Лист. Лист 1. Исследование механизмов поршневого насоса двойного действия
 Скачать 2.12 Mb. Скачать 2.12 Mb.
|

|
ТЕХИЧЕСКОЕ ЗАДАНИЕ ПРОЕКТИРОВАНИЕ И ИССЛЕДОВАНИЕ МЕХАНИЗМОВ ПОРШНЕВОГО НАСОСА ДВОЙНОГО ДЕЙСТВИЯ Горизонтальный одноцилиндровый поршневой наосос двойного действия, приминяемый в теплоэнергетике, служит для перекачки воды или тепловых нефтепродуктов. Коленчатый вал I насоса приводится в движение от электродвигателя 12 через муфту II, пару зубчатых колес с числами зубьев Z5 и Z6, планетарный редуктор 6 и коническую зубчатую передачу 5 с передаточным отношением, равным единице (рис. 1 а, б). На выходном валу редуктора установлен маховик 7. При вращении кривошипа I через шатун 2 поршневой шток 3 с поршнем 3*, находящимся в цилиндре 4, получает возвратно-поступательное движение. В процессе работы поршневого насоса двойного действия жидкость вытесняется при движении поршня в обе стороны. При ходе поршня вправо клапаны I и П открыты (рис. 1 6). Через клапан I происходит всасывание, а через клапан П- вытеснение жидкости в напорную трубу. В это время клапаны Ш и IV закрыты. При обратном ходе поршня жидкость через клапан Ш поступает в рабочую камеру, а через клапан IV - в напорную трубу. Таким образом, всасывание и нагнетание жидкости происходят