикатор с экраном для визуального наблюдения эхо-сигналов. Использование радиолокационной станции наиболее эффективно, если радиолокационное наблюдение ведется непрерывно. При таком наблюдении эхо-сигнал цели будет обнаружен сразу же после его появления на экране. Допустимый перерыв между наблюдениями за экраном радиолокационной станции зависит от района плавания, надежной дальности обнаружения вероятных объектов, скорости хода, взаимного положения и относительной скорости сближения судов. В режиме относительного движения наиболее наглядно и просто оценивается опасность столкновения. Место судна с помощью радиолокационной станции определяют по двум, трем расстояниям, пеленгу и расстоянию, крюйс-расстоянию. Каждое судно должно постоянно вести наблюдение и применять все имеющиеся средства в соответствии с условиями плавания для оценки ситуации и определения наличия опасности столкновения. Имеющееся на судне радиолокационное оборудование должно быть исправным и использоваться надлежащим образом. Правило 19 МППСС-72 определяет обязанности судоводителя при плавании судна в условиях ограниченной видимости. В нем говорится, что судно, которое обнаружило присутствие другого судна только с помощью радиолокационных станций, должно определить, как развивается ситуация чрезмерного сближения и существует ли опасность столкновения. Средство автоматической радиолокационной прокладки (САРП) предназначено для предупреждения столкновения судов и подготовки принятия рационального решения по выбору маневра в сложной навигационной обстановке путем непрерывной, точной и быстрой оценки ситуации. Средства автоматической радиолокационной прокладки - это радиолокационно-вычислительные системы, обеспечивающие автоматическое сопровождение эхо-сигналов заданных целей, первичную и вторичную обработку радиолокационной информации, выдачу судоводителю всех данных, необходимых для непрерывной, точной и быстрой оценки навигационной ситуации. Использование радиолокационной станции является обязательным: - при плавании в условиях ограниченной видимости; - при ухудшении видимости (даже предполагаемом); - при подходе судна к области тумана, интенсивных осадков (ливень, шквал, сильные разряды) и тому подобных условий (пыльные бури), ограничивающих визуальную видимость; - при следовании или нахождении у кромки или в виду зоны ограниченной видимости для обнаружения судов, которые могут быть в этой зоне; - в любых условиях видимости при входе в порт или выходе из порта, плавании в стесненных водах или приближении к ним, в районах интенсивного движения или большого скопления судов. Эффективное использование радиолокационной станции для движения в тумане возможно лишь в совокупности с курсоуказателем. Радиолокационное наблюдение следует начинать со шкал малой дальности и только, убедившись, в отсутствии опасности столкновения с близко расположенными судами, радиолокатор следует переключать на шкалы большей дальности. Во второй главе дипломной работы проанализирован опыт использования радиолокационной станции судна «Бородино» при прохождении участка Муром - Дмитриевы горы. Теплоход «Бородино» был построен в 1961 году на заводе "Obuda Hajogyar Budapest" в Венгрии. Проект теплохода был выполнен конструкторским бюро того же завода и утвержден в 1957 году. Длина судна 78 метров, а ширина - 15,2 метра, скорость до 20 км/ч. Его осадка 1,4 м, поэтому преимущество в том, что оно имеет возможность плавания и по мелководным рекам. Теплоход может эксплуатироваться на внутренних водных путях Российской Федерации бассейнов «О», «Р». На «Бородино» установлена самая современная электронная картографическая навигационная система. На теплоходе установлено следующее навигационное оборудование: магнитный компас, радиолокатор, GPS, электронно-картографическая навигационно-информационная система, радиостанция. Была изучена гидрология реки Оки и навигационная обстановка. Маршрут, расстояние которого составило 64 км, был