|
|
курсовая ТСС 6 курс. ТСС 6 ВАРИАНТ заочка МК Ростов. Исследование работы и эксплуатационных характеристик дистанционных магнитных компасов
1.3 Следящая система компаса
Дистанционная электрическая передача магнитного компаса КМ-145-8 обеспечивает подключение репитеров гирокомпасного типа. На оптическом репитере изображается сектор картушки, равный 30е.
Электрическая схема компаса рассчитана на подключение ее к судовой сети напряжением 220 В, частотой 50 Гц. Компенсаторы электромагнитной девиации подсоединяют к специальной линии постоянного тока напряжением 220 В. Имеется аварийный режим питания постоянным током (напряжением 27 В), при этом обеспечиваются только подсветка картушки датчика курса и работа оптического репитера.
Датчик курса магнитного компаса КМ-145-8 заполнен жидкостью ПМС-5, которая обеспечивает нормальную работу прибора при температуре (—55)—(+65) °С.
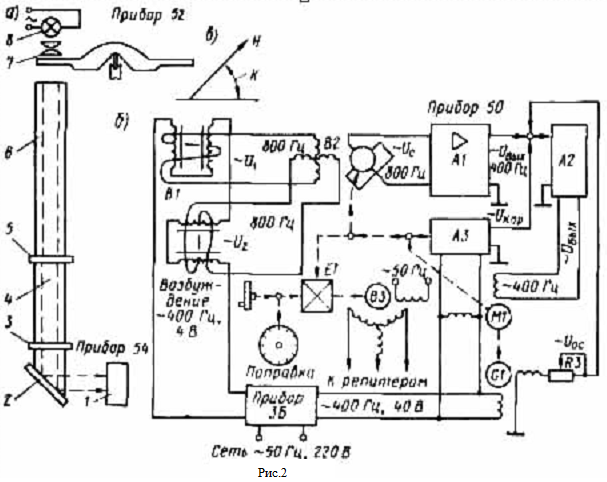
Функциональная схема магнитного компаса КМ-145-8. Основным элементом компаса является картушка — магнитный чувствительный элемент (МЧЭ), обеспечивающий непосредственное и дистанционное курсоуказание. Магнитный чувствительный элемент представляет собой систему магнитов, закрепленных на поплавке. Реакция поддерживающей жидкости уравновешивает действие веса картушки, что создает эффект невесомости и снижает трение в опоре. Круговая шкала картушки дает возможность считывать курс судна непосредственно.
Осветительное устройство 8 (рис. 2, а) с конденсорными линзами 7 позволяет осуществлять дистанционную оптическую передачу изображения картушки на матовое стекло прибора 54, установленного в ходовой рубке. Световые лучи, пройдя по трубе6, фокусируются объективом 5 на торцовой части гибкого волоконного светопровода 4, проникают через второй объектив 3, отражаются в зеркале 2 и дают изображение на матовом стекле.
Датчиком дистанционной электрической передачи курса является индукционный чувствительный элемент В1 (рис. 2, б), состоящий из двух ортогонально расположенных феррозондов. Датчик В1 закреплен в нижней части котелка (вмонтирован в груз, под действием которого котелок занимает отвесное положение).
Феррозонд имеет два пермаллоевых сердечника и две обмотки. Одна обмотка подключена к источнику переменного тока напряжением 4 В, частотой 400 Гц и служит для подмагничивания сердечников. Она намотана на каждый сердечник в отдельности и образует встречно-последовательную цепь. Другая обмотка, охватывающая оба сердечника, является сигнальной. В ней возникает сигнальное напряжение удвоенной частоты (800 Гц), амплитуда которого определяется углом ориентации стержней феррозонда относительно вектора индукции магнитного поля, создаваемого картушкой в пространстве, где находится феррозонд, т. е. сигнал зависит от курса судна К.
Датчик В1, имеющий два феррозонда, выдает два сигнала: (U1 и 11.г, причем один пропорционален синусу курса судна, а другой — косинусу. Сигналы t/t и U2 подаются на статорные обмотки вращающегося трансформатора В2, где они суммируются. Результирующий сигнал Uc с выходной обмотки вращающегося трансформатора В2 поступает на предварительный усилитель А1. Помимо усиления, сигнал £/с здесь преобразуется в напряжение частотой 400 Гц, а затем в блоке А2 происходит окончательное усиление сигнала (по мощности).