при каждом ходе поршня. Изменение давления Р жидкости в цилиндре от перемещения S3 поршня З* характеризуется индикаторной диаграммой (рис. 1 в). Смазка элементов кинематических пар механизма поршневого насоса осуществляется под давлением от масляного насоса 10, плунжер (толкатель) 13 которого перемещается от кулачка 9, установленного на коленчатом валу I (рис. 1 а, г). Перемещение толкателя осуществляется по закону ad = a1*cos(2*π* φd / φp) . (рис. 1д). 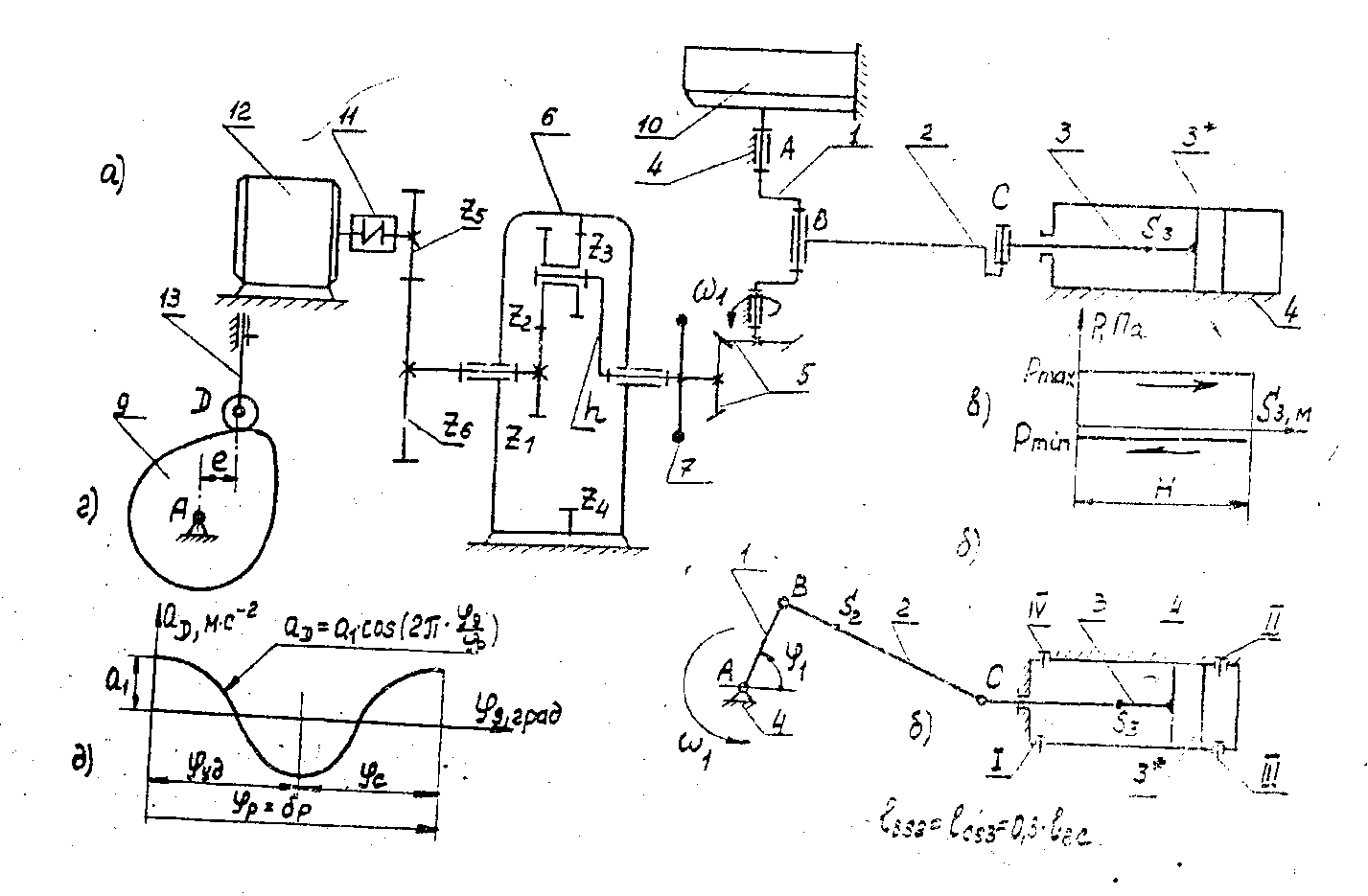 Исходные данные
1. Проектирование основного механизма поршневого насоса и определение закона движения его начального звена 1.1 Проектирование кинематической схемы и определение длин звеньев механизма Средняя скорость поршня Vsr = 0,55 м/c; Частота двойных ходов поршня n1 = 1,5 1/c; Отношение длины шатуна 2 к длине кривошипа 1: λ1 = lBC/lAB = 4,8 м; Положение центра масс шатуна : λ2 = lBS2/lBC = 0,3 м; Длина штока 3 в долях от хода Н: λ3 = l3/H = 1,06 м Определим габариты механизма по синтезу средней скорости. Вычисления были проведены в программе Mathcad. 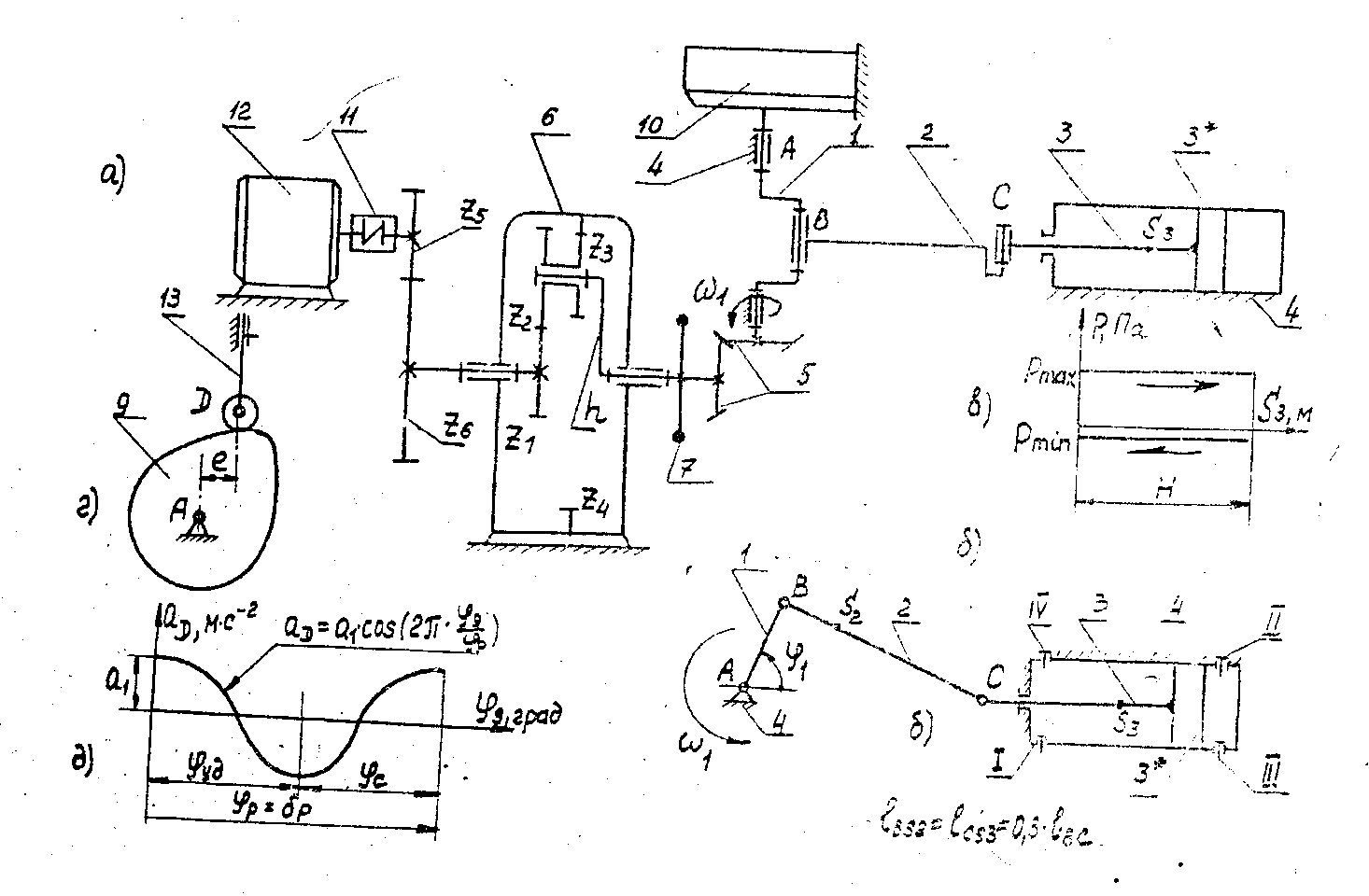 Размеры механизма: lAB = 0,092 м lCB = 0,44 м lBS2 = 0,132 м lCD = 0,194 м Н = 0,183 м На листе вычерчиваем схему механизма. Примем масштаб:  Установим зависимости