разделен на 7 участков, средняя скорость 10 км/ч, время 5,9 ч. Затруднительные участки в прохождении: Верхние Решенские огрудки, Нижние Решенские огрудки, перекат Шиморские огрудки, перекат Ляховский, Нижний Воютинский. Габариты судового хода здесь ограничены и возникают свальные течения, а также в русле реки выступают каменистые полузапруды, ложе реки каменистое. При следовании по этому маршруту соблюдалась осторожность. Прохождение переката Нижняя Глинка (248 км) ночью не обошлось без радиолокационной станции Furuno M-1824С, которая обеспечила возможность уточнить обстановку впереди судна. Пользуясь данными радиолокационной станции корректировались скорость судна и курс. Ход судна был уменьшен, выбранная скорость постоянно корректировалась согласно обстановке. За время несения вахты по прохождению маршрута были выполнены все нормативные правила и указания вахтенного начальника по прохождения маршрута. Неисправности технических средств за время маршрута не наблюдалось. Использование судовой радиолокационной станции позволило обеспечить эффективность и экономическую выгодность рейса при необходимой безопасности плавания. СПИСОК ЛИТЕРАТУРЫ Василенко В.А. Радионавигационные приборы и системы. – М.: Агропромиздат, 1986. Винокурова В.И. Морская радиолокация. – Л.: Судостроение, 1986. Гагарский Д.А. Электронные картографические системы в современном судовождении. - СПб.: МОРСАР, 2017. Галич И. И. Судовая связь и приборы судовождения. - М.: Государственное союзное издательство судостроительной промышленности, 2007. Гамов, А. Г. Использование радиолокации в судовождении. - М.: Морской транспорт, 1987. Дерябин В.В. Автоматизация судовождения. / Учебное пособие.- М.: Лань, 2018. Дмитриев В. И. Пути повышения безопасности судоходства. – М.: Моркнига,2015. Дмитриев В.И. Безопасность судоходства на внутренних водных путях. – М.: Моркнига, 2018. Дмитриев В.И. Информационные технологические обеспечения безопасности судоходства и их комплексное использование. – М.: Моркнига, 2013. Дмитриев В.И. Навигация и лоция. Навигационная гидрометеорология. Электронная картография. М.: Моркнига, 2018. Дмитриев В.И. Обеспечение безопасности плавания. – М.: Академкнига, 2018. Дмитриев В.И. Управление работой флота. - М.: Моркнига, 2013. Дмитриев В.И., Форафонов В.И. Современные навигационные системы и безопасность судовождения. – М.: Моркнига, 2018. Дмитриев, В. И. Современные навигационные системы и безопасность судовождения / В.И. Дмитриев, В.И. Форафонов. - М.: Моркнига, 2010. Каретников В.В., Лысенко Ю.Н. Технические средства судовождения. / Учебник.- СПб.: Политехнический университет, 2017. Конвенция о Международных правилах предупреждения столкновений судов в море (МППСС-72) (с изменениями на 29 ноября 2001 года). // СПС «Гарант» Коновалов В.В.Судовые радионавигационные приборы. / Учебник для мореходных училищ. - М.: Транспорт, 1989. Маринич А. Н. Современные судовые и береговые радиолокационные станции (радары) отечественных и зарубежных фирм. — Петропавловск-Камчатский: КамчатГТУ, 2012. Мотрич В.Н. Столкновение судов и их предупреждение. Новый вгляд. – СПб.: БХВ – Петербург, 2017. Наставление по организации штурманской службы на судах ВВТ. – М.: МОРКНИГА, 2018. Носенко В.Н. Маневрирование и управление судном. – М.: ИНФРА – М, 2020. Правила радиосвязи на внутренних водных путях РФ. – М.: Моркнига, 2018. Приказ Министерства транспорта Российской Федерации № 19 от 19 января 2018г. «Об утверждении Правил плавания судов по внутренним водным путям». // СПС «ГАРАНТ». Рекомендации для судоводителей по практическому использованию судовой автоматизированной РЛС «Океан-С». // Методические рекомендации.- М.: Мортехинформреклама, 1986. Рекомендациях по организации штурманской службы на судах Минморфлота (РШС – 89). // СПС «ГАРАНТ». Приложение 1 Участок 1. Муром - Перекат Нижний Панфиловский (220 км-225 км) Участок 2. Перекат Нижний Панфиловский - Перекат Верхней Литвинский (225 км - 235 км) |