С выхода усилителя А2 напряжение (Увых подается на управляющую обмотку исполнительного двигателя Ml (к основной обмотке этого двигателя подводится питающий ток частотой 400 Гц, напряжением 40 В от прибора ЗБ). Вращение двигателя Ml через редуктор передается на ротор трансформатора В2. Отработка следящей системы продолжается до тех пор, пока сигнал Uc не станет равен нулю.
В этом заключается компенсационный метод измерения угла ориентации феррозондового датчика В1 относительно вектора индукции магнитного поля, в котором находится картушка компаса, т.е. определение и дистанционная передача курса судна. Любое изменение курса вызывает появление сигнала Uc, который после усиления вызывает вращение двигателя Ml и отработку ротора В2 на угол, пропорциональный изменению курса судна.
Одновременно с ротором трансформатора В2 поворачивается ротор сельсина-датчика ВЗ, который передает это вращение на сельсины-приемники репитерной системы.
В приборе 50 предусмотрен ручной ввод общей поправки магнитного компаса А — d + 6 с учетом склонения d и девиации б. Значение общей поправки (для данного курса) вводится через дифференциал Е1, после этого на репитерах компаса устанавливается отсчет истинного курса. В тех случаях, когда поправка не вводится, ее следует учитывать обычным образом, складывая алгебраически ее значение с отсчетом курса (пеленга), снятого с репитера.
Для исключения инструментальной ошибки, обусловленной неточной работой феррозондов, в схеме предусмотрен индукционный корректор A3, который по заранее составленной программе формирует дополнительное напряжение ^t/Kop, подаваемое на вход усилителя А2. Программа корректора реализуется от механизма следящей системы при отработке двигателя Ml.
Автоколебания в репитерной системе гасятся посредством введения сигнала
t/0.c обратной связи. Этот сигнал создается генератором G1 только при вращении двигателя Ml. Потенциометром R3 выполняется регулировка сигнала обратной связи, уровень которого должен быть достаточным для обеспечения нормальной колебательности шкалы репитера. Установку регулятора R3 выполняют в порту.
2 ПОДГОТОВКА МАГНИТНОГО КОМПАСА К РЕЙСУ
2.1 Проверка котелка магнитного компаса и пеленгатора
Точность определения курса с помощью МК, а также надежности работы прибора в значительной степени зависит от выполнения правил его эксплуатации, которые приводятся в сопровождающей данный прибор документации. Различные модели МК могут иметь специфические, присущие только им, эксплуатационные особенности, и это надо учитывать. Однако многие приемы работы с МК являются общими, что позволяет рассматривать их безотносительно к типу компаса.
Техническое обслуживание МК складывается:
из оценки точности общего состояния прибора;
из оценки текущих составляющих его инструментальной погрешности и приведения их значений в соответствие с требованиями технической документации на прибор;
из работ, направленных на снижение влияния судового железа на показания компаса.
Основную нагрузку по обслуживанию МК берут на себя береговые специалисты. Однако, судовые специалисты должны:
периодически определять поправку компаса и степень соответствия данных таблицы остаточной девиации реальным их значениям;
при возникновении больших ошибок компаса определить причины, обусловившие их появление, и при наличии технической возможности, устранить дефекты;
в длительных рейсах, не реже одного раза в два – три месяца проводить техническую проверку компаса, содержание которой определяется техническими условиями на прибор.
Оценка технического состояния прибора
Оценка технического состояния прибора предусматривает:
проведение внешнего осмотра прибора,
проверку технического состояния котелка МК;
проверку качества работы дистанционных систем передачи информации;
проверку устройств для регистрации (записи) информации, получаемой с МК с единой курсовой системы, включающей в себя МК.
Внешний осмотр прибора
Для оценки общего состояния прибора необходимо прежде всего провести его внешний осмотр. Осмотр следует начать с места, где он установлен. Вблизи компаса не должны находиться посторонние предметы особенно способные повлиять на его показания. После этого следует осмотреть сам компас и устранить имеющуюся коррозию очистить его от грязи и отложившейся соли. Проверить состояние и крепление девиационных магнитов, разъемов и регуляторов электропитания элементов оптической системы дистанционной передачи. Проверить освещение прибора.