координат точек B,C, S2, S3 механизма от угла поворота кривошипа. При помощи пакет Mathcad получим кинематическую схему механизма 1.2 Кинематические передаточные функции скорости  Кинематические передаточные функции (аналоги скоростей) – это производные от функции положения по обобщенной координате. Тогда аналогов линейных и угловых скоростей определяем по следующим формулам: Кинематические передаточные функции (аналоги скоростей) – это производные от функции положения по обобщенной координате. Тогда аналогов линейных и угловых скоростей определяем по следующим формулам: ; ;   Вычерчиваем графики на листе 1. 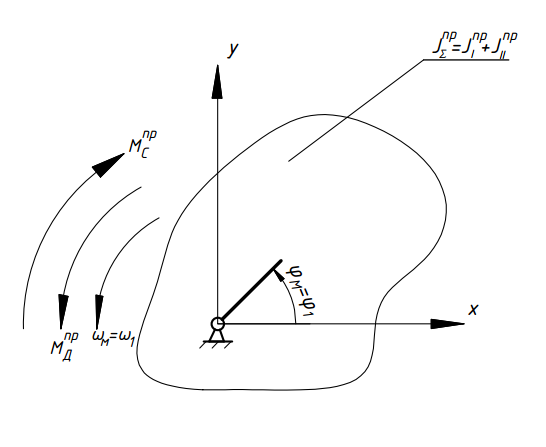 1.3 Выбор динамической модели. 1.3 Выбор динамической модели.Механизм представляет собой сложную систему звеньев, нагруженных различными силами и моментами. Чтобы упростить определение закона движения такой сложной системы, применяют метод приведения сил и масс, который позволяет заменить реальный механизм некоторой эквивалентной (расчетной) схемой - одномассовой динамической моделью механизма. Вращающееся звено динамической модели двинется так, что его координата M совпадает в любой момент времени с координатой начального звена механизма (обобщенной координатой механизма): (t) (t) М . К звену модели приложен приведенный момент Мпр, а момент инерции Jм этого звена относительно оси вращения является суммарным приведенным моментом инерции механизма Jм Jпр . В качестве звена приведения выбираем кривошип 1. Мспр. - приведенный момент от сил сопротивления; Мд пр. - приведенный момент от движущих сил; Jпр. - суммарный приведенный момент инерции Мпр. - суммарный приведенный момент Динамическое исследование механизма проводится по методу Н.И. Мерцалова. 1.4 Определение приведённого момента инерции II группы звеньев Ко второй группе относятся звенья, для которых приведенный момент инерции не является постоянной величиной. В рассматриваемом механизме переменный приведенный момент инерции имеют звенья 2 и 3. Звено 2 совершает плоское движение. Звено 3 совершает поступательное движение. Суммарный приведённый момент инерции второй группы звеньев равен сумме приведенных моментов инерции этих звеньев. 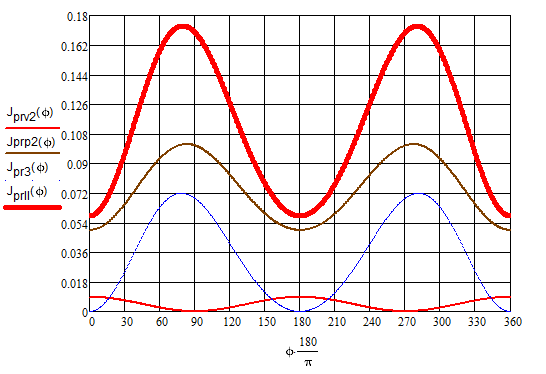 1.5 Приведение сил Для технологических машин необходимо определить приведённый момент сил сопротивления Мспр. Приведённый момент сил сопротивления складывается из приведённых моментов сил действующих на поршень и приведённых моментов от сил тяжести звеньев. Определим силу сопротивления из индикаторной диаграммы усилий прессования. 