Проверка технического состояния котелка МК
Компасный котелок и пеленгатор должны удовлетворять требованиям нормативных документов. В частности:
в основной (верхней) камере не должно быть пузырьков воздуха;
стекло компасного котелка должно быть чистым;
азимутальный круг должен совпадать с горизонтальной плоскостью с точностью до 2;
эксцентриситеты пеленгатора и азимутальной шкалы не должны превышать 0,5 мм;
визирная плоскость пеленгатора должна быть перпендикулярна азимутальному кругу и проходить через его середину (центр);
отражающая грань призмы глазной мишени должна быть перпендикулярна визирной плоскости пеленгатора;
застой чувствительного элемента компаса не должен превышать (3/В) где В – горизонтальная составляющая индукции магнитного поля выраженная в микротеслах;
общая погрешность компасного котелка и пеленгатора не должна превышать 0,5°;
нактоуз компаса должен быть выверен.
Рассмотрим методику выполнения отдельных проверок и регулировок, которые можно проводить в судовых условиях.
Приступая к проверке котелка МК следует убедиться в отсутствии в нем пузырьков воздуха, которые могут затруднять съем информации. При их наличии удаление из котелка пузырьков воздуха, как правило, производится путем его поворота вокруг горизонтальной оси и покачивания с тем, чтобы эти пузырьки переместились в специальную полость, из которой они уже не смогут выйти обратно. В том случае, если размеры воздушного пузырька достаточно большие и его не удается удалить, то в котелок следует добавить некоторое количество компасной жидкости. Жидкость доливается с помощью специальной воронки через отверстие, имеющееся в корпусе прибора.
Проверка горизонтальности азимутального круга проводится с помощью пузырькового уровня, который накладывается на стекло котелка вначале параллельно диаметральной плоскости судна, а затем перпендикулярно ей. Если будет обнаружен наклон, необходимо вызвать береговых специалистов, которые устранят его. Устранение наклона обычно производится путем высверливания части балансировочного груза.
Далее следует осмотреть пеленгатор, обратив внимание на состояние нити предметной мишени. При наличии ее изгибов следует натянуть нить или заменить на новую. После этого необходимо провести проверку положения визирной плоскости пеленгатора. В судовых условиях она складывается из проверки положения предметной и глазной его мишеней. Нить предметной мишени и прорезь глазной должны располагаться в вертикальной плоскости. Проверку этих условий осуществляют путем пеленгования отвеса, удаленного на расстояние 3-4 метра от компаса. Для устранения обнаруженных отклонений под правую или левую лапки мишеней помещают прокладки из фольги.
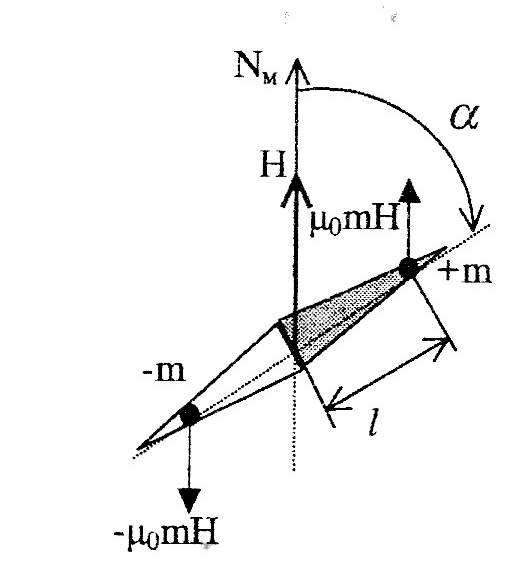
Проверка картушки на застой. Как известно, угол застоя картушки зависит от ее магнитного момента, величины напряженности горизонтальной составляющей магнитного поля Земли в данной точке и от момента трения в опоре подвеса картушки. Поэтому в технических условиях на прибор оговариваются не только значение допустимого застоя, но и магнитного поля, при которой должны проводиться измерения. Требуемое значение напряженности может быть получено посредством использования дефлектора, с помощью которого можно усилить или ослабить судовое поле.