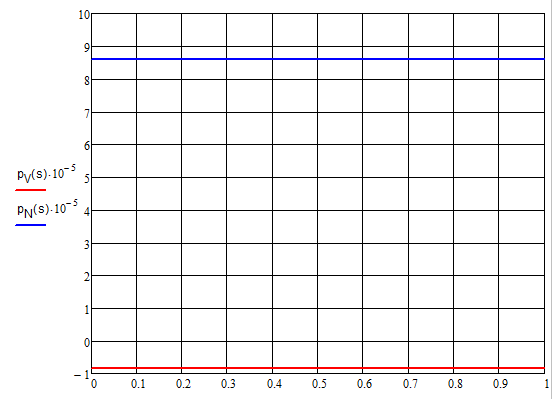 Определим площадь поршня(1), штока (2), и площадь на которую действует сила в левом объеме (3).   При ходе поршня вправо клапаны I и П открыты Через клапан I происходит всасывание, а через клапан П- вытеснение жидкости в напорную трубу. В это время клапаны Ш и IV закрыты. При обратном ходе поршня жидкость через клапан Ш поступает в рабочую камеру, а через клапан IV - в напорную трубу. Таким образом, всасывание и нагнетание жидкости происходят при каждом ходе поршня. 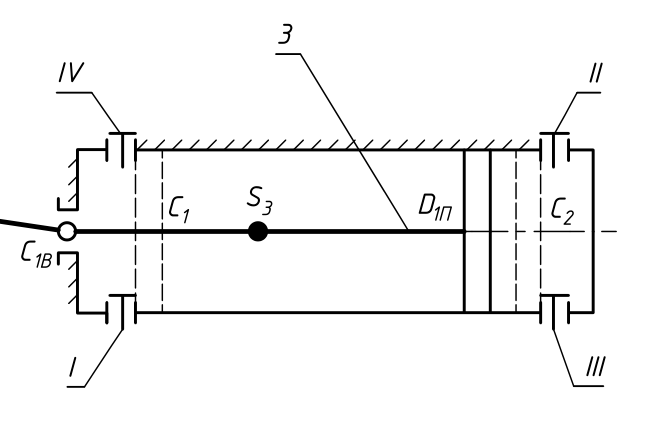   Приведённый момент от силы определяется как скалярное произведение вектора силы на вектор аналога скорости точки приложения этой силы. 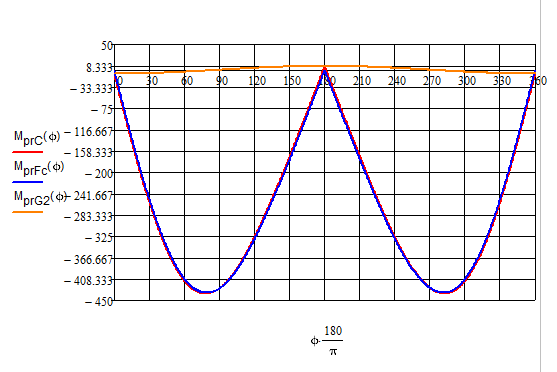 Работу сил сопротивления за цикл определяем по формуле:  Приведенный момент движущих сил  определен из условия, что при установившемся движении определен из условия, что при установившемся движении  за цикл за цикл Суммарный приведенный момент:  Суммарная работа  всех сил равна работе всех сил равна работе  : :  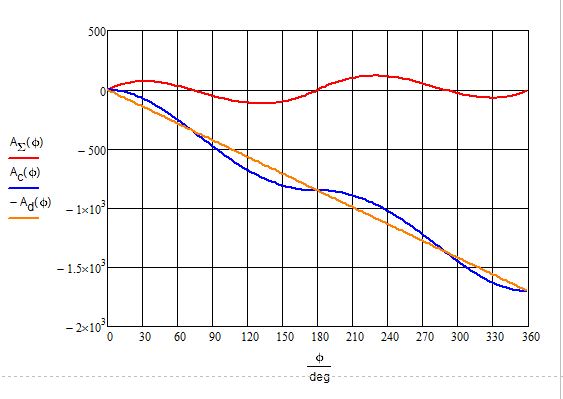 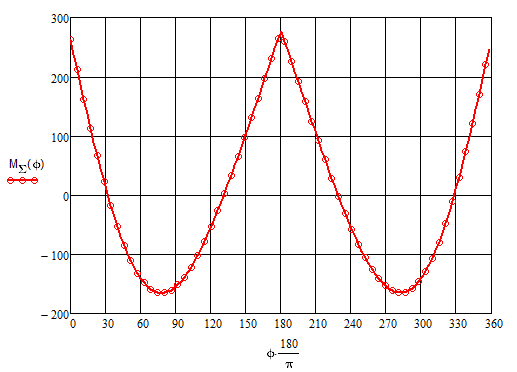 1.6 Определение кинетической энергии второй группы звеньев Для определения кинетической энергии  используют приближенное равенство используют приближенное равенство  , впервые предложенное Н.