Если специальные требования к углу застоя картушки не оговариваются его оценку можно проводить при существующей напряженности судового магнитного поля, принимая во внимание требования ИМО.
Для измерения величины застоя с помощью какого-либо не сильного магнита отклоняют картушку компаса от установившегося положения на угол, равный 2-3 градусам. После этого магнит убирают, дают картушке успокоиться и снимают ее показания. Измерения повторяют при отклонении картушки в противоположную сторону. Полуразность показаний определяет искомую величину. При обнаружении недопустимого застоя следует заменить шпильку МК. Порядок замены шпильки определяется конструктивными особенностями прибора и эту работу лучше поручить береговым специалистам
О пригодности котелка к эксплуатации можно судить по результатам общей его проверки, которая производится в береговых условиях в таком месте, где отсутствуют возмущающие магнитные поля, порождаемые близлежащими металлическими конструкциями и другими источниками постоянного магнитного поля. Критериями качества котелка являются вариации пеленга и курсового угла неподвижного ориентира, полученные в результате измерений, проведенных на восьми главных и четвертных курсах при последовательном приведении на них котелка, установленного на девиационной треноге. Вариации пеленга на ориентир определяют как разницу между магнитным пеленгом (или ОМП) и значением пеленга, полученного путем осреднения данных двух его измерении на данном курсе при подходе к нему с разных сторон. Аналогичным образом определяют вариации курсовых углов. Указанные параметры должны находиться в допустимых пределах. Если это не выполняется, котелок следует передать береговым службам для выяснения причин указанного несоответствия.
Собственное движение картушки магнитного компаса представляет собой процесс ее установления в меридиан, если она в силу каких-либо обстоятельств отклонилась от него на угол α. Это движение получило название переходного процесса. Оно определяет закон изменения угла α во времени, и тем самым дает возможность оценить ошибки, которые приобретает прибор в течение переходного процесса и после его окончания.
Для построения графика переходного процесса, необходимо найти следующие величины:
 1. 1.  ; 2. ; 2. 
3.  ; 4. ; 4.  ; ;
Общее уравнение колебательного процесса имеет вид:
Исходные данные для построения переходного процесса картушки
Параметры
|
Значение
|
Магнитный момент картушки (АМ2)
|
2,0
|
Момент инерции картушки х 10-3 (г см2)
(значит I=1,2 103)
|
1,9
|
Коэффициент демпфирования (с-1)
|
0,12
|
Момент трения х 10-7 (Н м)
|
0,2
|
Начальное отклонение картушки (град)
|
15
|
Напряженность Н магнитного поля Земли (А/м)
|
6,0
|
Исходные данные позволяют нам определить основные величины, необходимые для построения переходного процесса:
1. ω02 = 0,09;
2. q = 0,274;
3. A = 16,38;
4. ψ = 0,41;
5. αч = 0,0013;
6. T0 = 70,43.
Подставляя найденные коэффициенты в общее уравнение колебательного процесса, мы получаем следующий график:
График переходного процесса
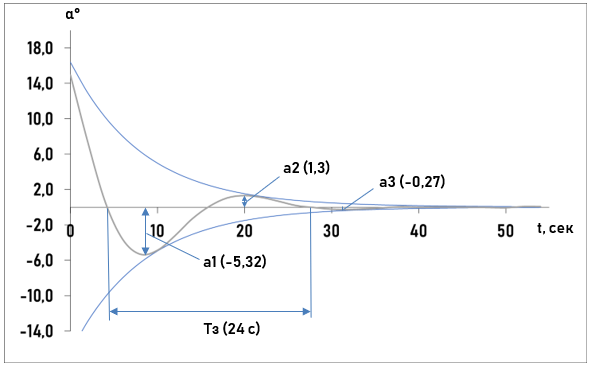
Фактор затухания ƒ=4,5.
Угол застоя находится в пределах допустимых значений (0,0013 рад = 0,08°), можно сделать вывод, что система работает нормально.
2.2 Анализ кривой девиации магнитного компаса
Курс
|
0
|
45
|
90
|
135
|
180
|
225
|
270
|
315
|
Девиация
|
-4
|
9,2
|
3,1
|
7,8
|
-2
|
-11
|
0
|
6,2
| |
|
|
 Скачать 0.93 Mb.
Скачать 0.93 Mb.