И. Мерцаловым. , впервые предложенное Н.И. Мерцаловым.   1.7 Определение изменение кинетической энергии первой группы звеньев 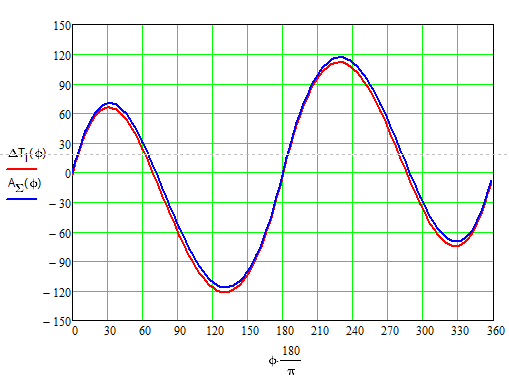 Определим максимальное и минимальное значение ∆ТI для нахождения наибольшего изменения кинетической энергии первой группы звеньев. 1.8 Определение момента инерции первой группы звеньев Момент инерции первой группы звеньев  находится по формуле Мерцалова: находится по формуле Мерцалова: 1.9 Определим максимальное и минимальное значение ∆ТI для нахождения наибольшего изменения кинетической энергии первой группы звеньев. - наибольшее изменение кинетической энергии первой группы звеньев; 1.10 Определение закона движения. Угловая скорость. Угловое ускорение. При установившемся режиме работы, для определения угловой скорости, вследствие неравномерности вращения необходимо вводить поправки на определение угловой скорости, для этого определяю изменение угловой скорости.   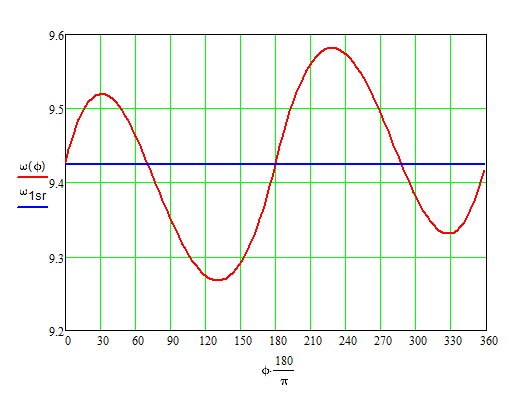 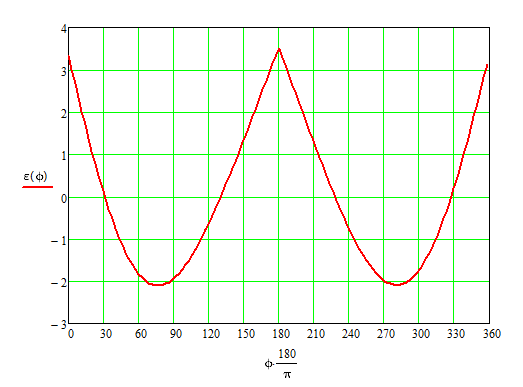 1.11 Определение необходимого момента инерции маховых масс 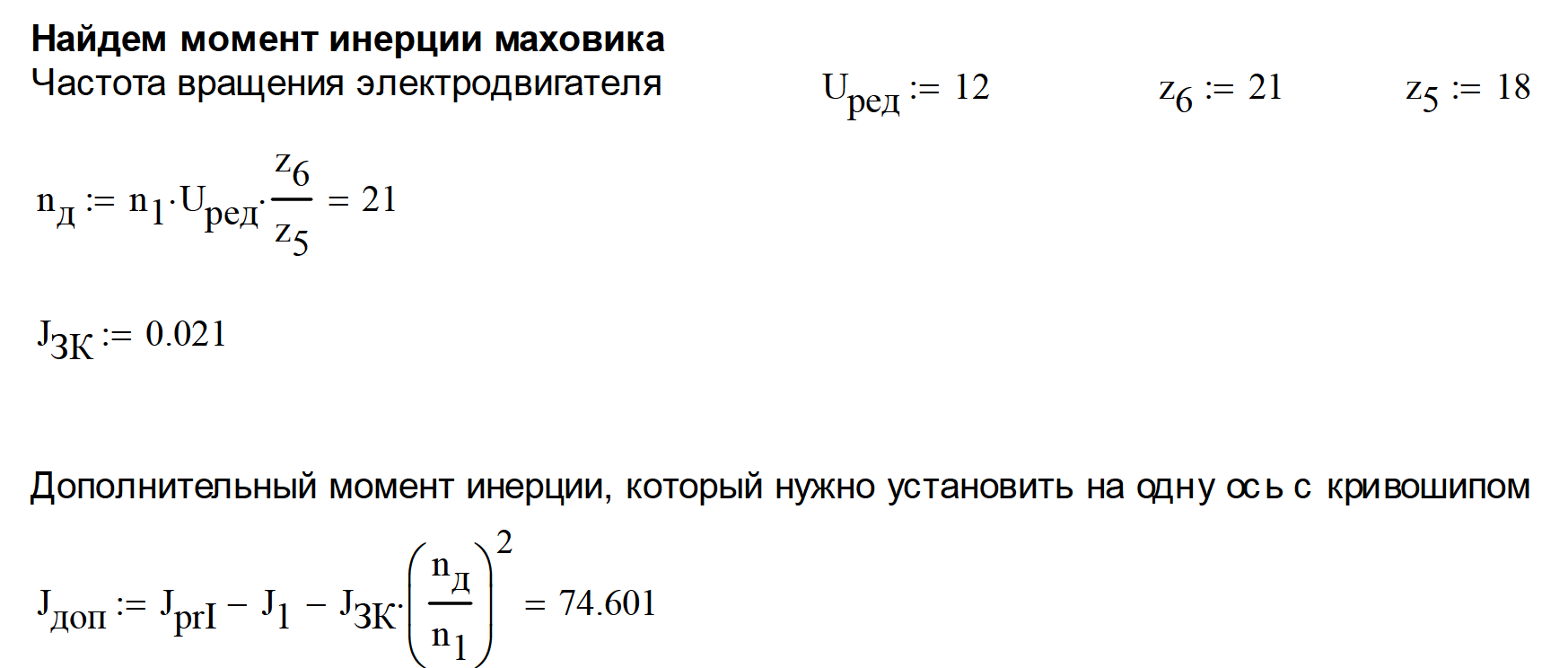 Определим размеры и массу маховика в виде обода для минимизации габаритов  |